1
Изобретение относится к автоматизации листоштамповочных работ ,и может быть использовано для подачи листового материала в рабочую зону пресса.
Целью изобретения является повышение надежности работы устройства.
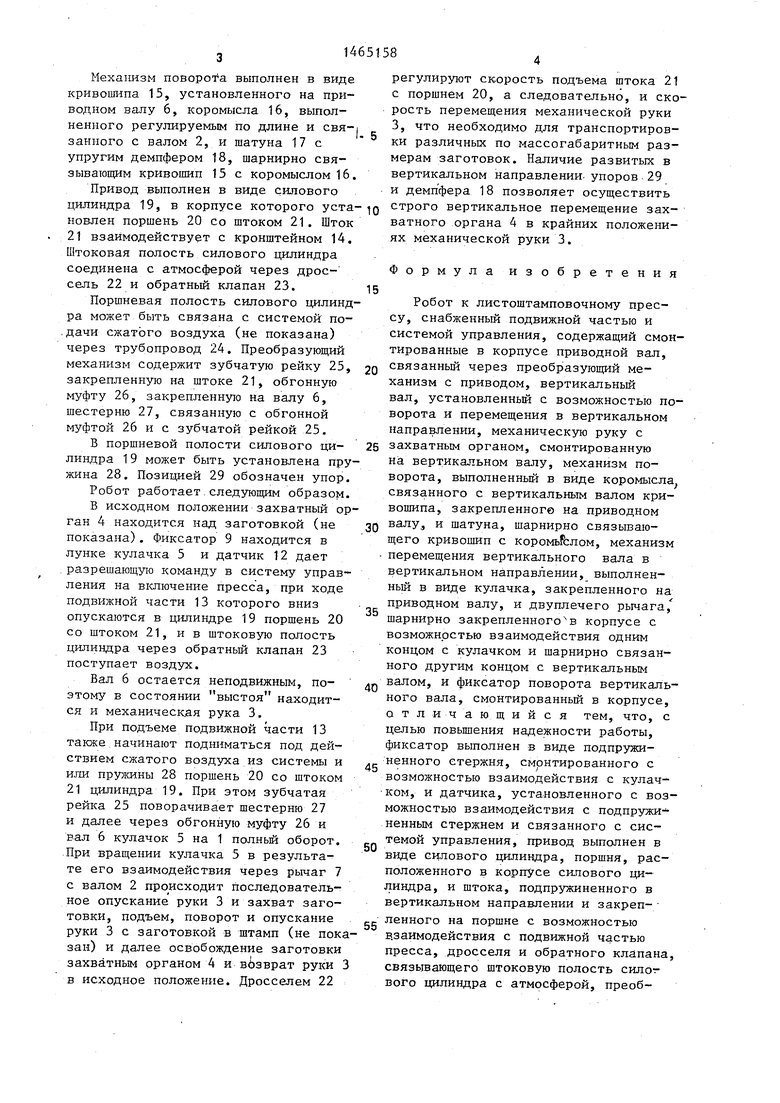
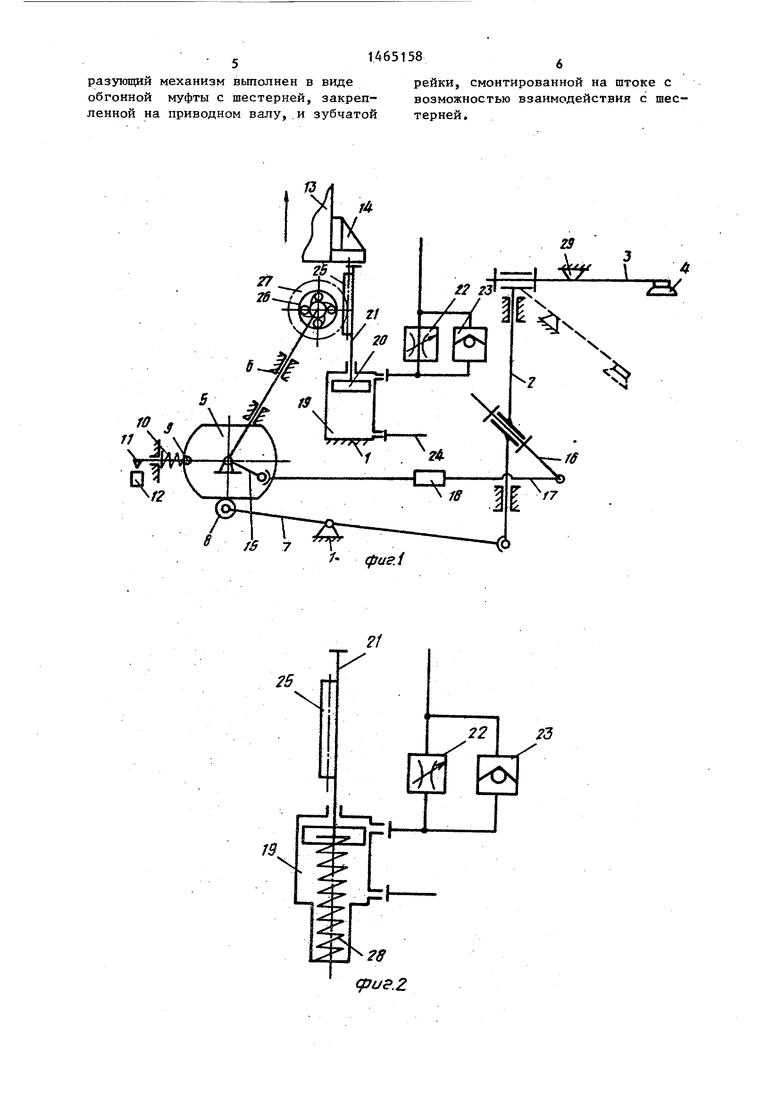
На фиг. 1 изображена схема робота к листоштамповочному прессу; на фиг. 2 - силовой цилиндр.
Робот к листоштамповочному прессу содержит корпус 1, в котором установлен вертикально вал 2, несущий механическую руку 3 с захватным органом 4, механизм поворота вала 2, механизм перемещения вала 2 в вертикальном направлении, привод и преобразующий механизм.
Механизм поворота содержит кулачок 5, смонтированный на приводном валу 6, двуплечий рычаг 7, шарнирно закрепленный в корпусе 1, ролик 8, установленный на одном из концов двуплечего рычага 7 с возможностью взаимодействия с кулачком 5.
Другой конец двуплечего рычага шарнирно связан с валом 2.
В корпусе смонтирован фиксатор 9, выполненный в виде подпружиненного пружиной 10 стержня 11, взаимодействующего с кулачком 5 и датчиком 12. Датчик.12 связан с системой управления прессом (не показаны). Пресс имеет подвижную часть 13, несущую кронштейн 14.
О5
сд
пА
ел
00
Меха1шзм поворота выполнен в виде кривошипа 15, установленного на приводном валу 6, коромысла 16, выполненного регулируемым по длине и связанного с валом 2, и шатуна 17с упругим демпфером 18, шарнирно связывающим кривошип 15 с коромыслом 16
Привод выполнен в виде силового цилиндра 19, в корпусе которого уста новлен поршень 20 со штоком 21. Шток 21 взаимодействует с кронштейном 14. Штоковая полость силового цилиндра соединена с атмосферой через дроссель 22 и обратный клапан 23.
Поршневая полость силового цилиндра может быть связана с системой по- ,дачи сжатого воздуха (не показана) через трубопровод 24. Преобразующий механизм содержит зубчатую рейку 25, закрепленную на штоке 21, обгонную муфту 26, закрепленную на валу 6, шестерню 27, связанную с обгонной муфтой 26 и с зубчатой рейкой 25.
В поршневой полости силового ци- линдра 19 может быть установлена пружина 28. Позицией 29 обозначен упор.
Робот работает следующим образом.
В исходном положении захватный орган 4 находится над заготовкой (не показана). Фиксатор 9 находится в лунке кулачка 5 и датчик 12 дает разрешающую команду в систему управления на включение пресса, при ходе подвижной части 13 которого вниз опускаются в цхшиндре 19 поршень 20 со штоком 21, и в штоковую полость цилиндра через обратньш клапан 23 поступает воздух.
Вал 6 остается неподвижным, по- этому в состоянии выстоя находится и механическая рука 3.
При подъеме подвижной части 13 та1сже . начинают подниматься под действием сжатого воздуха из системы и или прулшны 28 поршень 20 со штоком 21 цилиндра 19. При этом зубчатая рейка 25 поворачивает шестерню 27 и далее через обгонную муфту 26 и вал 6 кулачок 5 на 1 полньй оборот. При вращении кулачка 5 в результате его взаимодействия через рычаг 7 с валом 2 происходит последовательное опускание руки 3 и захват заготовки, подъем, поворот и опускание руки 3 с заготовкой в штамп (не показан) и далее освобождение заготовки захватным органом 4 и возврат руки 3 в исходное положение. Дросселем 22
регулируют скорость подъема штока 2 с поршнем 20, а следовательно, и скорость перемещения механической руки 3, что необходимо для транспортировки различных по массогабаритным размерам заготовок. Наличие развитых в вертикальном направлении, упоров - 29 и демпфера 18 позволяет осуществить строго вертикальное перемещение захватного органа 4 в крайних положениях механической руки 3.
Формула изобретения
Робот к листоштамповочному прессу, снабженный подвижной частью и системой управления, содержащий смонтированные в корпусе приводной вал, связанньй через преобразующий механизм с приводом, вертикальный вал, установленный с возможностью поворота и перемещения в вертикальном направлении, механическую руку с захватным органом, смонтированную на вертикальном валу, механизм поворота, выполненньм в виде коромысла связанного с вертикальным валом кривошипа, закрепленного на приводном валу, и шатуна, шарнирно связывающего кривошип с коромь Ьлом, механизм перемещения вертикального вала в вертикальном направлении, выполненный в виде кулачка, закрепленного На приводном валу, и двуплечего рычага, шарнирно закрепленного в корпусе с возможностью взаимодействия одним концом с кулачком и шарнирно связанного другим концом с вертикальным валом, и фиксатор поворота вертикального вала, смонтированный в корпусе, отличающийся тем, что, с целью повьш1ения надежности работы, фиксатор вьтолнен в виде подпружиненного стержня, смонтированного с возможностью взаимодействия с кулачком, и датчика, установленного с возможностью взаимодействия с подпружиненным стержнем и связанного с системой управления, привод выполнен в виде силового цилиндра, поршня, расположенного в корпусе силового цилиндра, и штока, подпружиненного в вертикальном направлении и закреп- ленного на поршне с возможностью дзаимодействия с подвижной частью пресса, дросселя и обратного клапана, связывающего штоковую полость силог вого цилиндра с атмосферой, преоб. 51465158
разунлций механизм вьтолнен в виде рейки, смонтированной на штоке с обгонной муфты с шестерней, закреп- возможностью взаимодействия с шес- ленной на приводном валу,.и зубчатой терней.
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот к листоштамповочному прессу | 1978 |
|
SU795935A1 |
| Устройство к прессу с приводным валом для подачи полосового и ленточного материала в рабочую зону | 1981 |
|
SU1013050A1 |
| Промышленный робот | 1985 |
|
SU1268254A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Устройство для отделения листовых заготовок от стены и подачи в рабочую зону машины-орудия | 1982 |
|
SU1061899A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Устройство для пробивки отверстий в материале | 1989 |
|
SU1690918A1 |
| Устройство для подачи материала в рабочую зону пресса | 1987 |
|
SU1488075A1 |
| Устройство для укладки ампул в кассету | 1988 |
|
SU1622224A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
Изобретение относится к обработке металлов давлением, а именно к области автоматизации листоштамповочных работ. повьшение надежности работы. При листоштамповочных работах на прессах листы, а также отходы перемещаются промышленным роботом. Схват материала осуществляется захваченным органом, закрепленным на механической руке. Последняя уста- новлена на вертикальном валу. Вал снабжен механизмам поворота и меха .низмом подъема.. Механизм подъема выполнен в виде смонтированного в корпусе приводного вала и двуплечего рычага. На валу закреплен кулачок. Двуплечий рычаг шарнирно закреплен в корпусе. Один конец рычага шарнирно связан с вертикальным валом, а другой - взаимодействует с кулачком. Механизм поворота выполнен в виде кривошипа, закрепленного на приводном валу, коромысла, связанного с вертикальным валом шатуна, шарнирно связывающего кривошип с коромыслом. В корпусе смонтирован подпружиненный фиксатор, взаимодействующий с кулачком. 2 ил. SS ел
фиг.1
23
// /j -Tv
уЧ
4У
7
V
4
Г6
| Робот к листоштамповочному прессу | 1978 |
|
SU795935A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
