Изобретение относится к области медицины, робототехники и управления, а именно к способам и устройствам для управления камерой при проведении хирургических операций [A61B34/00, A61B34/30, A61B34/35, A61B34/37, B25J9/16, B25J13/00, B25J13/04, B25J19/04, G05B15/00, G05B15/02, G05B19/00, G05B19/19, G06F3/01, G06F3/03, G06F3/0338, G06F3/0346].
Из уровня техники известна ВИРТУАЛЬНАЯ ЭЛЕКТРОННАЯ ПЕДАЛЬ [RO131348 (A2), опубл.: 30.08.2016], отличающаяся тем, что она состоит из системы управления и трансмиссии, установленной в пятке обуви или в браслете, прикрепленный к щиколотке ноги оператора, который уведомляет и передает команду, отданную оператором, путем движения пятки и стопы вверх или вниз, преднамеренных движений оператора, система, которая подключается по беспроводной сети к принимающей системе и исполнительный механизм для подключения, отключения и приведения в действие инструмента или устройства, система управления и передачи состоит из датчика движения типа акселерометра и гироскопа, сигналы которого, в зависимости от положения ноги оператора, передаются в модуль анализа с микроконтроллером, который с помощью математического алгоритма различает нормальное движение оператора и конкретные преднамеренные движения и передает беспроводные команды через модуль передачи и антенну в систему приема и срабатывания, которая состоит из модуля приема с антенной сигнала, генерируемого системой управления и передачи, сигнал передается далее через модуль управления с микроконтроллером в модуль подключения и срабатывания и инструмент или устройство, модуль анализа микроконтроллера через датчик движения, анализирующий движения пятки, голеностопного сустава, пальца ноги и стопы по всем пространственным координатам x, y, z, а также угловую скорость по трем координатам.
Недостатком аналога является его низкая надежность, к которой в данной области техники применяются высокие, не имеющие права на ошибку, требования. Кроме того, при проведении хирургических операций, врач всецело поглощен этой процедурой и постоянно перемещается, что может явиться причиной непроизвольных и неконтролируемых движений частью тела, на которой закреплен датчик, вследствие чего система посчитает их за отданную команду и примет к исполнению, что может явиться критической ошибкой для врача.
Из уровня техники известен СПОСОБ УПРАВЛЕНИЯ КАМЕРОЙ В РОБОТОХИРУРГИЧЕСКОЙ СИСТЕМЕ [WO2021173044 (A1), опубл.: 02.09.2021], закрепленной на манипуляторе роботохирургического комплекса, включающего два контроллера управления роботохирургическим комплексом, каждый из которых выполнен с возможностью оцифровывания движений рук хирурга и обеспечивающий передачу векторов движения по трем поступательным и трем вращательным степеням свободы, представляющих разность между координатами контроллера управления в начальном положении и координатами контроллера управления при изменении положения руки хирурга, при этом каждый контроллер управления выполнен с возможностью переключения в режим управления камерой с помощью педали управления; по меньшей мере один манипулятор с закрепленной на нем камерой для обзора операционного поля, обеспечивающий ее перемещение по трем поступательным степеням свободы; систему автоматического управления, которая связана с обоими контроллерами управления и по меньшей мере одним манипулятором; при этом способ характеризуется следующими шагами: передача данных векторов движения по трем поступательным и трем вращательным степеням свободы правого и левого контроллера управления в систему автоматического управления с постоянной частотой, осуществление переключения контроллеров управления в режим управления камерой, закрепленной на манипуляторе, путем нажатия на педаль управления, при этом сигнал с педали управления передают в систему автоматического управления и на контроллеры управления для блокировки у последних вектора движения вращательных степеней свободы, причем после блокировки вращательных степеней свободы контроллера управления вектор вращательных координат в системе автоматического управления обнуляется; осуществление управления движением манипулятора с закрепленной на нем камерой посредством одновременного перемещения контроллеров управления и последующего выполнения следующих этапов: этап сохранения полученных векторов движения контроллеров управления в системе автоматического управления; этап обработки и объединения векторов движения правого и левого контроллера управления, характеризующих поступательные движения, для нахождения суммарного перемещения; этап масштабирования полученного на предыдущем этапе вектора перемещения; этап компенсации движения, содержащий суммирование отмасштабированного вектора перемещения и вектора текущего положения указанного манипулятора в его локальной декартовой системе координат, и перевод полученного вектора положения манипулятора из декартовой в сферическую систему координат; этап компенсации отклонения линии горизонта от средней линии кадра путем вычисления величины расхождения угла, зависящего от углов наклона камеры в сферической системе координат; этап одновременной передачи полученных на предыдущих шагах данных на исполнительные механизмы манипулятора для его поступательного перемещения и поворота вокруг продольной оси закрепленной на нем камеры.
Недостатком аналога является низкая надежность роботохирургической системы, обусловленная сложностью ее конструкции.
Наиболее близким техническим решением является МНОГООСЕВОЙ ЭЛЕКТРОННО-МЕХАНИЧЕСКИЙ ХИРУРГИЧЕСКИЙ МАНИПУЛЯТОР [RU191867 (U1), опубл.: 26.08.2019], включающий пульт управления, приводную часть, установленную на основании и конструктивно состоящую из соединенных последовательно друг с другом исполнительных механизмов, где каждый механизм обеспечивает перемещение по одной из заданных осей держателя хирургического инструмента, закрепленного на конечном исполнительном механизме, отличающийся тем, что исполнительные механизмы соединены в следующей последовательности: исполнительный механизм перемещения по вертикальной оси, закрепленный на основании, исполнительный механизм перемещения по горизонтальной оси, исполнительный механизм углового перемещения с держателем хирургического инструмента, при этом оси всех исполнительных механизмов перпендикулярны между собой, и каждый исполнительный механизм соединен в единую электрическую цепь с пультом управления, который выполнен электромеханическим, управляемым ногой оператора.
Основной технической проблемой прототипа является высокое время задержки прохождения команды управления, обусловленное наличием в конструкции пульта управления нескольких педалей, быстрый выбор врачом которых затруднителен из-за необходимости переключения внимания врача от пациента на упомянутый пульт, что не всегда возможно. Другим недостатком является низкая точность позиционирования камеры из-за возможности прекращения управления только при прекращении воздействия на органы управления.
Задачей изобретения является устранение недостатков прототипа.
Технический результат изобретения заключается в повышении точности и уменьшении времени задержки автоматизированного управления лапароскопом при выполнении хирургической операции.
Указанный технический результат достигается за счет того, что устройство управления хирургическим роботом, содержащее манипулятор, пульт управления, включающий электромеханическую приводную часть, установленную на платформе-основании и исполнительные механизмы, где каждый механизм обеспечивает перемещение по одной из заданных осей держателя хирургического инструмента, отличающийся тем, что в качестве хирургического инструмента в держателе смонтирован лапароскоп с видеообъективом на конце, передающий изображение через модулятор и контроллер на монитор, исполнительные механизмы и электромеханическая приводная часть подключены к контроллеру, при этом электромеханическая приводная часть выполнена в виде обращенной вниз полусферической педали, упруго смонтированной с помощью пружины сжатия в нише, выполненной в платформе-основании и снабжена импульсным реле-переключателем, выполненным с возможностью снятия напряжения с управляемой с помощью электромеханической частью электрической цепи исполнительных механизмов через заданный промежуток времени, электромеханическая часть содержит магнитные переключатели, смонтированные на боковых стенках у основания педали, ответные части которых смонтированы на стенках ниши, таким образом, что оказываются напротив только при нажатой вниз педали, между боковой поверхностью педали и стенками ниши выполнен зазор, исключающий самопроизвольный контакт частей магнитных переключателей, но с возможностью его преодоления и замыкания электрической цепи при перемещении врачом педали в одном из направлений.
В частности, манипулятор выполнен из шарнирно соединенных между собой звеньев.
В частности, шарнирные соединения звеньев манипулятора снабжены приводами для их перемещения.
В частности, магнитные переключатели выполнены в виде герконовых переключателей.
В частности, на плоском основании педали по краям смонтированы вертикальные борта с возможностью обеспечения упора для ноги.
Краткое описание чертежей.
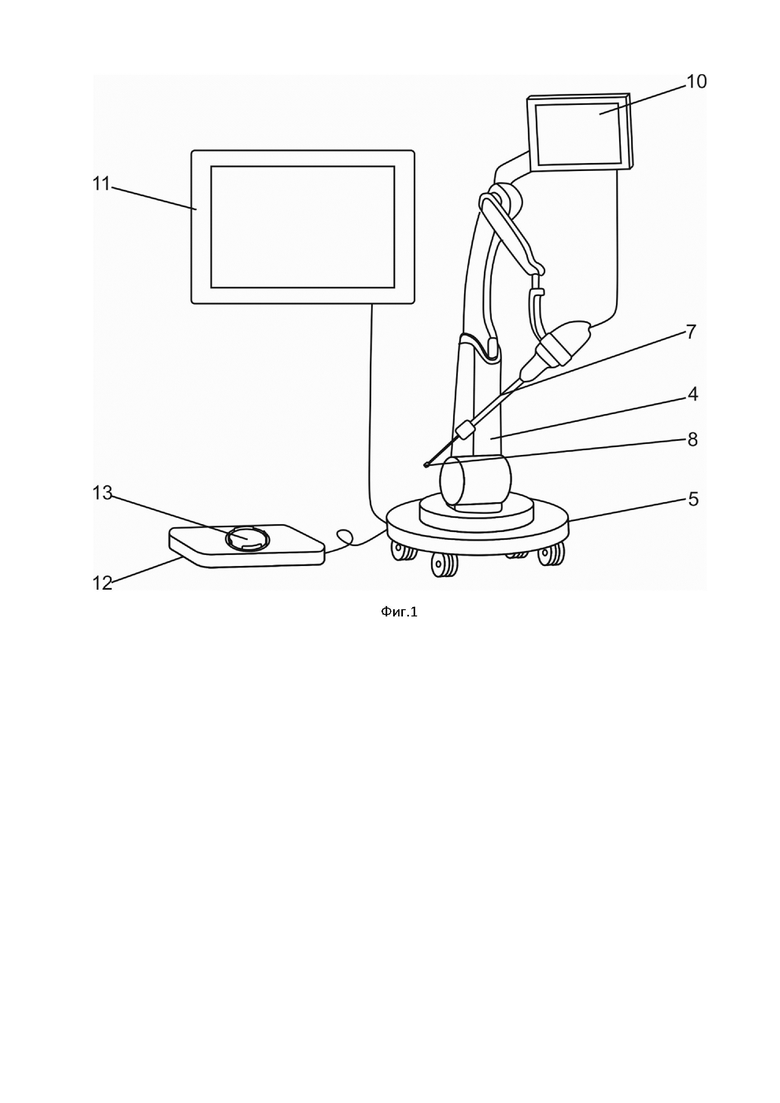
На фиг. 1 схематично показан хирургический работ.
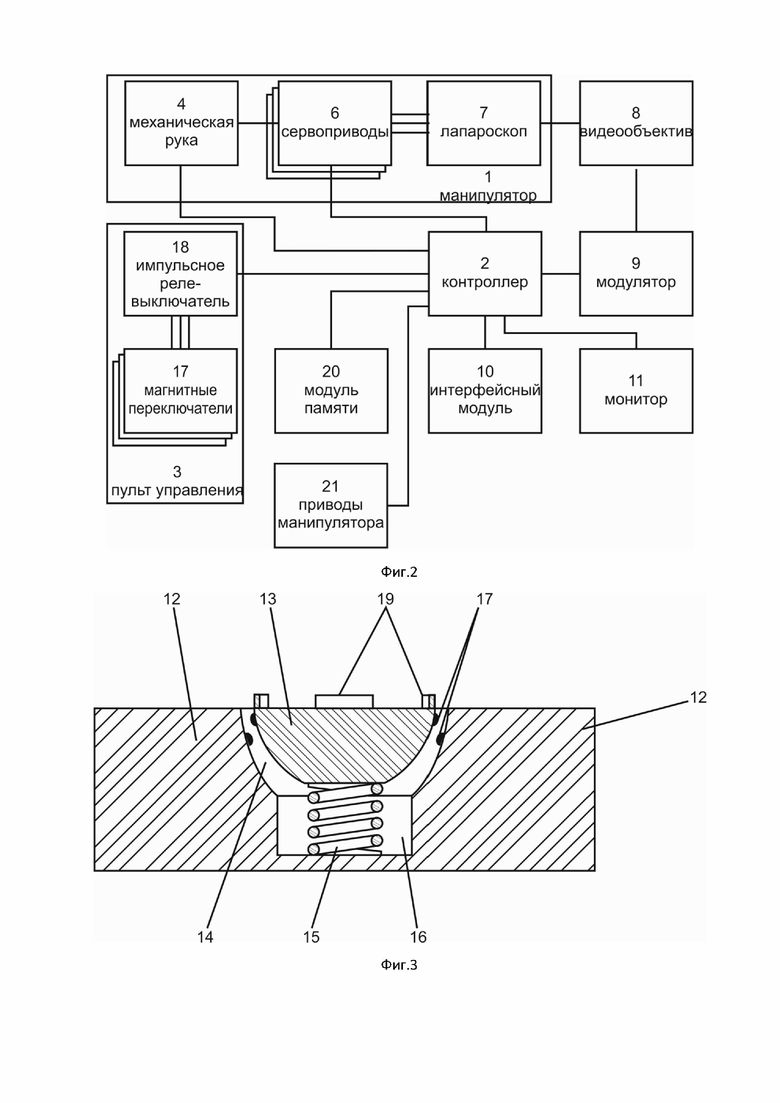
На фиг. 2 показана педаль управления хирургическим роботом.
На фиг. 3 показана блок-схема хирургического робота.
На фигурах обозначено: 1 - манипулятор, 2 - контроллер, 3 - пульт управления, 4 - механическая рука, 5 - подвижная платформа, 6 - сервоприводы, 7 - лапароскоп, 8 - видеообъектив, 9 - модулятор, 10 - интерфейсный модуль, 11 - монитор, 12 - платформа, 13 - педаль, 14 - ниша, 15 - пружина сжатия, 16 - колодец, 17 - магнитные переключатели, 18 - импульсное реле-выключатель, 19 - борта, 20 - модуль памяти, 21 - приводы.
Осуществление изобретения.
Идея рассматриваемого технического решения, заключается, во-первых, в улучшение исходов операционного лечения пациентов при инвазивной и малоинвазивной хирургии, а во-вторых, в повышении точности и оперативности выполнения инвазивных процедур за счет реализации в хирургии системы «человек-машина».
Согласно ГОСТ 26387-84 «Система "ЧЕЛОВЕК-МАШИНА". Термины и определения» под системой "человек-машина" понимается система, включающая в себя человека-оператора, машину, посредством которой он осуществляет трудовую деятельность, и среду на рабочем месте.
Внедрение упомянутой системы в данную область медицинской деятельности позволит сократить количество привлекаемых ассистентов для проведения простых инвазивных процедур, позволив высвободить их для выполнения других операций, что в итоге сократит дефицит данного персонала, являющегося значительной проблемой в медицинской отрасли.
Модель предлагаемой системы состоит в управляемом врачом, с помощью органов управления, воздействии на манипулятор 1 с лапароскопом 7, который в свою очередь передает трехмерную картинку происходящего в операционном поле.
Хирургический робот содержит подвижный манипулятор 1, контроллер 2 и пульт управления 3. Манипулятор 1 содержит механическую руку 4, смонтированную на подвижной платформе 5 и состоит из шарнирно соединенных между собой звеньев. Шарнирные соединения звеньев механической руки 4 снабжены приводами 21, выполненными, преимущественно, в виде электроприводов. Манипулятор 1 выполнен, как минимум, c пятью степенями свободы. На конце механической руки 4 на подвижной головке, снабженной сервоприводами 6 смонтирован держатель (на фигурах не показаны), в упомянутый держатель вставлен лапароскоп 7 с видеообъективом 8 на конце.
Видеообъектив 8 через модулятор 9 подключен к контроллеру 2, к которому подключены интерфейсный модуль 10, смонтированный на манипуляторе 1 и, по крайней мере, один монитор 11, размещенный в области зрения врача с возможностью визуального отображения на упомянутом мониторе 11 увеличенного изображения органов и/или тканей пациента в ходе проведения инвазивной процедуры. К контроллеру 2 подключен модуль памяти 20.
Интерфейсный модуль 10 выполнен с возможностью интерфейсного управления манипулятором 1, установкой его режимов работы, вывода информации о его работе и т.д.
К управляющим выходам контроллера 2 также подключены исполнительные механизмы, выполненные в виде сервоприводов 6.
Пульт управления 3 содержит платформу 12 и смонтированную в ней педаль 13. Педаль 13 выполнена в виде обращенной вниз полусферы, плоское основание которой выполнено с возможностью опоры на нее ноги врача. Упомянутая педаль 13 симметрично смонтирована в полусферической или овальной нише 14 в платформе 12, при этом между стенками ниши 14 и поверхностью педали 13 выполнен зазор. Педаль 13 упруго опирается на, по крайней мере одну пружину сжатия 15, смонтированную в цилиндрическом колодце 16, выполненном в продолжении ниши 14 упомянутой платформе 12.
На боковых стенках педали 13 у ее основания по крайней мере по квадрантам окружности смонтированы магнитные переключатели 17, выполненные в виде, например, герконовых переключателей. Ответные части упомянутых магнитных переключателей 17 смонтированы напротив, на боковых стенках ниши 14, ниже на расстояние, соответствующее величине деформации пружины сжатия 15.
Магнитные переключатели 17 через импульсное реле-выключатель 18 подключены к контроллеру 2. Подключение выполнено как проводным, в т.ч. оптическим, так и беспроводным, с использованием технологий беспроводной связи, способами. Импульсное реле-выключатель 18 выполнено с возможностью снятия напряжения с управляемой с помощью его электрической цепи (размыкания цепи) сервоприводов 6 через заданный промежуток времени.
На плоском основании педали 13 по краям смонтированы вертикально вверх борта 19, выполненные с возможностью обеспечения упора для ноги врача.
Устройство управления хирургическим роботом используют следующим образом.
Перед проведением хирургической операции, например, лапароскопии, размещают манипулятор 1 напротив врача, а монитор 11 возле правой ноги пациентки. Для врача-левши расстановку меняют на зеркальную.
Под правую или левую ногу врача размещают пульт управления 3 манипулятором 1, соблюдая при этом направление движения педали 13. Включают устройство и настраивают изображение, получаемое с видеообъектива 8 и транслируемое на монитор 11. Настройку изображения осуществляют как на мониторе 11, так и на интерфейсном модуле 10.
Далее с помощью интерфейсного модуля 10, управляя приводами 21 механической руки 4 манипулятора 1 через контроллер 2 подводят лапароскоп 7 к непосредственной близости с пациенткой.
Размещают на хирургическом столе и готовят пациентку. Через разрезы, сделанные в брюшной стенке, врач вводит в брюшную полость иглу Вереша, накладывает пневмоперитонеум, вводит троакар. Возможно введение троакара без предварительного наложения пневмоперитонеума. Сразу после введения в брюшную полость первичного троакара вводят лапароскоп 7. Производят обзорный осмотр органов брюшной полости.
Врач размещает правую или левую ногу на основании педали 13 пульта управления 3 и для управления сервоприводами 6 подвижной головки нажимает на центр педали 13 сверху, утапливая упомянутую педаль 13 в нишу 14 подвижной платформы 5, при этом при полном сжатии пружины сжатия 15 магнитные переключатели 17 смонтированные на поверхности педали 13 и их ответные части, смонтированные на стенках ниши 14 располагаются друг напротив друга, но за счет зазора между поверхностью педали 13 и стенками ниши 14, упомянутые части магнитных переключателей 17 в контакт между собой не входят.
Для дальнейшего управления вертикальным, горизонтальным или угловым перемещением лапароскопа 7 при нажатой вниз педали 13 врач ногой толкает педаль 13 вперед, назад, вправо или влево. При перемещении педали 13 замыкаются между собой соответствующие части магнитных переключателей 17 и подается сигнал на импульсное реле-выключатель 18, которое в свою очередь замыкает цепь на время, заданное в упомянутом реле-выключателе 18 и подает сигнал на вход контроллера 2, который в свою очередь после получения сигнала подает напряжение на соответствующий сервопривод 6 подвижной головки манипулятора 1, который изменяет положение держателя подвижной головки манипулятора 1 в той или иной плоскости, и соответственно положение лапароскопа 7 с видеообъективом 8 в брюшной полости. Через заданное время в импульсном реле-переключателе 18 его контакты размыкаются и подача напряжения на сервопривод 6 с контроллера 2 прекращается. За заданное в импульсном реле-выключателе 18 время связка сервопривод 6 - подвижная головка - захват - лапароскоп 7 - видеообъектив 8 совершает движение и останавливается. Для повторного изменения положения видеообъектива 8 врач повторно перемещает педаль 13. Изображение от видеообъектива 8 через модулятор 9 передают на контроллер 2, а с него, обработанное видеоизображение передают на монитор 11 и одновременно записывают в режиме реального времени в модуль памяти 20.
Для изменения времени подачи питания на сервоприводы 6 на корпусе подвижной платформы 5 может быть предусмотрена панель регулировки (на фигуре не показана) импульсного реле-выключателя 18.
Для устойчивого положения ноги врача на педали 13 по краю упомянутой педали 13 выполнены борта 19 в которые упирается нога врача при манипулировании педалью 13. Кроме того, поверхность педали 13 может быть покрыта покрытием с высокими сцепляющими свойствами, например, резиной.
Такое пошаговое изменение положения лапароскопа 7 обеспечивает возможность контроля врачом положения и точности перемещения видеообъектива 8. Кроме того, наличие в конструкции импульсного реле-переключателя 18 исключает непроизвольное перемещение лапароскопа 7 с видеообъективом 8 при более длительном нажатии врачом на педаль 13, что также обеспечивает точность управления лапароскопом 7 при выполнении хирургической операции.
Врач при выполнении операции управляет в том числе ногой лапароскопом 7 с видеообъективом, что уменьшает время на регулировку положения видеообъектива 8, исключая передачу команд ассистенту, время на уяснение команды ассистентом и время на выполнение манипуляции ассистентом. Цепочка «врач - видеообъектив - врач» в этом случае максимально короткая и связь между элементами этой цепочки наикратчайшая с наименьшей задержкой между сигналом мозга врача на выполнение движения ногой и движением. Координация между врачом и видеообъективом 8 лапароскопа 7 имеет огромное значение для успешного исхода вмешательства и профилактики осложнений. Любые манипуляции в полости - введение всех троакаров (кроме первого), введение и извлечение инструментов, фиксацию и освобождение органов, тракцию и противотракцию, рассечение и коагуляцию тканей, наложение лигатур и прошивание аппаратом, туалет, санацию полости и установку дренажей - выполняют под визуальным контролем.
| название | год | авторы | номер документа |
|---|---|---|---|
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| СПОСОБ УПРАВЛЕНИЯ КАМЕРОЙ В РОБОТОХИРУРГИЧЕСКОМ КОМПЛЕКСЕ | 2020 |
|
RU2721461C1 |
| Мехатронный модуль воздействия на педаль управления транспортно-технологического средства | 2022 |
|
RU2792709C1 |
| СИЛОВОЕ УСТРОЙСТВО К КОМПЬЮТЕРУ ДЛЯ УПРАВЛЕНИЯ ВИРТУАЛЬНЫМ САМОЛЕТОМ | 2012 |
|
RU2498833C1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ МАНИПУЛЯТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2720841C1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| КОМБИНИРОВАННЫЙ МАНИПУЛЯТОР РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2721485C1 |
| КОНФИГУРИРУЕМЫЙ МОБИЛЬНЫЙ РОБОТ | 2023 |
|
RU2821375C1 |
| ТРЕНАЖЕР МЕХАНИКА-ВОДИТЕЛЯ | 2023 |
|
RU2828735C1 |
| УНИФИЦИРОВАННЫЙ ПРОЦЕДУРНЫЙ ТРЕНАЖЕР ЛЕТНОГО И ТЕХНИЧЕСКОГО ПЕРСОНАЛА ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2279141C1 |
Изобретение относится к медицине, а именно к устройствам управления хирургическими роботами. Устройство содержит манипулятор и пульт управления. Пульт управления включает электромеханическую приводную часть, установленную на платформе-основании, и исполнительные механизмы, где каждый механизм обеспечивает перемещение по одной из заданных осей держателя хирургического инструмента. В качестве хирургического инструмента в держателе смонтирован лапароскоп с видеообъективом на конце, передающий изображение через модулятор и контроллер на монитор. Исполнительные механизмы и электромеханическая приводная часть подключены к контроллеру. Электромеханическая приводная часть выполнена в виде обращенной вниз полусферической педали, упруго смонтированной с помощью пружины сжатия в нише, выполненной в платформе-основании и снабжена импульсным реле-переключателем, выполненным с возможностью снятия напряжения с управляемой с помощью электромеханической части электрической цепи исполнительных механизмов через заданный промежуток времени. Электромеханическая часть содержит магнитные переключатели, смонтированные на боковых стенках у основания педали, ответные части которых смонтированы на стенках ниши таким образом, что оказываются напротив только при нажатой вниз педали. Между боковой поверхностью педали и стенками ниши выполнен зазор, исключающий самопроизвольный контакт частей магнитных переключателей, но с возможностью его преодоления и замыкания электрической цепи при перемещении врачом педали в одном из направлений. Достигается повышение точности и уменьшение времени задержки автоматизированного управления лапароскопом при выполнении хирургической операции. 4 з.п. ф-лы, 3 ил.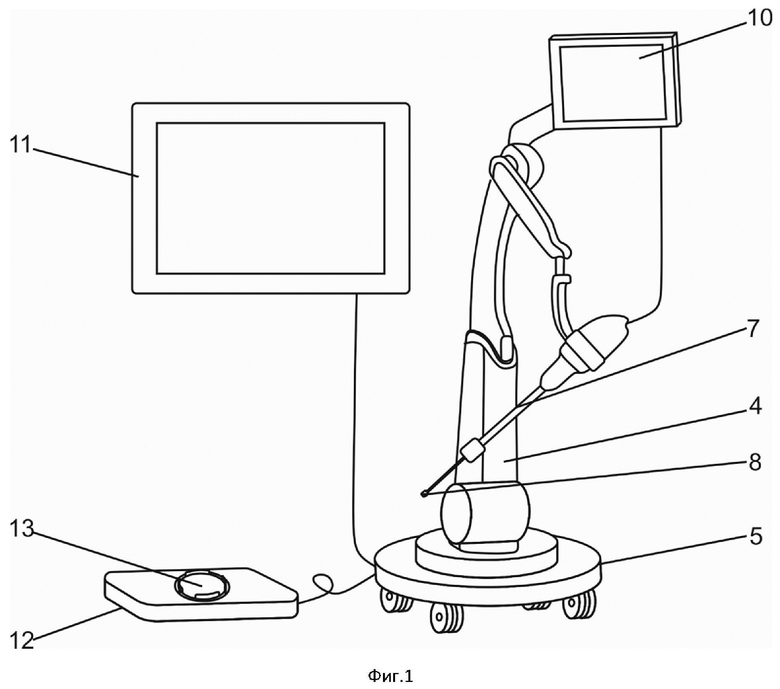
1. Устройство управления хирургическим роботом, содержащее манипулятор, пульт управления, включающий электромеханическую приводную часть, установленную на платформе-основании и исполнительные механизмы, где каждый механизм обеспечивает перемещение по одной из заданных осей держателя хирургического инструмента, отличающийся тем, что в качестве хирургического инструмента в держателе смонтирован лапароскоп с видеообъективом на конце, передающий изображение через модулятор и контроллер на монитор, исполнительные механизмы и электромеханическая приводная часть подключены к контроллеру, при этом электромеханическая приводная часть выполнена в виде обращенной вниз полусферической педали, упруго смонтированной с помощью пружины сжатия в нише, выполненной в платформе-основании и снабжена импульсным реле-переключателем, выполненным с возможностью снятия напряжения с управляемой с помощью электромеханической частью электрической цепи исполнительных механизмов через заданный промежуток времени, электромеханическая часть содержит магнитные переключатели, смонтированные на боковых стенках у основания педали, ответные части которых смонтированы на стенках ниши, таким образом, что оказываются напротив только при нажатой вниз педали, между боковой поверхностью педали и стенками ниши выполнен зазор, исключающий самопроизвольный контакт частей магнитных переключателей, но с возможностью его преодоления и замыкания электрической цепи при перемещении врачом педали в одном из направлений.
2. Устройство по п. 1, отличающееся тем, что манипулятор выполнен из шарнирно соединенных между собой звеньев.
3. Устройство по п. 1, отличающееся тем, что шарнирные соединения звеньев манипулятора снабжены приводами для их перемещения.
4. Устройство по п. 1, отличающееся тем, что магнитные переключатели выполнены в виде герконовых переключателей.
5. Устройство по п. 1, отличающееся тем, что на плоском основании педали по краям смонтированы вертикальные борта с возможностью обеспечения упора для ноги.
| DE 102019100883 A1, 16.07.2020 | |||
| СПОСОБ ИЗМЕРЕНИЯ ВНУТРЕННИХ УПРУГИХ НАПРЯЖЕНИЙ В ТВЕРДБ1Х ТЕЛАХ | 0 |
|
SU191867A1 |
| US 3970984 A1, 20.07.1976 | |||
| US 10864054 B2, 15.12.2020 | |||
| US 10799309 B2, 13.10.2020 | |||
| US 10747255 B2, 18.08.2020. | |||

