Механизмы, имеющие два ведомых звена, каждое из которых плраллельно перемещается по взаимно-перпендикулярным няпрлвлоииям на расстояния, пропорциональные для одного - синусу, а для другого-косинусу вводимого угла поворота, выполняются либо в форме сдвоенного кривошипно-олатунного механизма, недостатками которого являются использова1ние поступательных пар .и неравномерность момента сопротивления на входной оси, либб в форме объедншмии дпух механизмов, использующих для устранения указанных недостатков ii;iры качения, но решающих по отдельности задачу обеспечения парял лельности движения и задачу обеспечения пропорциональности перемещения синусу и косинусу.
В предлагаемом синусно-косинусном механизме обе указаипыо з;1 дачи решаются с помощью совмещенной Кинематнческои цепи л нар вращения, что приводит к значительному упрощению (умемьиюншо числа шестерен). Выполненный в виде планетарного механизм., он обеспечивает принудительный .поворот коромысла с ведомыми зиеиьпми относительно поводка, а самих ведомых звеньев - относитолмю коромысла.
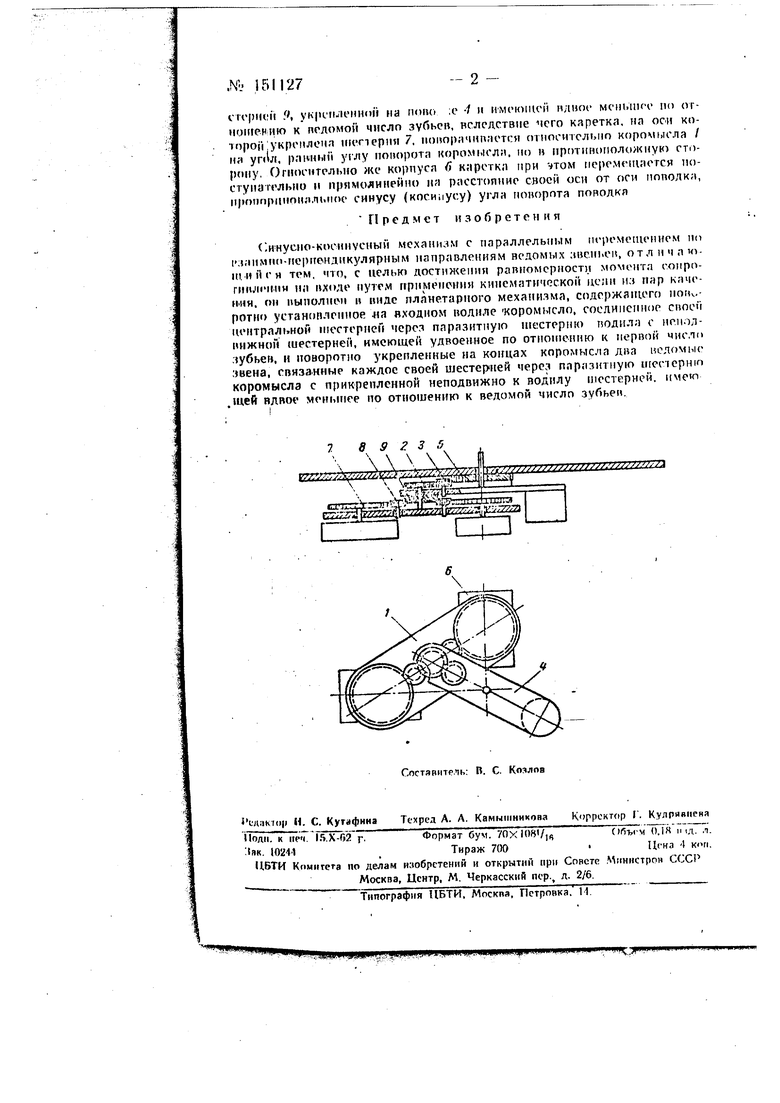
На чертеже приведена кинематическая схема описываемого eiriiye но-косинуачого механизма.
Синусно-косинусный механизм выполнен в виде планетарного ме ханизма, содержащего поворотно установленное на входном водилс коромысло /. На оси коромысла / укреплена центральная шестерня 2, Kvi торая через паразитную шестерню 3, установленную в поводке /, соедм йена с неподвижной шестерней 5, прикрепленной « корпусу 6. Неполвижная шестерня 5 имеет удвоенное по отиощеНИЮ к центральной пи-стерне 2 число зубьев, в результате чего коромысло / поиорачнпастсл относительно поводка 4 на двойной угол, а относительно корпуса 6 n.i угол, равный углу поворота поводка, но в противоТположпую сторону На концах коромысла 1 поворотно укреплены д.1а ведомых звена. Каждое из ведомых .звеньев своей щестернен 7 через паразитную шестср «ю 8 коромысла / связано с .прикрепленной неподвнжпо к подилу 
| название | год | авторы | номер документа |
|---|---|---|---|
| Корректирующее устройство с гибким лекалом для синусно-косинусного потенциометра плоского типа | 1950 |
|
SU100630A1 |
| Координатор | 1950 |
|
SU151126A1 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2620278C2 |
| ПРИВОД ПОВОРОТНОГО ЗАПОРНОГО ОРГАНА ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2001 |
|
RU2190144C1 |
| ПРИВОД ПОВОРОТА | 2007 |
|
RU2328442C1 |
| ПРИВОД КЛАПАНА КРАНОВОГО ТИПА И РУЧНОЙ ДУБЛЕР ПРИВОДА | 2000 |
|
RU2179681C2 |
| ИНВАЛИДНАЯ КОЛЯСКА | 2011 |
|
RU2475222C2 |
| КАРДАННО-ДИФФЕРЕНЦИАЛЬНЫЙ ВАРИАТОР | 2000 |
|
RU2202721C2 |
| Станок для обработки оптических деталей | 1979 |
|
SU998099A1 |
| Станок для обработки оптических деталей | 1987 |
|
SU1491671A1 |
