шение точности обработки малогабаритных оптических деталей путем уменьшения неуравновешенной массы планетарного механизма при уменьшении его диаметральных размеров. Станок для обработки оптических деталей содержит механизм автоматического регулирования эксцентриситета с пневмоприводом и датчиком 41 эксцентриситета и механизм планетарного перемещения поводка, вьшолненный в виде двух зубчатых редукторов, ведомый вал 17 первого из которых соединен с корпусом 19 второго редуктора и с крышкой 18, в боковом отверстии которой расположены опоры вала поводка 25, Вал поводка 25 несет шестерню 24, связанную при помощи промежуточного блока 22,
соогного 1си крышки 18, с центральной шестерней 20, установленной соосно оси ведомого вала 17, Ведомый вал 17 ВЕ.шолнен полым, в нем установлена крышка 18. Крышка 18 жестко соединена с корпусом второго редуктора. На корпусе 19 смонтирована коаксиально зубчатая муфта 26, Муфта 26 установлена с возможностью осевого перемещения относительно корпуса 19 и поочередного взаимодействия с ведомым валом и с промежуточным блоком 22, Блок 22 выполнен в виде шестерни с внутренними зубьями, предназначенными для зацепления с центральной шестерней 20. Вал шестерни 20 расположен в корпусе первого редуктора. 2 ил.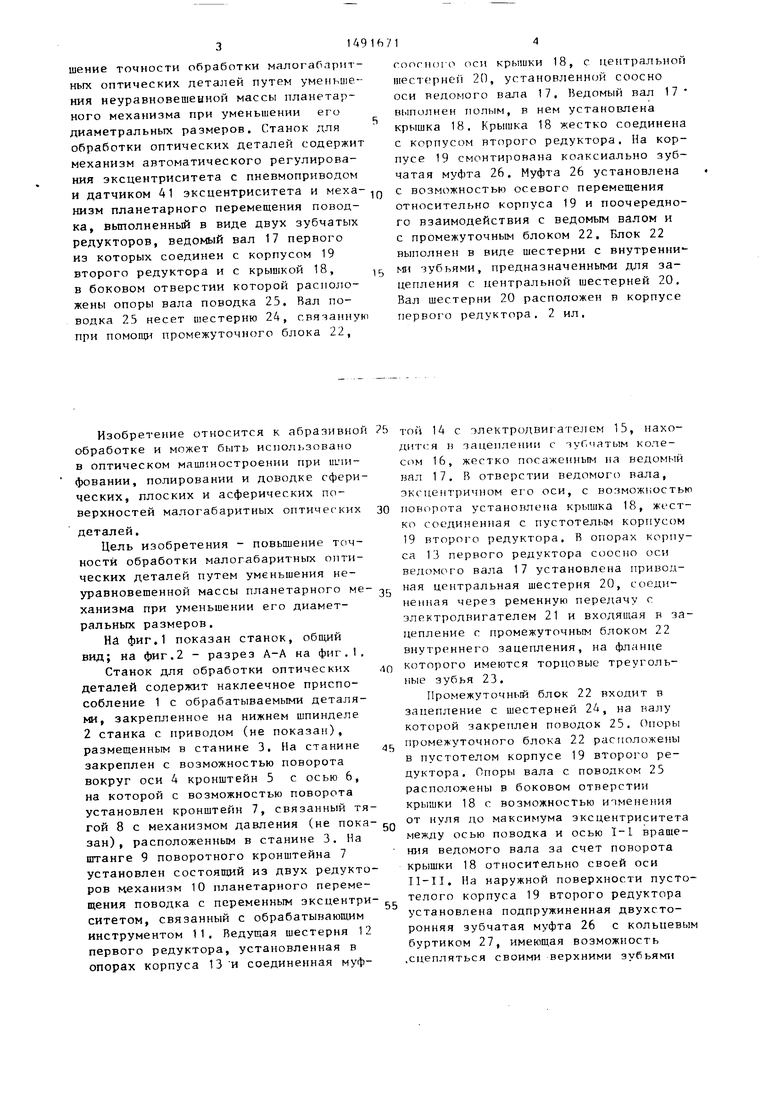
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для обработки оптических деталей | 1986 |
|
SU1340998A1 |
| Станок для обработки оптических деталей | 1983 |
|
SU1151430A2 |
| Станок для обработки оптических деталей | 1979 |
|
SU998099A1 |
| Станок для обработки оптических деталей | 1987 |
|
SU1496992A1 |
| Станок для обработки сферических поверхностей оптических деталей | 1985 |
|
SU1281380A1 |
| ПЛАНЕТАРНЫЙ ТОРЦОВЫЙ МОТОР-РЕДУКТОР | 1998 |
|
RU2150623C1 |
| МЕХАНИЗМ НАТЯЖЕНИЯ ГУСЕНИЦЫ С ЭЛЕКТРОПРИВОДОМ | 2011 |
|
RU2464198C1 |
| Электромеханический привод зажимного устройства | 1983 |
|
SU1235664A1 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2012 |
|
RU2506477C1 |
| СТАРТЕР ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2012 |
|
RU2490511C1 |
Изобретение относится к образивной обработке и может быть использовано в оптическом машиностроении при шлифовании, полировании и доводке сферических, плоских и асферических поверхностей малогабаритных оптических деталей. Цель изобретения - повышение точности обработки малогабаритных оптических деталей путем уменьшения неуравновешенной массы планетарного механизма при уменьшении его диаметральных размеров. Станок для обработки оптических деталей содержит механизм автоматического регулирования эксцентриситета с пневмоприводом и датчиком 41 эксцентриситета и механизм планетарного перемещения поводка, выполненный в виде двух зубчатых редукторов, ведомый вал 17 первого из которых соединен с корпусом 19 второго редуктора и с крышкой 18, в боковом отверстии которой расположены опоры вала поводка 25. Вал поводка 25 несет шестерню 24, связанную при помощи промежуточного блока 22, соосного оси крышки 18, с центральной шестерней 20, установленной соосно оси ведомого вала 17. Ведомый вал 17 выполнен полым и в нем установлена крышка 18. Крышка 18 жестко соединена с корпусом второго редуктора. На корпусе 19 смонтирована коаксиально зубчатая муфта 26. Муфта 26 установлена с возможностью осевого перемещения относительно корпуса 19 и поочередного взаимодействия с ведомым валом и с промежуточным блоком 22. Блок 22 выполнен в виде шестерни с внутренними зубьями, предназначенными для зацепления с центральной шестерней 20. Вал шестерни 20 расположен в корпусе первого редуктора. 2 ил.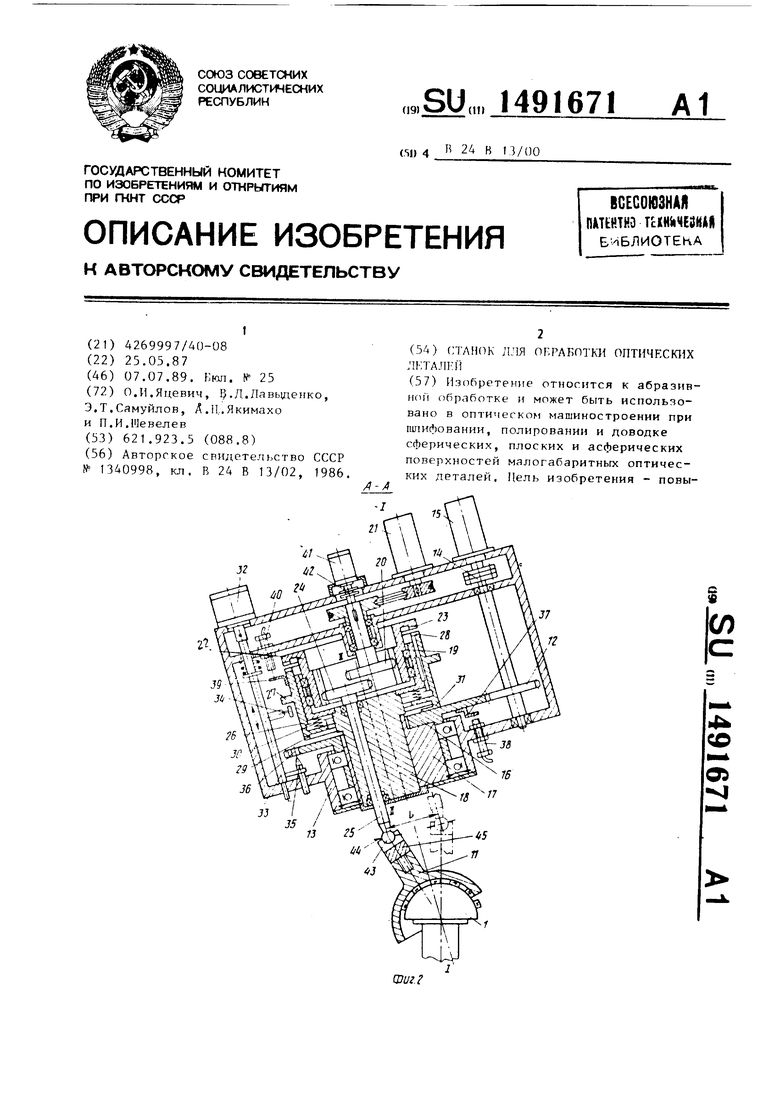
Изобретение относится к абразивной обработке и может быть использовано в оптическом машиностроении при uuin- фовании, полировании и доводке сферических, плоских и асферических поверхностей малогабаритных оптичегких
деталей,
Цель изобретения - повьш ение точности обработки малогабаритных оптических деталей путем уменьшения неуравновешенной массы планетарного механизма при уменьшении его диаметральных размеров.
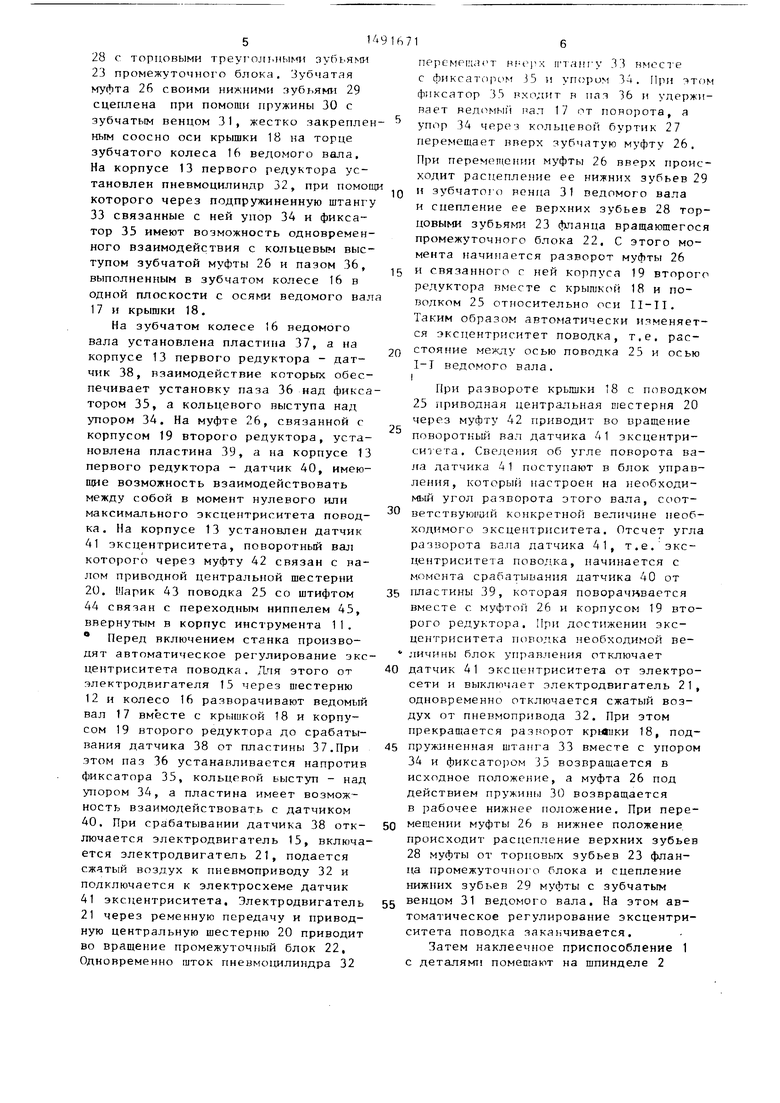
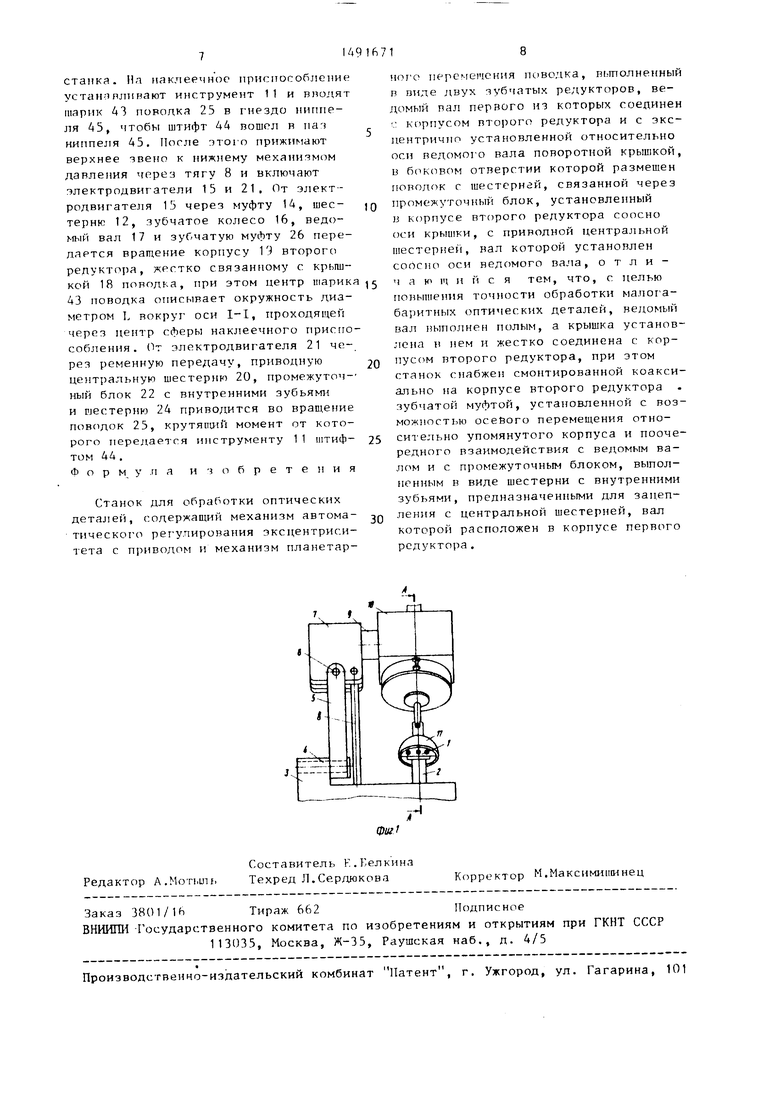
Ни фиг,1 показан станок, обший вид; на фиг.2 - разрез А-А на фиг.1.
Станок для обработки оптических деталей содержит наклеечное приспособление 1 с обрабатываемыми деталями, закрепленное на нижнем шпинделе 2 станка с приводом (не показан), размещенным в станине 3, На станине закреплен с возможностью поворота вокруг оси 4 кронштейн 5 с осью 6, на которой с возможностью поворота установлен кронштейн 7, связанный тягой 8 с механизмом давления (не показан) , расположенным в станине 3. На штанге 9 поворотного кронштейна 7 установлен состоящий из двух редукторов механизм 10 планетарного перемещения поводка с переменным эксцентриситетом, связанный с обрабатывающим инструментом 11, Ведущая шестерня 12 первого редуктора, установленная в опорах корпуса 13 и соединенная муфтой 14 с электродвигателем 15, находится н зацеплении с туГ.чатым колесим 16, жестко посаженным на ведомый вал 17. В отверстии ведомогсз вала, эксцентричном его оси, с возможностью
поворота установлена крышка 18, жестко соединенная с пустотелым корпусом 19 второго редуктора, В опорах корпуса 13 первого редуктора соосно оси ведомого вала 17 установлена приводная центральная шестерня 20, соединенная через ременную передачу с электродвигателем 21 и входящая в зацепление с промежуточным блоком 22 внутреннего зацепления, на фланце
которого имеются торцовые треугольные зубья 23,
Промежуточный блок 22 входит в зацепление с шестерней 24, на налу которой закреплен поводок 25. Опоры промежуточного блока 22 расположены в пустотелом корпусе 19 второго редуктора. Опоры вала с поводком 25 расположены в боковом отверстии крышки 18 с возможностью изменения от нуля до максимума эксцентриситета между осью поводка и осью 1-1 враше- кия ведомого вала за счет поворота крышки 18 относительно своей оси 11-11, На наружной поверхности пустотелого корпуса 19 второго редуктора установлена подпружиненная двухсторонняя зубчатая муфта 26 с кольцевым буртиком 27, имеющая возможность .сцепляться своими верхними зубьями
5
28 с торцовыми Tpeyrojii.HbiNfn зубьямм 23 промежуточного блока. Зубчатая муфта 26 своими нижними зубьями 29 сцеплена при помощи пружины 30 с зубчатым венцом 31, жестко закрепленным соосно оси крышки 18 на торце зубчатого колеса 16 ведомого вала, На корпусе 13 первого редуктора установлен пневмоцилиндр 32, при помощ которого через подпружиненную штангу 33 связанные с ней упор 34 и фиксатор 35 имеют возможность одновременного взаимодействия с кольцевым выступом зубчатой муфты 26 и пазом 36, выполненным в зубчатом колесе 16 в одной плоскости с осями ведомого вал 17 и крышки 18.
На зубчатом колесе 16 ведомого вала установлена пластина 37, а на корпусе 13 первого редуктора - датчик 38, взаимодействие которых обеспечивает установку паза 36 над фиксатором 35, а кольцевого выступа над упором 34. На муфте 26, связанной с корпусом 19 второго редуктора, установлена пластина 39, а на корпусе 13 первого редуктора - датчик 40, имеющие возможность взаимодействовать между собой в момент нулевого или максимального эксцентриситета поводка. На корпусе 13 установлен датчик 41 эксцентриситета, поворотный вал которого через муфту 42 связан с валом приводной центральной шестерни 20. Шарик 43 поводка 25 со штифтом 44 связан с переходным ниппелем 45, ввернутым в корпус инструмента 11. ° Перед включением станка производят автоматическое регулирование эксцентриситета поводка. Ятя этого от электродвигателя 15 через шестерню 12 и колесо 16 разворачивают ведомый вал 17 вместе с крышкой 18 и корпусом 19 второго редуктора до срабатывания датчика 38 от пластины 37.При этом паз 36 устанавливается напротив фиксатора 35, кольцевой выступ - над упором 34, а пластина имеет возможность взаимодействовать с датчиком 40. При срабатывании датчика 38 отк- хпочается электродвигатель 15, включается электродвигатель 21, подается сжатый воздух к пневмоприводу 32 и подключается к электросхеме датчик 41 эксцентриситета. Электродвигатель 21 через ременную передачу и приводную центральную шестерню 20 приводит во вращение промежуточный блок 22, Одновременно шток пневмои 1линдра 32
6716
перемРпи Х т Bi-rj -: н тангу 33 вместе с фиксаторс м 35 и упором 34. При этом фиксатор 35 Pxo;utT в паз 36 и удерживает вед(мы1 | пал 17 от поворота, а упор 34 через кольцевой буртик 27 перемещает вверх зубчатую муфту 26. При перемегцении муфты 26 вверх происходит расцепление ее нижних зубьев 29
Q и зубчатого венца 31 ведомого вала и спепление ее верхних зубьев 28 торцовыми зубьями 23 фланца вращающегося промежуточного блока 22. С этого момента начинается разворот муфты 26
5 и связанного с ней корпуса 19 второго редуктора вместе с крышксп 18 и поводком 25 относительно оси II-II. Таким образом автоматически изменяется эксцентриситет поводка, т.е. рас0 стояние между осью поводка 25 и осью
1-1 ведомого вала. I
При развороте крьшки 18 с поводком
25 приводная центральная иестерня 20 через муфту 42 приводит во вращение поворотный вал датчика 41 эксцентриситета. об угле поворота вала датчика 41 поступают в блок управления, который настроен на }1еобходи- угол разворота этого вала, соот0 ветствуюнцп конкретной величине необходимого эксцентриситета. Отсчет угла разворота вадта датчика 41, т.е. эксцентриситета поводка, начинается с момента срабатывания датчика 40 от
5 пластины 39, которая поворачивается вместе с муфтой 26 и корпусом 19 второго редуктора. При достижении эксцентриситета поводка необходимой ве- личины блок управления отключает
0 датчик 41 экспентриситета от электросети и выключает электродвигатель 21, одновременно отключается сжатый воздух от пневмопривода 32. При этом прекращается разгюрот крьвики 18, под5 пружиненная штанга 33 вместе с упором 34 и фиксато1)ом 35 возвращается в исходное положение, а муфта 26 под действием пружинь 30 возвращается в рабочее нижнее положение. При пере0 мещении муфты 26 в нижнее положение происходит расцепление верхних зубьев 28 муфты от торповьгх зубьев 23 фланца промежуточного блока и сцепление нижних зубьев 29 муфты с зубчатым
g венцом 31 ведомого вала. На этом автоматическое регулирование эксцентриситета поводка заканчивается.
Затем наклеечное приспособление 1 с деталями помещают на шпинделе 2
станка. На маклеечнос приспособление ус та но пли ria ют инструмент 11 и вподят шарик 43 породка 25 в гнездо ниппеля 45, чтобы штифт 44 пошел R пач ниппеля 45, После этого прижимают верхнее звено к механигэмом давления чорез тягу 8 и включают электродвигатели 15 и 21, От электродвигателя 15 через муфту 14, шее- терню 12, зубчатое колесо 16, ведомый вал 17 и зубчатую муфту 26 передается вращение корпусу 19 второго редуктора, жестко связанному с крышкой 18 поводка, при этом центр шарик 43 поводка описывает окружность диаметром L вокруг оси I-I, проходящей через центр сферы наклеечного приспособления, (1т электродвигателя 21 через ременную передачу, приводную центральную шестерню 20, промежуточный блок 22 с внутренними зубьями и шестерню 24 приводится во вращение поводок 25, крутяпшй момент от которого передается инструменту 11 штиф- том 44, Ф о р м у .п а изобретения
Станок для обработки оптических деталей, содержащий механизм автома- тичecкoг( регулирования эксцентриситета с приводом и механизм планетарного перемещения поводка, вьтолненный в виде двух зубчатых редукторов, ведомый вал первого из которых соединен с корпусом второго редуктора и с эксцентрично установленной относительно оси ведомого вала поворотной крышкой, в бок(твом отверстии которой размешен поводок с шестерней, связанной через промежуточный блок, установленный в корпусе второго редуктора соосно оси крьш1ки, с приводной центральной iiiecTepneii, над которой установлен сооою оси ведомого вала, о т л и - ч а ю 1Ц и и с я тем, что, с целью повышения точности обработки малогабаритных оптических деталей, ведомый вал 1 ыполнен полым, а крышка установлена и нем и жестко соединена с корпусом второго редуктора, при этом станок снабжен смонтированной коакси- ально на корпусе второго редуктора . зубчатой муфтой, установленной с возможностью осебого перемещения относительно упомянутого корпуса и поочередного взаимодействия с ведомым валом и с промежуточным блоком, выполненным в виде шестерни с внутренними зубьями, предназначенными для задеп- ления с центральной шестерней, вал которой расположен в корпусе первого редуктора .
| Станок для обработки оптических деталей | 1986 |
|
SU1340998A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
| Способ образования коричневых окрасок на волокне из кашу кубической и подобных производных кашевого ряда | 1922 |
|
SU32A1 |
