25 Ik г
АЛ.; ..
/ТУТ// XXJ У .
ШУ//О
у } Х 7 /у
315114
Изобретение относится к машино- строению, в частности к средствам пневмогидроавтоматики, и может быть использовано в качестве силового исполнительного механизма промьшлен- ного робота.
Целью изобретения является повышение быстродействия, надежности и улз 1шение эксплуатационных свойств ю привода.
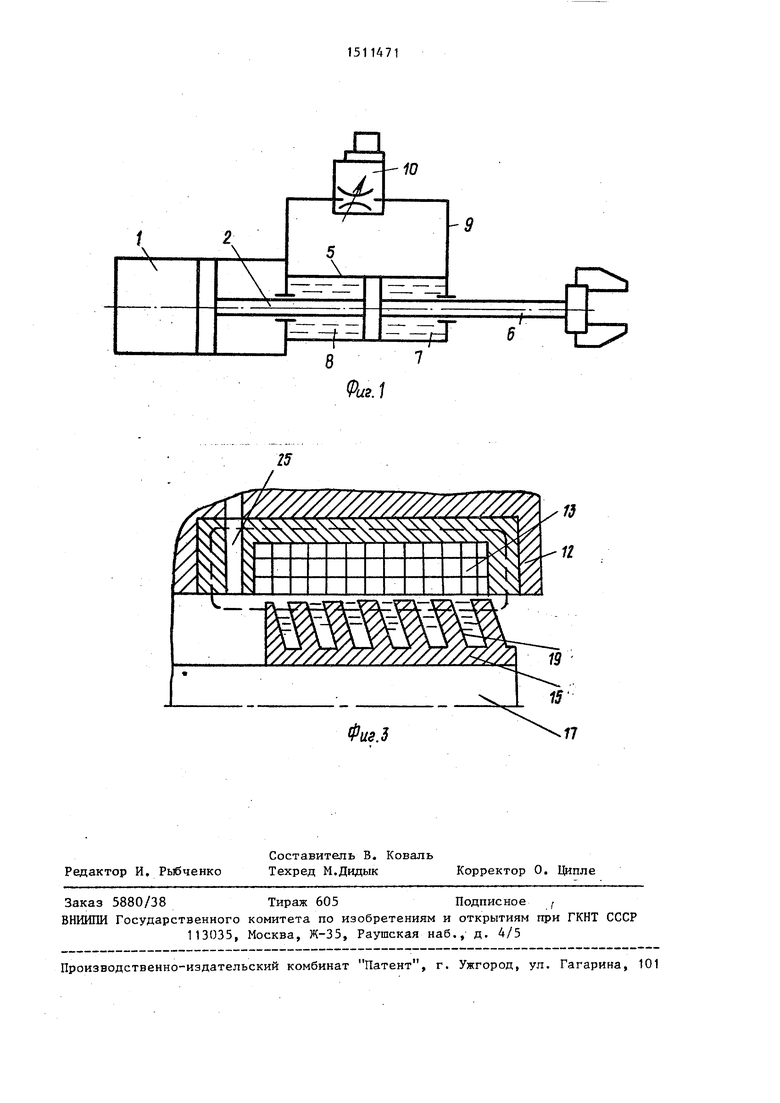
На фиг, 1 дана принципиальная схема привода, на фиг, 2 - схема регулирующего устройства на фиг, 3 - регулирующее .устройство, сечение, 15
Следящий позиционный привод (фиг, 1,2) содержит блок управления (БУ), исполнительный пневмоцилиндр 1 со штоком 2, датчики 3 и 4 обратной свя- зи по положению и скорости, демпфи- 20 рующее устройство, включающее гидроцилиндр 5, шток 6 которого связан со штоком 2, а полости 7 и 8 сообщены между собой через перепускной канал 9 и регулирующее устройство 25 10, выполненное в виде управляемого золотника 11, расположенного в корпусе 12, в котором, кроме того, размещены индукторы 13 и 14 магнитного поля, внутри которых расположены 30 шнеки 15 и 16, изготовленные из ферромагнитного материала и установл.ен- ные на немагнитном валу 17, соединенном с вращательным электроприводом 18, причем шнеки 15 и 16 выпол- з5 нены с противоположно направленными углами подъема винтовых каналов 19 (фиг, 3),
Статически уравновешенный золотник 11 отделен от его управляющих 40 камер 20 и 21 взаимодействующими с ними мембранами 22 и 23, Управляю- ЩЛ& камеры 20 и 21 соеди нены с расходной камерой 24 через магниторео- логические щелевые дроссели 25 и 26, 5 Корпус 12 заполнен ферромагнитной жидкостью.
Устройство работает следующим образом.
Электропривод 18 приводит во вращение с постоянной скоростью шнеки 15 и 16, При отсутствии управляющего сигнала (тока в обмотках возбуждения индукторов 13 и 14) ферромагнитная жидкость из расходной камеры 24 по- -г дается шнеком 16 в управляющую камеру 21, а шнеком 15 - в управляющую камеру 20, Из камеры 21 через магни- тореологический дроссель 25, а из
50
0 5 0 5
0 5
г
0
714
камеры 21 через дроссель 26 жидкость снова поступает в камеру 24, При появлении тока в обмотке возбуждения одного из индукторов, например индуктора 13, возникает магнитное поле, при определенной величине которого сила магнитного взаимодействия прочно удерживает ферромагнитную жидкость в винтовом канале 19 шнека 15 (шнек превращается во вращаюш ийся цилиндр), В этом случае подача ферромагнитной жидкости из расходной камеры 24 в управляющую камеру 20 отсутствует. Одновременно при появлении магнитного поля происходит прямо пропорциональное запирание щелевого дросселя 25 и расход жидкости из камеры 21 в камеру 24 прекращается. Это приводит к быстрому увеличению давления в камере 21 за счет подачи жидкости шнеком 16 из камеры 20 через открытый дроссель 26 в камеру 21, При воздействии давления на мембрану 23 возникает смещающее усилие, приложенное к золотнику 11 , Перемещение вьгход- ного штока 2 привода происходит при подаче возц,-уха под давлением в одну из полостей пневмоцилиндра 1, При этом происходит переток жидкости по каналу 9 между полостями 7 и 8 через управляемый золотник 11, В процессе перемещения в БУ происходит сравнение сигналов, поступающих от датчиков 3 и 4, с заданными и вырабатываются соответствующие управляющие сигналы, поступаюш;ие на обмотки возбуждения индукторов 13 и 14, в соответствии с которыми меняется величина магнитного поля каждого индуктора 13 и 14, баланс расхода ферромагнитной жидкости из камеры 24 в управляющее камеры 20 и 21 и баланс давлений в этих камерах 20 и 21, под действием которого происходит смещение золотника 11, что приводит к изменению живого сечения канала 9 и изменению скорости перемещения выходного штока 6, При полном перекрытии канала 9 происходит позиционирование привода.
Таким образом, предлагаемый привод позволяет осуществлять изменение скорости перемещения выходного штока 6 по заданному закону как при разгоне, так и при торможении, выдерживать заданную скорость перемещения, осуществлять позипкониро5
вание выходного штока в любой точке траектории перемещения. Наличие двух управляющих камер 20 и 21, а также двух дросселей 25 и 26, соединяющих их с расходной камерой 24, обеспечивает быстрое изменение баланса давлений и усилий, воздействующих на золотник 11. Наличие мембран 22 и 23 позволяет значительно увеличить полезную площадь, на которую воздействует давление, создаваемое в управляющих камерах 20 и 21, и достигнуть нужной динамики и величины перемещения золотника 11 при меньших значениях давлений в управляющих камерах 20 и 21 и следовательно, при меньшем диапазоне изменения управляющего сигнала (тока в обмотках возбуждения), что значительно повышает чувствительность и быстродействие регулирующего устройства предлагаемого привода. Кроме того, наличие мембран 22 и 23 гарантирует защиту золотниковой пары от возможного попадания частиц твердой фракции ферромагнитной ж:идкости между золотником 11 и корпусом 12, а также позволяет использовать в гидроконтуре гидроцилиндра 5 любую жидкость, традиционно применяемую в гидроустройствах, что повышает надежность и улучшает эксплуатационные харак - теристики предлагаемого приво - да.
Таким образом, возможности предлагаемого устройства позволяют использовать его в качестве привода различных технологических машин и оборудования, к динамике и точности позиц юнирования которых предъявляются повышенные требования.
0
5
0
14716.
Формула изобретения Следяашй позиционный привод, содержащий блок управления, исполнительный пневмо1Д1линдр со штоком,дат- чики обратной связи по положению и скорости штока, подключенные к блоку управления, демпфирующее устройство, включающее гидроцилиндр, шток которого жестко связан со штоком пневмоцилиндра, а полости сообщены между собой через перепускной канал, и регулирующее устройство, выполненное в виде управляемого золотника, расположенного в корпусе с возможностью перекрытия перепускного канала и образующего расходную камеру шнека, связанного с валом электропривода и охваченного индуктором магнитного поля, подключенного к блоку управления, при этом корпус регулир тощего устройства вьшолнен из немагнитного материала и заполнен ферромагнитной жидкостью, а расходная камера свя5 зана с управляющей камерой золотника, отличающийся тем, что, с целью повьш1ения быстродействия, надежности и улучшения эксплуатационных свойств привода, регулиQ рующее устройство снабжено двумя маг- Iнитореологическими щелевыми дросселями и дополнительныь: шнеком, охваченным дополнительным индуктором магнитного поля и жестко связанным с валом электропривода, а золотник вы полнен с второй управляющей камерой, при этом дополнительный индуктор подключен к блоку управления, шнеки выполнены с противоположно направленными углами подъема винтовых поверхностей, а управляющие камеры золотника сообщены с расходной камерой через щелевые дроссели.
0
jS
И:
10
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционный следящий привод | 1986 |
|
SU1399522A1 |
| Регулятор давления с электрическим управлением | 1986 |
|
SU1317406A1 |
| КООРДИНАТНЫЙ СТОЛ | 1992 |
|
RU2029447C1 |
| Ванна для закалки листового стекла | 1988 |
|
SU1813749A1 |
| Следящий позиционный пневмогидропривод | 1988 |
|
SU1527420A1 |
| Способ уплотнения цилиндропоршневой группы двигателя внутреннего сгорания и устройство для его осуществления | 1984 |
|
SU1237782A1 |
| ДВИГАТЕЛЬНАЯ УСТАНОВКА | 2000 |
|
RU2190115C2 |
| Активное виброгасящее устройство | 1990 |
|
SU1803638A1 |
| Защитное устройство с тарельчатыми клапанами | 2020 |
|
RU2761125C1 |
| Способ резки материалов | 1991 |
|
SU1819760A1 |
Изобретение относится к средствам пневмогидроавтоматики и может быть использовано в качестве силового исполнительного механизма промышленного робота. Целью изобретения является повышение быстродействия, надежности и улучшение эксплуатационных свойств привода. Смещение золотника 11 приводит к изменению живого сечения канала 9 и изменению скорости перемещения штока. При полном перекрытии канала 9 происходит позиционирование привода. Перемещение золотника 11 достигается подачей сигнала управления на один из индукторов 13, 14, в соответствии с которым меняется величина магнитного поля и баланс расхода ферромагнитной жидкости (ФМЖ) из камеры 24 в управляющие камеры 20, 21, соответственно и баланс давлений в последних. Мембраны 22, 23 гарантируют защиту золотниковой пары от возможного попадания частиц ФМЖ и увеличивают эффективную площадь, на которую воздействует перепад в камерах 20, 21. 3 ил.
f
ZT
87
Фиг.1
Физ.З
ZT T
IS
11
| Позиционный следящий привод | 1986 |
|
SU1399522A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
