а
оо со
(
сл to ts:)
Изобретение относится к гидроавто-- матике и может быть использовано в конструкциях станков с программным управлением и промышленных роботах.
Цель изобретения - повышение быстродействия и точности.
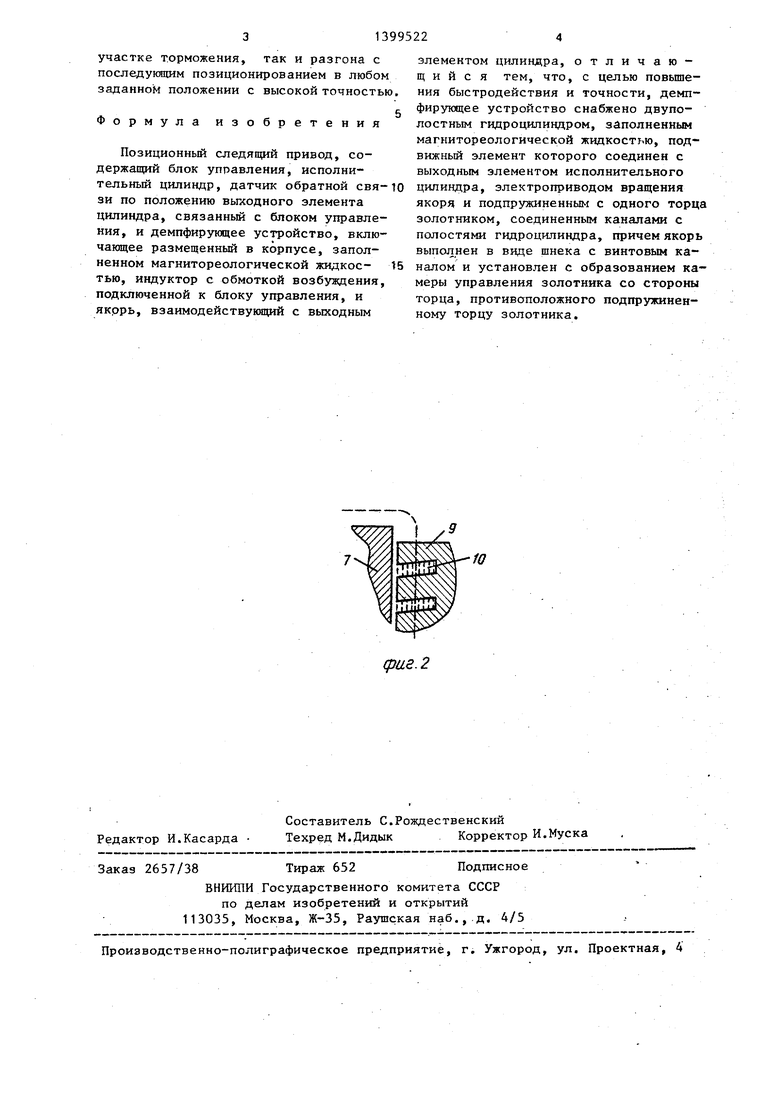
На фиг,1 изображен позиционный следящий привод; на фиг.2 - винтовой канал шнека.
Позиционный следящий привод содержит блок 1 управления, исполнительный цилиндр 2, датчик 3 обратной связи по положению выходного элемента 4 цилиндра 2 и датчик 5 скорости элемен- та 4, связанные с блоком 1, а также Демпфирующее устройство, включающее размещенньш в корпусе 6, заполненном магнитореологической жидкостью, индуктор 7 с обмоткой 8 возбуждения, подключенной к блоку 1, якорь, выполненный в виде шнека 9 из ферромагнитного материала с винтовым каналом 10, двуполостный гидроцилиндр 11, заполненный магнитореологической жидкое- тью, подвижньй элемент 12 которого соединен с элементом 4, электропривод 13 вращения шнека 9 и подпружиненный Пружиной 14 с одного торца (не обозначен) золотник 15, соединенный ка- налами 16 и 17 с полостями 18 и 19 Гидроцилиндра 11, причем шнек 9 установлен с образованием камеры 20 управления золотника 15 со стороны торца, противоположного подпружиненному торцу золотника 15. Последний размещен во втулке 21. Гидроцилиндр 11 имеет поршень 22. В корпусе 6 имеется полость 23, соединенная осевым отверстием 24, выполненным в золотнике 15, с камерой 20. Цилиндр 2 имеет рабочие полости (не обозначены) для подачи рабочей среды, например сжатого воз- духа „
снова поступастие 24 в золотнике 15 ет в полость 23,
При появлении управляющего сигнала (тока в обмотке 8 возбуждения индуктора 7) возникает магнитное поле (обозначено пунктиром на фиг.2), при оп- ределенной величине которого сила магнитного взаимодействия прочно удерживает магнитореологическую жидкость в винтовом канале 10 шнека 9 (последний превращается во вращающийся цилиндр). В этом случае подача жидкости из полости 23 в камеру 20 отсутствует.
При уменьшении управляющего сигнала сила магнитного взаимодействия магнитореологической жидкости с рабочей поверхностью шнека 9 ослабевает и появляется ее подача в камеру 20. При определенной разности раеходов из полости 23 в камеру 20 и из камеры 20 через отверстие 24 в полость 23, в камере 20 возникает давление, под действием которого золотник 15 перемещается вниз (см. фиг.). При этом происходит дросселирование магнитореологической жидкости в золотнике 15.
На участке демпфирования в блоке 1 происходит сравнение показаний датчиков 3 и 5 с заданными и формируется управляющий сигнал, характер которого определяет закон перемещения золотника 15, а следовательно, закон демпфирования привода и его позиционирования в заданном положении при полном перекрытии каналов 16 и 17. Пружина 14, наличие которой обеспечивает линейньш характер зависимости между изменением давления в камере 20 и перемещением золотника 15, при уменьшении давления в камере 20 смещает золотник 15 вверх (см. фиг.). При этом
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий позиционный привод | 1987 |
|
SU1511471A1 |
| МАГНИТОУПРАВЛЯЕМАЯ ГИДРАВЛИЧЕСКАЯ ВИБРООПОРА | 2018 |
|
RU2695472C1 |
| МАГНИТОУПРАВЛЯЕМАЯ ГИДРАВЛИЧЕСКАЯ ВИБРООПОРА И СПОСОБ НАСТРОЙКИ ОПТИМАЛЬНОГО РЕЖИМА ЕЁ РАБОТЫ | 2020 |
|
RU2744257C1 |
| Регулятор давления с электрическим управлением | 1986 |
|
SU1317406A1 |
| КООРДИНАТНЫЙ СТОЛ | 1992 |
|
RU2029447C1 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С КОМБИНИРОВАННЫМ РЕГУЛИРОВАНИЕМ СКОРОСТИ ВЫХОДНОГО ЗВЕНА И КЛАПАНОМ ДЕМПФИРОВАНИЯ | 2011 |
|
RU2483978C2 |
| ДВУХРЕЖИМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С ДОПОЛНИТЕЛЬНЫМИ РЕЖИМАМИ КОЛЬЦЕВАНИЯ И ДЕМПФИРОВАНИЯ ВЫХОДНОГО ЗВЕНА | 2011 |
|
RU2483977C2 |
| МНОГОФУНКЦИОНАЛЬНОЕ СЦЕПНОЕ УСТРОЙСТВО ПРИЦЕПА | 2015 |
|
RU2613140C2 |
| Гидропривод рабочего оборудования фронтального погрузчика | 1989 |
|
SU1680887A1 |
| ГИДРАВЛИЧЕСКАЯ ВИБРООПОРА | 2009 |
|
RU2407929C1 |
Изобретение может быть использовано в станках с программным управлением и промышленных роботах. Цель изобретения - повышение быстродействия и точности привода. Демпфирующее устройство содержит корпус 6, заполненный магнитореоло гической жидкостью, размещенный в корпусе индуктор 7 с обмоткой 8 возбуждения, подключенной к блоку 1 управления, якорь, выполненный в виде шнека 9 из ферромагнитного материала с винтовым каналом, двуполостный гидроцилиндр (ГЦ) 11, также заполненный магнитореологичес- кой жидкостью. Подвижный элемент 12 ГЦ 11 соединен с выходным элементом 4 исполнительного ГЦ 2, а полости 18 и 19 ГЦ 11 соединены каналами с подпружиненным золотником 15. Золотник 15 размещен во втулке 21 и со стороны его неподпружиненного торца установлен шнек 9 с образованием камеры 20 управления. Шнек 9 приводится во вращение электроприводом 13. В приводе обеспечивается отслеживание заданной скорости перемещения, изменение ее по заданному закону с последующим позиционированием в заданном положении. 2 шт. с 
Позиционный следящий привод рабо- 45 лы 16 и 17 соединяются, и привод
тает следующим образом.
При подаче сжатого воздуха в одну из полостей цилиндра 2 элемент 4 начинает движение в заданном направлении, например, вправо (см, фиг.). При этом жидкость из полости 19 гидроцилиндра 11 вытесняется поршнем 22 в полость 18 через перепускные каналы 16 и 17. Шнек 9 приводится во вращение с постоянной скоростью электро- гфиводом 13. При этом магнитореологи- ческая жидкость циркулирует по замкнутому контуру. Из полости 23 она подается в камеру 20 и через отвер0
5
продолжает движение в заданном направлении.
При выравнивании усилий перемещения, приложенных к золотнику 15, происходит его стабилизация в любом заданном промежуточном положении, которому соответствуют определенная величина расхода между полостями гидроцилиндра 11 и заданная величина скорости перемещения выходного элемента 4.
Таким образом, в предлагаемом приводе обеспечивается отслеживание заданной скорости перемещения, измене - ние ее по заданному закону как на
участке торможения, так и разгона с последуклцим позиционированием в любом заданном положении с высокой точностью
Формула изобретения
Позиционный следящий привод, содержащий блок управления, исполнительный цилиндр, датчик обратной связи по положению выходного элемента цилиндра, связанный с блоком управления, и демпфирующее устройство, включающее размещенный в корпусе, заполненном магнитореологической жидкое- тью, индуктор с обмоткой возбуждения, подключенной к блоку управления, и якррь, взаимодействующий с выходным
элементом цилиндра, отличающийся тем, что, с целью повьппе- ния быстродействия и точности, демпфирующее устройство снабжено двуполостным гидроцилиндром, заполненным магнитореологической жидкостью, подвижный элемент которого соединен с выходным элементом исполнительного цилиндра, электроприводом вращения якоря и подпружиненным с одного торца золотником, соединенным каналами с полостяьш гидроцилиндра, причем якорь выполнен в виде шнека с винтовым каналом и установлен с образованием камеры управления золотника со стороны торца, противоположного подпрутшнен- ному торцу золотника.
(рае. 2
| Позиционный привод | 1978 |
|
SU750144A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
