6
сл
4;
N9
вых муфт, взаимодействующих с электродвигателем. Муфты кинематически связаны с электродвигателем таким образом, что вращаются в противоположные стороны относительно рейки, Использование муфт, обладающих широким диапазоном изменения крутящего
момента и высоким быстродействием, а также схема их взаимодействия с золотником и электродвигателем, обеспечивающая беззазорный характер зубчатого зацепления, позволяет значительно повысить быстродействие и точность регулирования. 4 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для обработки концов труб | 1982 |
|
SU1065088A1 |
| ГИДРОСИСТЕМА СИНХРОНИЗАЦИИ ДВУХ СЕРВОМЕХАНИЗМОВ | 2000 |
|
RU2192567C2 |
| УСТРОЙСТВО ДЛЯ МНОГОРУЧЬЕВОГО ЛИТЬЯ ПРУТКОВЫХ ЗАГОТОВОК | 1995 |
|
RU2084312C1 |
| Механизм вертикального перемещения грузоподъемника крана-штабелера | 1989 |
|
SU1677020A1 |
| ИМПУЛЬСНАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2002 |
|
RU2240455C2 |
| ПРИВОД СТЕРЖНЯ АВАРИЙНОЙ ЗАЩИТЫ | 2013 |
|
RU2566299C2 |
| Моментный позиционный пневмогидропривод | 1987 |
|
SU1455062A1 |
| Устройство для регулирования угла опережения впрыскивателя топлива в дизель | 1989 |
|
SU1740753A1 |
| ГИДРОГАЗОДИНАМИЧЕСКИЙ ДВИГАТЕЛЬ | 1999 |
|
RU2167308C1 |
| Привод подачи сверлильного станка | 1979 |
|
SU917958A1 |
Изобретение может быть использовано в качестве исполнительного механизма промышленного робота. Цель изобретения - улучшение динамических характеристик и расширение эксплуатационных возможностей привода. Управляющее устройство золотника, установленного в перепускном канале 15 полостей 9, 10 гидроцилиндра 8, выполнено в виде блока двух электромагнитных порошковых муфт, взаимодействующих с электродвигателем. Муфты кинематически связаны с электродвигателем таким образом, что вращаются в противоположные стороны относительно рейки. Использование муфт, обладающих широким диапазоном изменения крутящего момента и высоким быстродействием, а также схема их взаимодействия с золотником и электродвигателем, обеспечивающая беззазорный характер зубчатого зацепления, позволяет значительно повысить быстродействие и точность регулирования. 4 ил.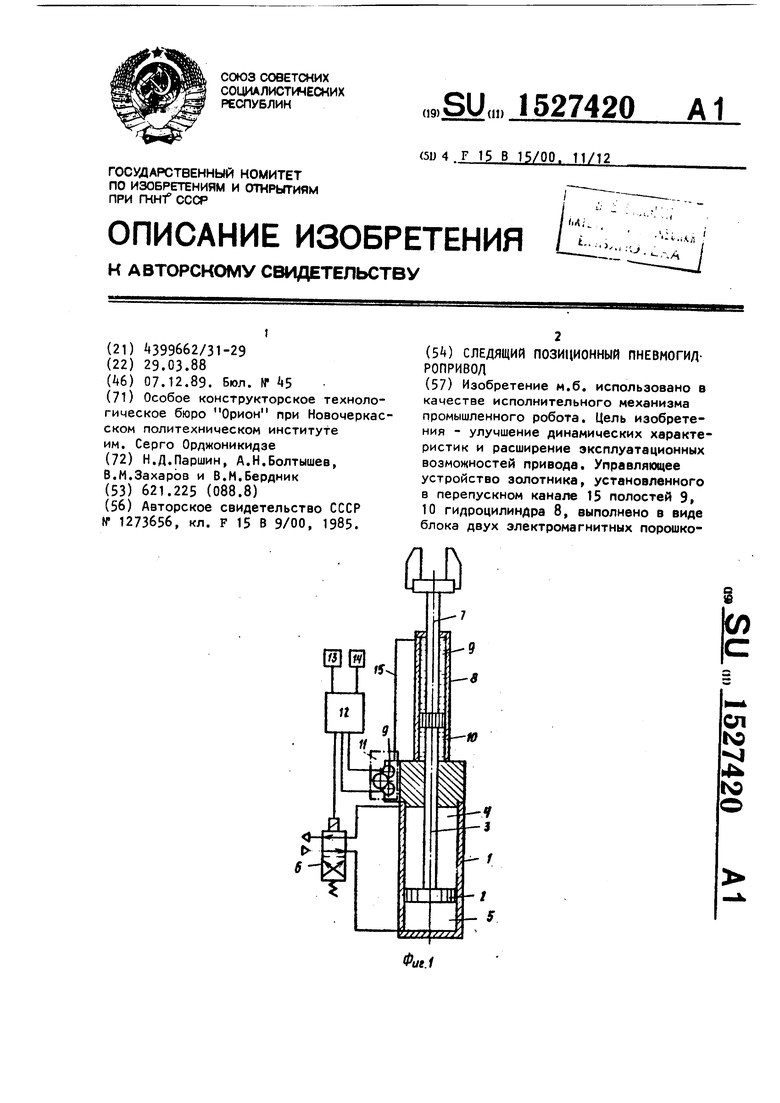
Изобретение относится к машиностроению, в частности к средствам гидропневмоавтоматики, и может быть использовано в качестве исполнительного механизма промышленного робота.
Цель изобретения - улучшение динамических характеристик и расширение эксплуатационных возможностей.
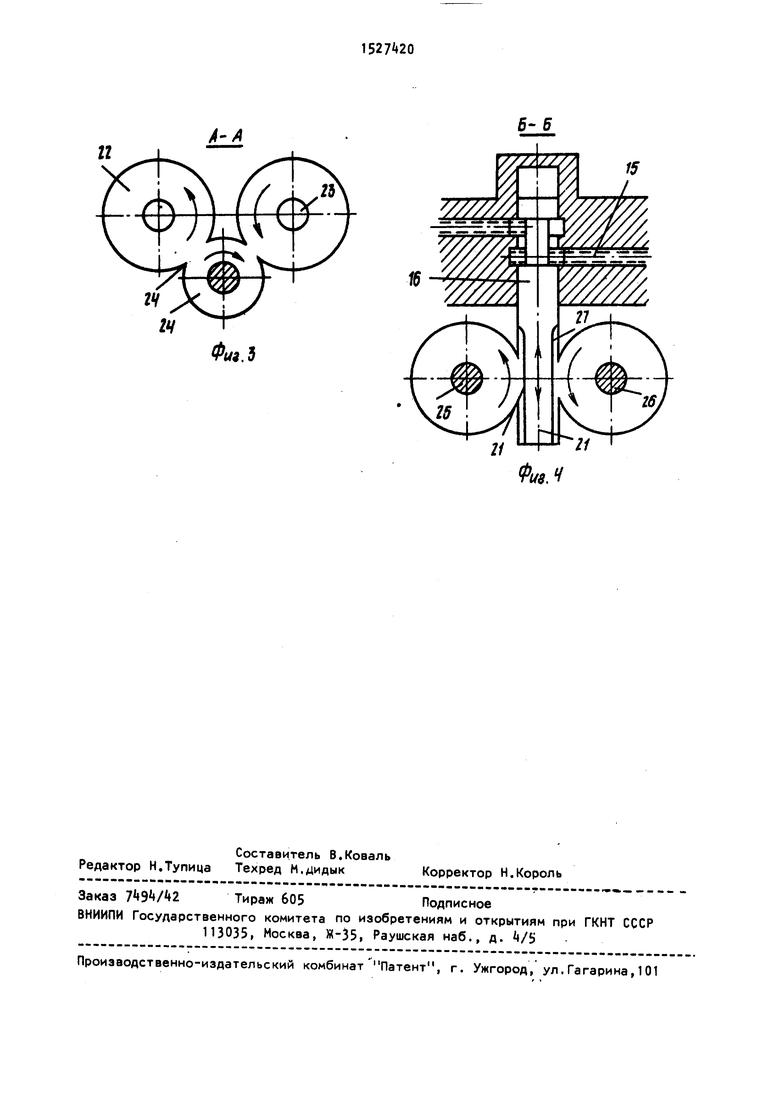
На фиг. 1 изображена общая компоновка привода; на фиг. 2 - устройство регулятора потока; на фиг. 3 - разрез А-А на фиг. 2; на фиг. t - разрез Б-Б на фиг. 2.
Следящий позиционный пневмогидро- привод (фиг.1) содержит пневмоцилиндр 1 с установленными в нем поршнем 2 и штоком 3 с образованием рабочих полостей 4 и 5, подключенных к пневмо- распределителю 6. Шток 3 жестко связан со штоком 7 гидроцилиндра 8, полости 9 и 10 которого подключены одна к другой через регулятор 11 потока, программный блок 12 связан с датчиками 13 и обратной связи по положению и скорости перемещения штоков 3 и 7.
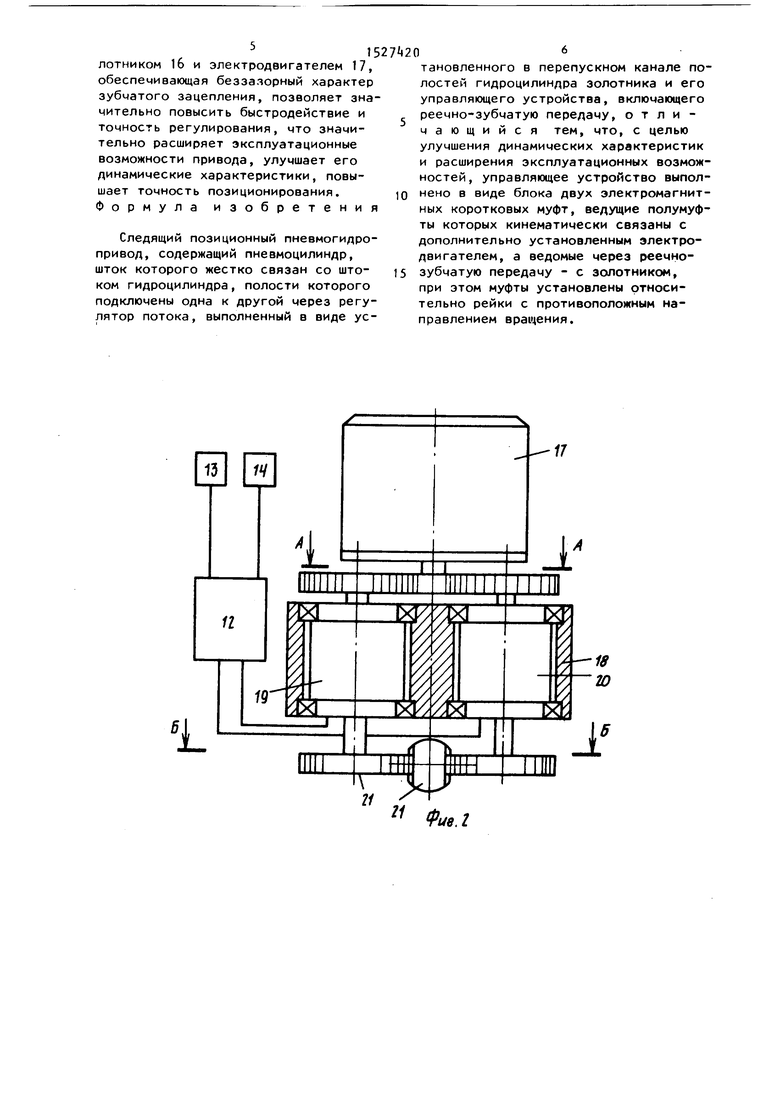
Регулятор 11 потока (фиг.2-) выполнен в виде установленного в перепускном канале 15 полостей 9 и 10 золотника 1б и его управляющего устройства , включающего электродвигатель 17, блок 18 двух электромагнитных по- рошковых муфт 19 и 20 и реечно-зубчатой передачи 21. Электродвигатель 17 кинематически связан с ведущими полумуфтами 22 и 23 посредством зубчатой передачи 2k таким образом, что направление вращения муфт 19 и 20 противоположно по знаку. Ведомые полумуфты 25 и 26 посредством рейки 27 взаимодействуют с золотником 1б.
Пневмогидроцилиндр работает следующим образом.
По сигналу программного блока 12 пневмораспределитель 6 переключается например, в позицию, при которой рабочая среда поступает в полость 5.
5
0
5
0
5
0
5
0
5
Под действием перепада давлений в полостях и 5 поршень 2 со штоком 3 перемещаются, при этом жидкость из полости 9 через канал 15 и регулятор 11 потока перетекает в полость 10.
Электродвигатель 17 вращается с постоянной скоростью, приводя во вращение ведущие полумуфты 22 и 23. В блоке 12 происходит сравнение текущих сигналов, поступающих от датчиков 13 и , с заданными и в соответствии с величиной рассогласования вырабатываются управляющие сигналы, поступающие на индукторы магнитного поля муфт 19 и 20, в соответствии с которыми меняется передаваемый крутящий момент каждой из муфт 19 и 20. Перемещение золотника 1б происходит под действием результирующего усилия, приложенного к передаче 21, а его замок определяется изменением баланса крутящих моментов, передаваемых муфтами 19 и 20. Перемещение золотника 1б вызывает изменение проводимости канала 15 и соответствующее изменение скорости перемещения штоков 3 и 7. При полном перекрытии канала 15 происходит позиционирование привода в заданном положении.
Таким образом, пневмогидропривод позволяет осуществлять изменение скорости перемещения токов 3 и 7 в соответствии с заданной программой движения. Автономность управляющего устройства, а также точность и быстродействие реализации управляющих си|- налов позволяют значительно повысить число возможных точек позиционирования путем максимального сокращения расстояния между двумя соседними точками позиционирования.
Использование в управляющем устройстве золотника 16 электромагнитных порошковых муфт 19 и 20, обладающих широким диапазоном изменения крутящего момента и высоким быстродействием, а также схема их взаимодействия с зо 1527
лотником 1б и электродвигателем 17, обеспечивающая беззалорный характер зубчатого зацепления, позволяет значительно повысить быстродействие и точность регулирования, что значительно расширяет эксплуатационные возможности привода, улучшает его динамические характеристики, повышает точность позиционирования. Формула изобретения
Следящий позиционный пневмогидро- привод, содержащий пневмоцилиндр, шток которого жестко связан со штоком гидроцилиндра, полости которого подключены одна к другой через регулятор потока, выполненный в виде ус
тановленного в перепускном канале полостей гидроцилиндра золотника и его управляющего устройства, включающего реечно-зубчатую передачу, отличающийся тем, что, с целью улучшения динамических характеристик и расширения эксплуатационных возможностей, управляющее устройство выполнено в виде блока двух электромагнитных коротковых муфт, ведущие полумуфты которых кинематически связаны с дополнительно установленным электродвигателем, а ведомые через реечно- зубчатую передачу - с золотником, при этом муфты установлены относительно рейки с противоположным направлением вращения.
//.,/
Х-/I
м.З
6-5
15
Физ.Ч
| Позиционный пневмогидропривод | 1985 |
|
SU1273656A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
