00
31511
Изобретение относится к электротехнике и может быть использовано в системах часз отного управления приводов с автономным инвертором тока.
Цель изобретения - повышение точности управления частотой.
Иа фиг. 1 приведена функциональная схема устройства для управления асинхронным электродвигателем с час- тотным управлением; на фиг. 2 - временные диаграммы его работы.
Устройство для управления асинхронным двигателем содержит (фиг, l) импульсный датчик 1 частоты вращения укрепленный на валу электродвигателя, усютитель 2 постоянного тока, перекидной ключ 3, первый неподвижный контакт которого соедннен с клеммой источника 4 опорного напряжения, ре- зистор 5, первый вывод которого соединен с подвилшым контактом ключа 3 Выходная клемма источника 4 опорного напряжения объединена с потенциальным входом цифроаналогового преобра- зователя (ЦА11) 6, кодовые шины которого подключены к выходу задатчика 7 обратного кода скольжения, а выход ЦАП б соединен с 1 ешшертирующим входом усилителя 2 постоянного тока, ин- вертирз ющий вход которого соедннен с вторым выводом резистора 5 и первой обкладкой конденсатора 8. Вторая обкладка конденсатора и второй непо- двIiжный контакт ключа соединены с об- щей точкой схемы. Выход усилителя 2 постоянного тока через управляемый генератор 9 связан со счетным входом триггера 10 и первым входом блока 11 выделения периода, второй вход кото- рого подключен к выходу импульсного датчика 1 частоты вращения, а выход соединен с управляющим входом клю- ча 3. Выходная клемма устройства объединена с выходом триггера 10.
Устройство работает следующим образом.
ШШ б преобразует код задатчика 7 в пропорциональное значение тока. Код задатчика 7 имеет вид
N 2 (1-S),()
где п - разрядность используемого двоичного кода; S - величина заданного скольже-
ния.
Величина выходного тока ДАЛ может быть представлена в виде
I, U -I-bK,,.K,;2(l-S), (2)
где и. - величина напряжения опорного источника, поступающего на вход ЦАП 6; R - коэффициент передачи llAII 6
по току.
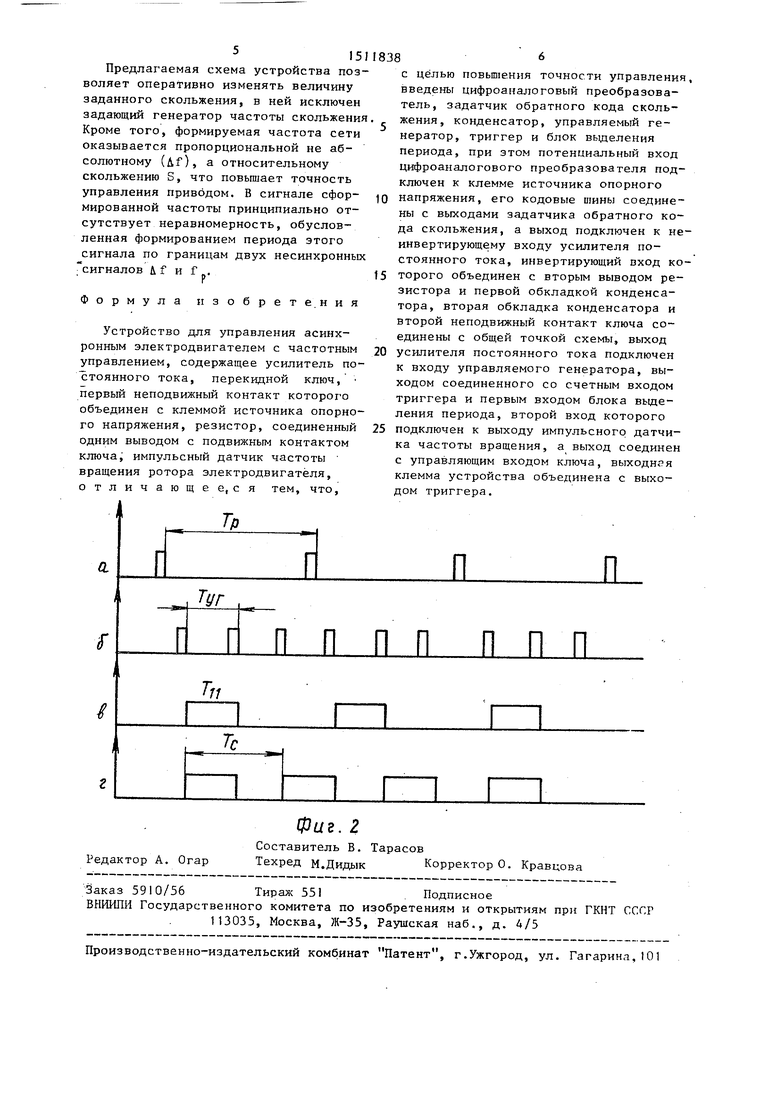
Блок 11 выделения периода по команде Тр от нмпульсного датчика 1 частоты вращения формирует импульсы Т, , по длительности равные периоду сигнала Ту управляемого генератора 9 (фиг. 2 а-в). Таким образом, в течение каждого периода выходного напряжения датчика.1 формируется один импульс указанной длительности. На время действия этих импульсов ключ 3 подключает резистор 5 к клемме источника 4 опорного напряжения, все остальное время вывод резистора 5 оказывается подключенным к общей точке схемы. За счет указанного взаимодействия элементов на инвертирующий вход усилителя 2 постоянного тока воздействует ток 1, среднее значение которого (выделяемое фильтром, образованным резистором 5 и конденсатором 8) имеет величину
1 UO/R - T.,,VTp, (3)
где Т - период сигнала управляемого
генератора;
Тр - период выходного сигнала датчика I, который выдает один импульс за оборот двигателя, имеющего одну пару полюсов;
R - сопротивление резистора 5. При выборе достаточно большого коэффициента усиления усилителя 2 постоянного тока разность входных токов близка к нулю; из равенства следует
Туг Тр.(-8), (4) откуда частота управляемого генератора
f,,r fp/R Кцд, 2(1-8), (5)
где fp 1/Тр - частота вращения вала двигателя.
Сигнал на выходе триггера 10 имеет частоту, в.два раза меньшую частоты управляемого генератора 9, поэтому частота управления инвертором
fc fp/2 R-Ki fin-2 (i-S), (6)
Выбирая 2R K,.(, 2 1, окончательно получают
fc ,. (7)
Таким образом, сформированная частота управления инвертором отличается от частоты вращения двигателя на вел1иину заданного скольжения.
515
Предлагаемая схема устройства позволяет оперативно изменять величину заданного скольжения, в ней исключен задающий генератор частоты скольжения Кроме того, формируемая частота сети оказывается пропорциональной не абсолютному (if), а относительному скольжению S, что повьшает точность управления приводом. В сигнале сформированной частоты принципиально отсутствует неравномерность, обусловленная формированием периода этого сигнала по границам двух несинхронных сигналов Л f и f ,
Формула пзобрете.ния
Устройство для управления асинхронным электродвигателем с частотным управлением, содержащее усилитель по- стоянного тока, перекидной ключ, первьй неподвижный контакт которого объединен с клеммой источника опорного напряжения, резистор, соединенный одним выводом с подвижным контактом ключа, импульсный датчик частоты вращения ротора электродвигателя, отличающее,ся тем, что.
8386
с целью повьт1ения точности управления, введены цифроаналоговый преобразователь, задатчик обратного кода сколь- - жения, конденсатор, управляемый генератор, триггер и блок выделения периода, при этом потенциальный вход цифроаналогового преобразователя подключен к клемме источника опорного
10 напряжения, его кодовые шины соединены с выходами задатчика обратного кода скольжения, а выход подключен к неинвертирующему входу усилителя постоянного тока, инвертирующий вход ко5 торого объединен с вторым выводом резистора и первой обкладкой конденсатора, вторая обкладка конденсатора и второй неподвижный контакт ключа соединены с общей точкой схемы, выход
0 усилителя постоянного тока подключен к входу управляемого генератора, выходом соединенного со счетным входом триггера и первым входом блока выделения периода, второй вход которого
5 подключен к выходу импульсного датчика частоты вращения, а выход соединен с управляющим входом ключа, выходная клемма устройства объединена с выходом триггера.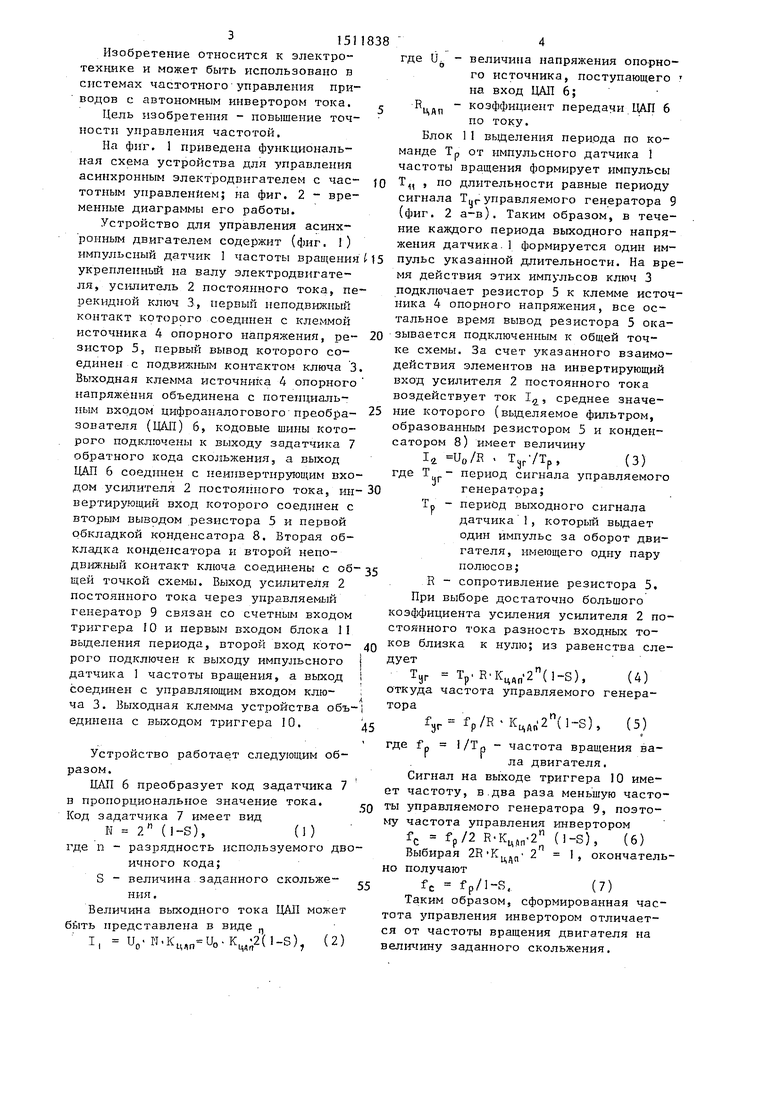
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД С НЕУПРАВЛЯЕМЫМ ЗВЕНОМ ПОСТОЯННОГО ТОКА | 1993 |
|
RU2067352C1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Устройство для управления двухфазным асинхронным электродвигателем | 1990 |
|
SU1777225A1 |
| Устройство для управления асинхронным электродвигателем | 1989 |
|
SU1663734A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2361356C1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1989 |
|
SU1646035A2 |
| Способ управления электроприводом лифта с двухскоростным асинхронным электродвигателем и устройство для его осуществления | 1985 |
|
SU1307528A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1992 |
|
RU2054223C1 |
| Система управления пылесосом | 1991 |
|
SU1771684A1 |
| Устройство для управления частотно-регулируемым асинхронным электроприводом | 1991 |
|
SU1793527A1 |
Изобретение относится к электротехнике, в частности к замкнутым системам частотно-управляемого асинхронного электропривода. Цель изобретения - повышение точности управления. В устройстве для управления частотой асинхронного электродвигателя с частотным управлением выходная клемма источника 4 опорного напряжения объединена с потенциальным входом цифроаналогового преобразователя 6,кодовые шины которого объединены с выходом задатчика 7 обратного кода скольжения. Выход цифроаналогового преобразователя 6 соединен с неинвертирующим входом усилителя 2 постоянного тока, инвертирующий вход которого объединен со вторым выводом резистора 5 и первой обкладкой конденсатора 8. Вторая обкладка конденсатора 8 и второй неподвижный контакт ключа 3 соединены с общей точкой схемы. Выход усилителя 2 постоянного тока через управляемый генератор 9 объединены со счетным входом триггера 10 и первым входом блока 11 выделения периода, второй вход которого подключен к выходу импульсного датчика частоты вращения ротора электродвигателя 1, а выход соединен с управляющим входом триггера. Сформированная частота управления инвертором отличается от частоты вращения двигателя на величину заданного скольжения. 2 ил.
| Частотно-управляемый тяговый электропривод | 1984 |
|
SU1211843A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Эпштейн И | |||
| И | |||
| Автоматизированный электропривод переменного тока | |||
| М.: Энергоиздат, 1982, с | |||
| Вагонный распределитель для воздушных тормозов | 1921 |
|
SU192A1 |
