Фиг.1
Изобретение относится к авиационной технике, в частности к устройствам для уменьшения вибраций (бафтин- га) крыла летательного аппарата.
Цель изобретения - повьшшние комфорта пилотирования и ресурса летательного аппарата путем уменьшения вибраций крьша.типа бафтинга.
крыла. Выходной электрический сигнал от датчика 5 проходит через пороговую схему и полосно-пропускной фильтр, полоса пропускания которого соответствует форме подлежащих исправлению колебаний изгиба крыла. За полосовым фильтром сигнал проходит через псевдоинтегрирующую схе
| название | год | авторы | номер документа |
|---|---|---|---|
| Трехосный электростатический акселерометр | 1984 |
|
SU1346058A3 |
| Электростатический акселерометр | 1981 |
|
SU1308206A3 |
| Запальная свеча дугового типа | 1981 |
|
SU1074424A3 |
| Многолопастный воздушный винт двигателя летательного аппарата | 1987 |
|
SU1711664A3 |
| Маяк для воздушной радионавигации | 1977 |
|
SU725577A1 |
| Многолопастный воздушный винт двигателя летательного аппарата | 1987 |
|
SU1704622A3 |
| Приемное устройство системы навигации летательного аппарата по радиосигналам маяков | 1976 |
|
SU709013A3 |
| Лопасть воздушного винта летательного аппарата | 1986 |
|
SU1741608A3 |
| Электрический генератор с последовательной цепью возбуждения колебаний | 1977 |
|
SU869570A3 |
| Устройство для определения углового положения вертолета относительно радиомаяка | 1975 |
|
SU686641A3 |
Изобретение относится к авиационной технике. Цель изобретения - повышение комфорта пилотирования и ресурса летательного аппарата путем уменьшения вибраций крыла типа бафтинга. На крыле 1 в корневой части установлена рулевая поверхность 3, а также датчик 5, который через пороговый фильтр 6 и блок 7 обработки отфильтрованного сигнала связан с сервоклапанами двухкамерного гидравлического привода, установленного между приводом 4 рулевой поверхности и самой рулевой поверхностью. Сигнал от датчика после обработки подается на двухкамерный привод, который вызывает знакопеременное отклонение рулевой поверхности для гашения колебаний /бафтинга/ крыла. 1 з.п. ф-лы, 2 ил.
На фиг,1 представлена принципиаль-10 му, предназначенную вырабатывать
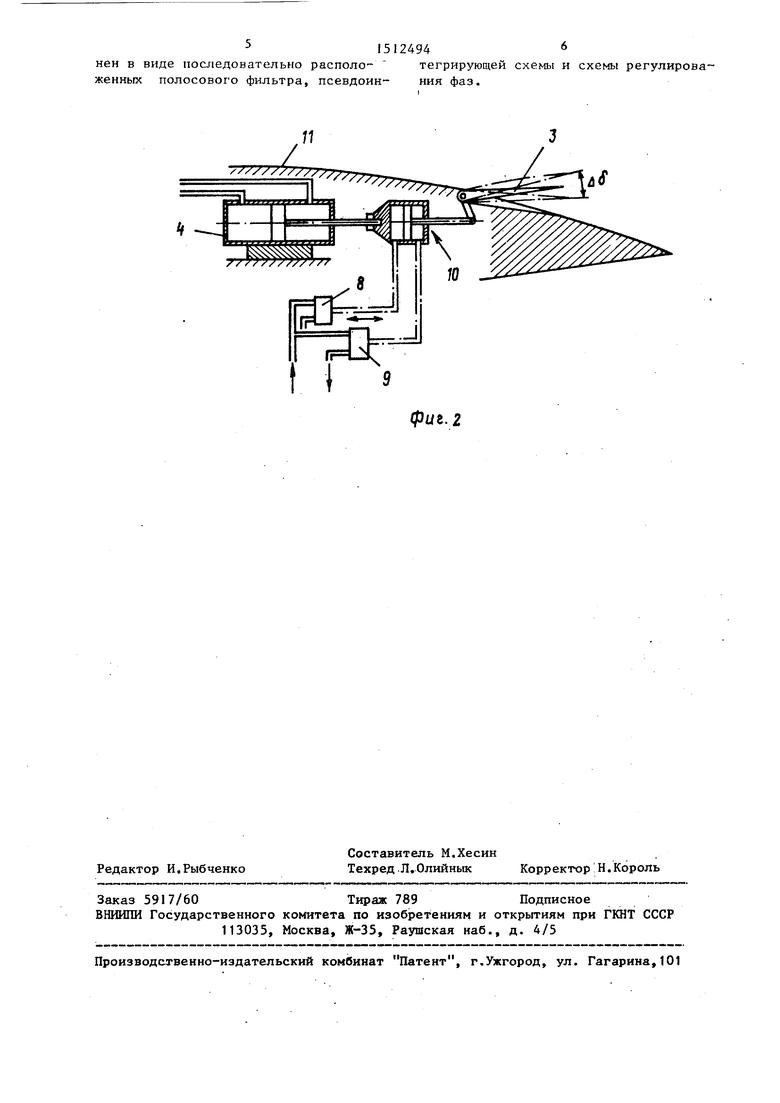
ная схе ма предлагаемого устройства; на фиг.2 - схема привода руля с исползованием предлагаемого устройства.
В корневой части крыла 1 самолета 2 установлена рулевая поверхность 3, например интерцептор или закрылок кинематически связанная с приводом 4. На крыле в корневой его части установлен датчик 5, которьш выдает сигнал; характеризующий по амплитуде, частоте и фазе мгновенную величину параметра, связанного с бафтингом, например величину динамического напряжения в месте установки датчика. Датчик электрически связан с пороговым фильтром 6, который выдает выходной сигнал в том случае, когда амплитуда выдаваемого датчиком сигнала превышает верхний уровень нормального порога вибрации крыла. Выход порогового фильтра 6 соединен с входом блока 7 обработки отфильтрованного сигнала, включающего последовательно расположенные полосовой фильтр, полоса пропускания которого соответствует форме подлежащих исправлению колебаний крыла, псевдоинтегрирующую схему, вырабатывающую сигнал, отражающий скорость колебательного движения, и схему регулирования фаз для уменьшения бафтинга крыла. Выход блока 7 электрически соединен с сер- воклапанами 8 и 9 двухкамерного гидравлического привода 10, который установлен в кинематической цепи между приводом 4 рулевой поверхнос™ ти и самой рулевой поверхностью 3. Величина хода этого привода 10 в целях безопасности в случае его отказа выбрана из условия дополнительного отклонения руля при гашении бафтинга. Амплитуда колебаний, необходимых для уменьшения бафтинга, порядка ±1
Датчик 5 измеряет параметр, отражающий динамическое напряжение, обусловленное деформацией несущей поверхности, вызванной вибрацией
5
0
5
5
0
5
0
5
сигнал, отражающий скорость колебательного движения. Затем сигнал проходит схему регулировки фаз, где вырабатывается сигнал, отражающий точную фазу и амплитуду с учетом собственных характеристик рулевой поверхности, используемой для уменьшения бафтинга. Этот сигнал поступает на сервоклапаны 8 и 9 двухкамерного гидравлического привода 10, вызывая знакопеременные отклонения рулевой поверхности, а следовательно, появление на крыле 1 знакопеременньпс нагрузок аэродинамического происхождения с амплитудой и фазой такой, чтобы уменьшить выявленную форму вибрации крыла.
Формула изобретения
„ - |О
максимальной амплитудой не более 1 , при этом дополнительный привод электрически связан с блоком обработки отфильтрованного сигнала, характеризующего динамические напряжения, вызванные колебаниями типа бафтинга,
нен в виде последовательно распело- тегрирующей схемы и схемы регулирова- женных полосового фильтра, псевдоин- ния фаз.
фиг. 2
| Honlinger Н | |||
| Капельная масленка с постоянным уровнем масла | 0 |
|
SU80A1 |
