оо
00
го
со
ел
Изобретение относится к автоматизации производственных процессов в угольной промьшленности, а именно к способам и устройствам для контрол положения исполнительного органа горной машины относительно границы порода - уголь.
Цель изобретения - повышение точности процесса контроля.
Нэ фиг. 1 представлен, фрагмент осциллограммы, снятой на шахте при работе комбайна, отображающий процесс . в гидродомкрате поворотного редуктора при разрушении исполнитель ным органом угля и присечке породы;
I на фиг. 2 - схема устройства для
осуществления способа.
I По представленному фрагменту осцил лограммы и предварительно проведен- ; Яому расчету видно, что математическое ожидание процесса разрушения угля отличается от математического ожидания процесса присечки породы в 1,75 раза, а дисперсия процесса присечки породы в 4,8 раза больше дисперсии разрушения угля. Кроме того, минимальный период времени оценки дисперсии с погрешностью не более 0,2 составляет 5 с (оценка по критерию Стьюдента). С увеличением этого периода времени погрешность оценки дисперсии уменьшается, но и увеличивается вероятность неучтен- ного ухода исполнительного органа в породу. Из этого следует, что операции определения дисперсии, задания уставки за период 5 с при дви
жении исполнительного органа по по- роде, сравнения измеряемой дисперсии с уставкой не могут быть изменены или исключены. Точность процесса контроля повышается за счет того, что по результатам полученных осцил лограмм вероятность изменения дисперсии процесса присечки породы относительно дисперсии процесса разрушения угля Bbmie вероятности изменения математического ожидания процесса при- сечки породы относительно мЪтемати- ческого ожидания процесса при разрушении угля, при этом время осуществления контроля при определении дисперсии в несколько раз меньше времени осуществления контроля при определении корреляционной функции для одной и той же величины погрешности процесса контроля.
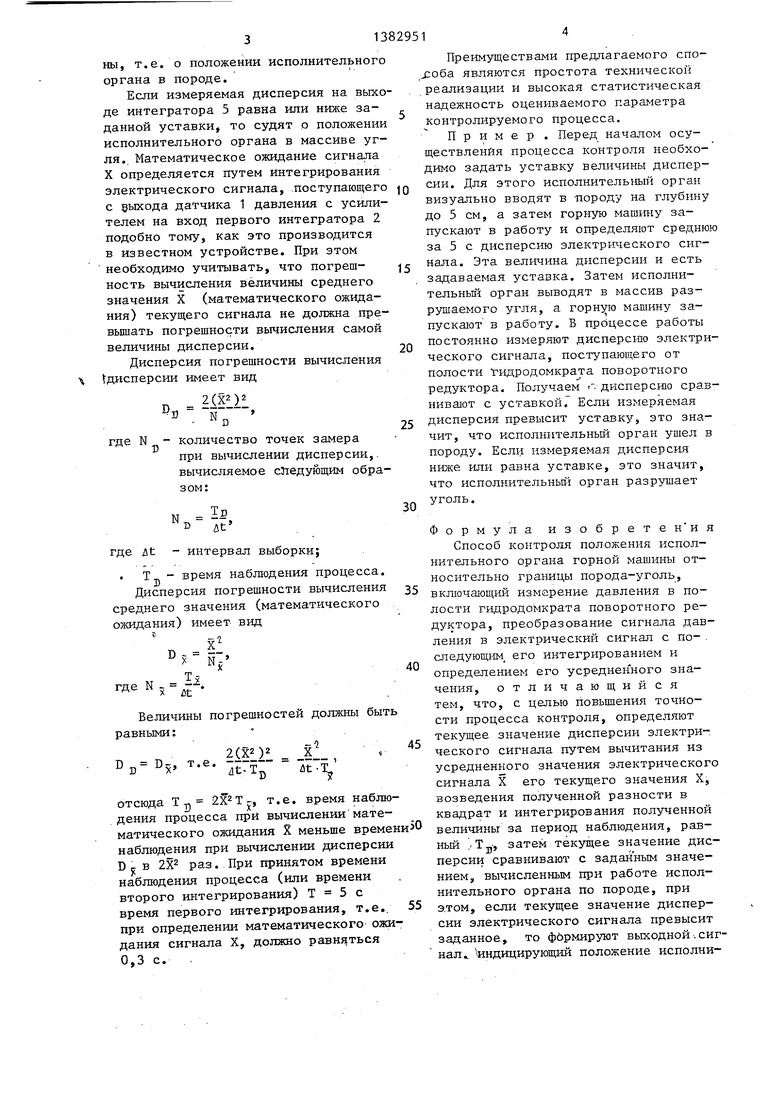
Устройство, реализующее способ (фиг. 2), содержит датчик 1.давления, с ускпителем, подключенный к входам первого интегратора 2 и вычитателя 3, выход которого через квадратор 4. соединен с входом второго интегратора 5, выходы которого соединены с входом блока 6 памяти и с первым входом порогового элемента 7 соответственно через замыкающий и размыкающий контакты тумблера 8.
Способ осуществляют следующим образом.
Предварительно задают уставку: исполнительный орган вводят в породу на допустимую глубину (2-5 см). лер 8 ставят в положение замыкания контакта 8.1 и размыкания контакта 8.2. В этом положении он остается 5 с. За это время сигнал с датчика 1 давления с усилителем поступает на один вход вычитателя 3, на другой вход которого поступает этот же сигнал, но предварительно проинтегрированный в первом интеграторе 2, Разностный сигнал с вычитателя 3 через квадратор 4 и второй интегратор 5 поступает на вход блока 6 памяти. Таким образом, в конечном итоге в блоке 6 памяти остается в виде уставки средняя дисперсия сигнала от датчика 1 давления с усилителем, вычисленная по формуле
D i (Х - X)2dX,
(1)
где X - текущее значение;
X - математическое ожидание; Т J-, - период наблюдения, Т р , 5 х;. После этого тумблером 8 устройство включают в рабочий режим. Для чего тумблер 8 ставят в положение размыкания контакта 8,1 и замыкания контакта 8.2. На выходе второго ин-. тегратора 5 имеется тот же сигнал, что и в предьщущем случае, вычисленный по формуле (1) также за период 5 с, но поступавший на один вход порогового элемента 7, на другой вход которого поступает предварительно (по описанной процедуре) заданная уставка из блока 6 памяти.
Если измеряемая дисперсия на выходе второго интегратора 5 превьш1ает заданнзж) уставку, то судят о присечке исполнительным органом горной машины породы больше заданной величины, т.е. о положении исполнительного органа в породе.
Если измеряемая дисперсия на выходе интегратора 5 равна или ниже заданной уставки, то судят о положении исполнительного органа в массиве угля. Математическое ожидание сигнала X определяется путем интегрирования электрического сигнала, поступающего с выхода датчика 1 давления с усилителем на вход первого интегратора 2 подобно , как это производится в известном устройстве. При этом необходимо учитывать, что погреш- ность вычисления величины среднего значения X (математического ожидания) текущего сигнала не должна пре- вьшать погрешности вычисления самой величины дисперсии.
Дисперсия погрешности вычисления дисперсии имеет вид
)
N
где
%количество точек замера при вычислении дисперсии,, вычисляемое следующим образом:
м - Is о &t
где At - интервал выборки;
Т.. - время наблюдения процесса. Дисперсия погрешности вычисления среднего значения (математического ожидания) имеет вид
Х
т где N 5 -
Величины погрешностей должны быт равными:
OX
т.е,
2(xMi Х , dt lZ ut
D
отсюда T-Q 2X2 Т-, т.е. время наблюдения процесса при вычислении математического ожидания X меньше времен наблюдения при вычислении дисперсии D 5J в 2X2 раз. При принятом времени наблюдения процесса (или времени второго интегрирования) Т 5 с время первого интегрирования, т.е., при определении математического ожидания сигнала X, должно равняться 0,3 с.
0
5
0
5
0
5
О 5
Преимуществами предлагаемого спо- .j;o6a являются простота технической реализации и высокая статистическая надежность оцениваемого параметра контролируемого процесса.
Пример , Перед началом осуществления процесса контроля необходимо задать уставку величины дисперсии. Для этого исполнительный орган визуально вводят в породу на глубину до 5 см, а затем горную машш1у запускают в работу и определяют среднюю за 5 с дисперсию электрического сигнала. Эта величина дисперсии и есть задаваемая уставка. Затем исполни- тельньй орган выводят в массив разрушаемого угля, а горную машину запускают в работу. В процессе работы постоянно измеряют дисперсию электрического сигнала, поступающего от полости тидродомкрата поворотного редуктора. Получаем дисперсию сравнивают с уставкой. Если измеряемая дисперсия превысит уставку, это значит, что исполнительный орган ушел в породу. Если измеряемая дисперсия ниже или равна уставке, это значит, что исполнительный орган разрушает уголь.
Формула изобрете н и я
Способ контроля положения исполнительного органа горной машины относительно гpaIiицы порода-уголь, включающий измерение давления в полости гидродомкрата поворотного редуктора, преобразование сигнала давления в электрический сигнал с по-. следующим, его интегрированием и определением его усреднен ного значения, отличающийся тем, что, с целью повьш1ения точности процесса контроля, определяют текущее значение дисперсии электрического сигнала путем вычитания из усредненного значения электрического сигнала X его текущего значения X, возведения полученной разности в квадрат и интегрирования полученной величины за период наблюдения, равный . Tjj-, затем текущее значение дисперсии сравнивают с задай ным значением, вычисленным при работе исполнительного органа по породе, при Э.ТОМ, если текущее значение дисперсии электрического сигнала превысит заданное, то фбрмируют выходной-.сигнал., Индицирующий положение исполни513829516
{тельного органа в породе, если теку- исполнительного органа в угле, при щее значение дисперсии ниже или рав- этом время первого интегрирования :io заданному, то формируют выходной Т-долж1ю быть меньше периода наблю- сигнал, соответствующий положению дения Т в 2Х раз.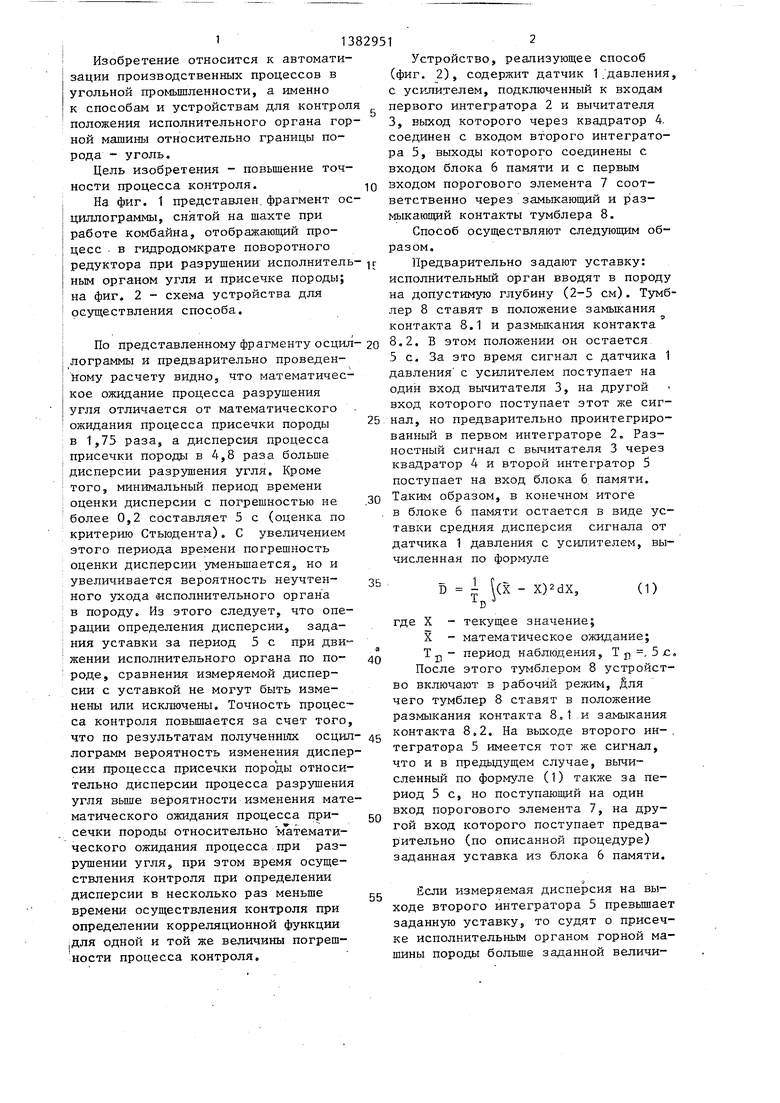
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля положения исполнительного органа горной машины относительно границы порода - уголь | 1987 |
|
SU1513142A1 |
| Способ контроля границы порода-уголь | 1988 |
|
SU1610003A1 |
| Способ контроля положения исполнительного органа горной машины относительно границы уголь-порода и устройство для его осуществления | 1980 |
|
SU977770A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2594631C1 |
| Вероятностный интегратор | 1989 |
|
SU1667064A1 |
| Устройство для управления процессом турбинного бурения | 1983 |
|
SU1104247A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2589495C1 |
| Устройство контроля границы порода-уголь пласта для горной машины,на исполнительных органах которой установлены режущие зубки | 1982 |
|
SU1046505A1 |
| Самонастраивающаяся система управления | 1978 |
|
SU744446A1 |
| Устройство для статистической обработки информации | 1974 |
|
SU525101A1 |
Изобретение относится к автоматизации производственных процессов в угольной пром-ти. Цель изобретения повьшение точности процесса контроля. /Перед началом процесса контроля задают уставку величины дисперсии. Для этого исполнительный орган визуально вводят в породу на глубину до 5 см. Затем горную машину запускают в работу и определяют дисперсию электрического сигнала. Эта величина и есть задаваемая уставка. Затем исполнительный орган вьшодят в массив разрушаемого угля. Горную машину запускают в работу и постоянно измеряют дисперсию электрического сигнала, поступающего от полости гидродомкрата поворотного редуктора. По- лучаемую дисперсию сравнивают с Уставкой. Если измеряемая дисперсия превьшшет уставку, то это значит, что исполнительный орган ушел в породу, а если измеряемая дисперсия ниже или равна уставке - орган разрушает уголь. 2 ил. о
Дабление
Фиг, 2
Фи.1
Ъремя
| Способ и устройство контроля положения исполнительного органа горной машины относительно границы уголь-порода | 1977 |
|
SU767346A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Способ контроля положения исполнительного органа горной машины относительно границы "уголь-порода" и устройство для его осуществления | 1980 |
|
SU898058A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
