1
(21)4267403/24-10
(22)24.06.87
Х46) 07.10.89. Бюл. № 37
,(71) Восточно-Сибирский филиал Научно-исследовательского института автомобильного транспорта (72) Б.М. Константинов, A.M. Бородич, A.M. Злобин и В.А. Кустов i (53) 681.26 (088.8) (56) Авторское свидетельство СССР № 802802, кл. G 01 G 3/16., 1981. Авторское свидетельство СССР № 678323 кл, G 01 G 19/OQ, 1975.
(54) СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ ГРУЗА НА ДВИЖУЩЕМСЯ КОЛЕСНОМ ТРАНСПОРТНОМ СРЕДСТВЕ
(57) Изобретение относится к области весоизмерительной техники. Для повьте- ния точности определения массы груза на транспортном средстве измеряют вертикальные колебания этого средства при его двйжеюси с грузом и без него, вьщеляют резонансные частоты этих колебаний, по квггорым вычисляют массу , с учетом коэффициента жесткости подрессоренных частей, т.е. о массе груза судят по разнице между массой подрессоренных частей с грузом и известной массой подрессоренных частей тран- g спортного средства. 2 ил.
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения массы груза на движущихся объектах | 1986 |
|
SU1462117A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2012 |
|
RU2566174C1 |
| ДВУХРЕЖИМНАЯ СИСТЕМА ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2705472C1 |
| Способ диагностирования жесткости шины транспортного средства на стенде | 1983 |
|
SU1244541A1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2012 |
|
RU2575368C1 |
| СИСТЕМА ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2456170C2 |
| ПНЕВМОГИДРАВЛИЧЕСКАЯ РЕССОРА ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2102254C1 |
| ГИДРОПНЕВМАТИЧЕСКАЯ ПОДВЕСКА КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2560216C1 |
| СИСТЕМА ПОДВЕСКИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА, СОДЕРЖАЩАЯ ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД | 2009 |
|
RU2448000C2 |
| БЫСТРОДЕЙСТВУЮЩАЯ ПОДВЕСКА КОЛЕСА ГОНОЧНОГО АВТОМОБИЛЯ | 1999 |
|
RU2139796C1 |
Изобретение относится к области весоизмерительной техники. Для повышения точности определения массы груза на транспортном средстве измеряют вертикальные колебания этого средства при его движении с грузоми без него, выделяют резонансные частоты этих колебаний, по которым вычисляют массу с учетом коэффициента жесткости подрессоренных частей, т.е. о массе груза судят по разнице между массой подрессоренных частей с грузом и известной массой подрессоренных частей транспортного средства. 2 ил.
Изобретение относится к весоизмерительной техни1 е.
Целью изобретения является повышение точности.
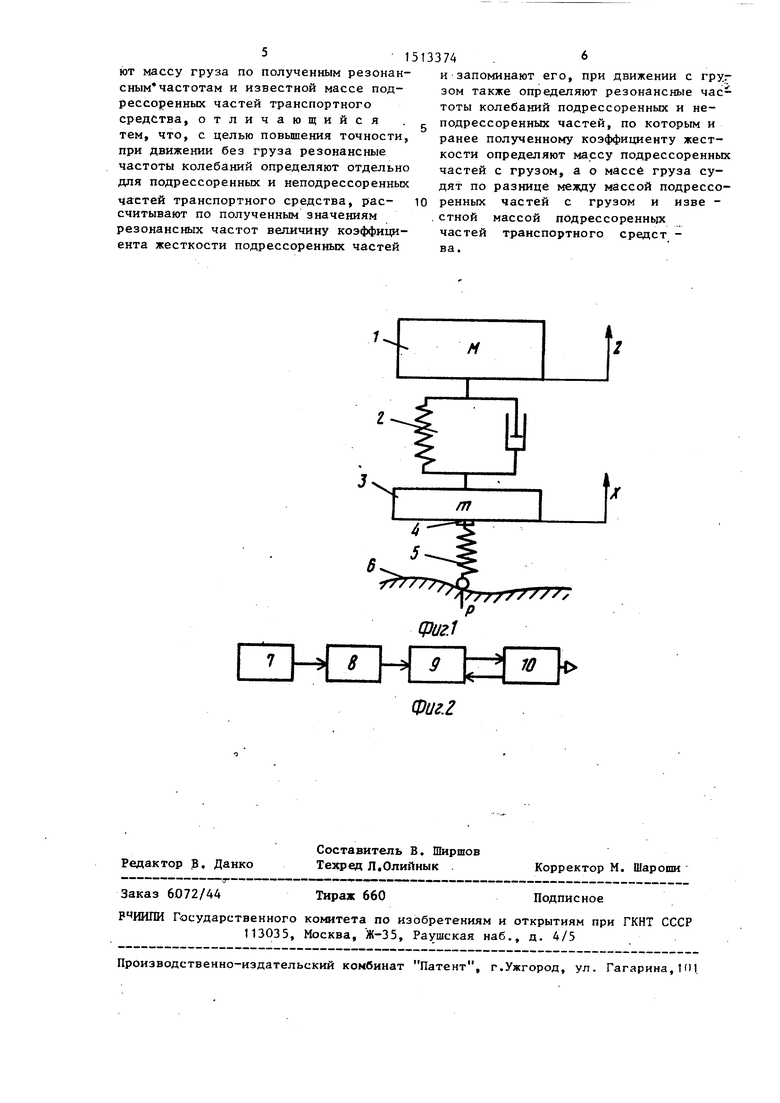
На фиг. 1 показана схема вертикаль ных колебаний одного из мостов колесного транспортного средства, поясняющая способ; на фиг, 2 - структурная схема устройства для реализации способа.
Расчетная схема по фиг. 1 включает подрессоренные части, приходящиеся на мост 1,; с массой М, упругий .; элемент 2 с xapaктepиcтикa да: С - коэффициент жесткости подрессореНйых.
,4
частей, К - коэффициен кого трения подрессоре неподрессоренные части ш, датчик 4 вертикальн неподрессоренных часте мент 5 с. характеристи фициент жесткости непо частей (шины), вынужда стороны основания 6.
Исходя из расчетной тудно-частотные характ кальных ускорений соот рессоренных и неподрес имеют вид
Ai(W)
wlciiGi+KiHi},
ШЙ+(МС+тС- -МСу)У2+ССц 2+ СуК -МК -тК
частей, К - коэффициент гидравлического трения подрессоренных частей, неподрессоренные части 3 с массой ш, датчик 4 вертикальных колебаний , неподрессоренных частей, упругий эле- мент 5 с. характеристикой С, - коэффициент жесткости неподрессоренных частей (шины), вынуждающую силу со стороны основания 6.
Исходя из расчетной схемы амплитудно-частотные характеристики вертикальных ускорений соответственно подрессоренных и неподрессоренных частей имеют вид
СП
М
1Й
(1)
ГА ГиЛг ,iC-2MCW2+M2wVK2W2)
j wj j МтЙ + СМС+тС+МСШ) W2 +cc 2 + C
е W 2if - угловая частота вертикальных колебаний; f - частота вертикальных колебаний;2 - вертикальные колебания Q
подресйоренных частей. Продифференцировав по W и приравняв нулю уравнения (1) и (2), т.е.
drAi(W)T2 dW
Q;
15
dlAji(W) dW
О,
получаем
ю
-(MmK)2W.,, -2(MmG)2Wp, +(2М2тСЗ +
pz.
+2Mm2 сз +2M2mC2 . +4МтССц,К2 +
+M C2K2-2MC K -2mC K)Wp2 +2( -2MCC2K -2mC2C K2-2MC2C,K2). + +2 ( 2С2 eg,К2 -МСЗ Cgj-iriC Сц, ) W, +
0; (3)
,
(M-V +2МЗ тК2 -2М пС-2М тСц,) Wp, + +2(М С+2М5тС2+2м ССи-1-4МЗ ,-№ СЗ -№ шСЗ -5МЗ С2 Сц,-6М2 тС2 C +4№nCC K2 40.
При движении колесного транспортного средства происходят колебания
„ .его подрессоренных и неподрессорен-2M3Cj,K -2M2mCj K2)Wpx +2(ЗМ2ССц,К2- ы астеА, при этом датчик 7, например акселерометр (фиг. 2), вьфаба- тывает сигнал, пропорциональный амплитуде колебаний неподрессоренных частей, который поступает на усилитель 8 и далее через аналого-цифровой преобразователь 9 на микропроцессорную систему 10, где сначала производится быстрое преобразование Фурье, позволяющее определить собственные частоты вертикальных колебаний подрессоренных и неподрессо- ренных частей, а затем по приведенным формулам определяется масса пе-; ревозимого груза.
74M3CCS, +2M2C K2-MC K -mC K- )WpK + +(8М2 СЗ Сц,+8№СЗ Сщ-8МСС2 К С С -4МС2С К2-4тС2Сц,К2+2С2„ K)Wpx + +2(2C2C2K2-MC Cy-mC Ci,-4MC C2)WJ, +
где W
О
W,
ft px
(4)
собственные угловые
частоты вертикальных колебаний соответственно подрессоренньк и неподрессоренных частей.
45
Уравнения (3) и (4) являются базо- выми при определении массы перевози, кого колесным транспортным средством груза.
Для случая движения без груза, . когда М MQ, где М - известная масса подрессоренных частей, приходящаяся на данный мост, уравнения (4) и (3) приводятся к виду
Формула изобретения
Способ определения массы груза на движущемся колесном транспортном средстве, заключающийся в том, что измеряют вертикальные колебания э1о- го средства при его движении без груза и с грузом, вьщеляют резонансные частоты этих колебаний и рассчитываMKVP mKW JJ (2)
Сш tfCWpx, ); С ,).
Из совместного решения этих уравнений определяется коэффициент жесткости С колесного транспортного средства.
Для случая движения с грузом уравнения (4) и (3) приводим к виду
С ц, M (Wpx); м Q(Wp,).
(7) (8)
При совместном решении этих уравнений подставляем значение коэффициента С, найденное в предьиущем случае, и определяем массу подрессоренных частей.
Окончательно массу груза определяем из вьгражения
М,
У
М - М
о
30
Устройство для реализации способа работает следующим образом.
Формула изобретения
Способ определения массы груза на движущемся колесном транспортном средстве, заключающийся в том, что измеряют вертикальные колебания э1о- го средства при его движении без груза и с грузом, вьщеляют резонансные частоты этих колебаний и рассчитыва51
ют массу груза по полученным резонансным частотам и известной массе подрессоренных частей транспортного средства, отличающийся тем, что, с целью повьппения точности, при движении без груза резонансные частоты колебаний определяют отдельно для подрессоренных и неподрессоренных
частей транспортного средства, рассчитывают по полученным значениям резонансных частот величину коэффициента жесткости подрессоренных частей
и запоминают его, при движении с груг зом также определяют резонансные частоты колебаний подрессоренных и неподрессоренных частей, по которым и ранее полученному коэффициенту жесткости определяют массу подрессоренных частей с грузом, а о массб груза судят по разнице между массой подрессоренных частей с грузом и язве - стной массой подрессоренных частей транспортного средст - ва.
10
Фиг.г
