(
31513
Изобретение относится к автоматике и вычислительной технике и может найти применение в cиcтe 5ax контроля за местоположением подвижных объектов.
Цель изобретения - повьшение точности учета перемещаемых изделий.
Поставленная цель достигается за счет определения (параллельно с дат- чиком направления перемещения) направления перемещения изделий по последовательности возникающих на выходе датчиков наличии сигналов при пересечении зоны визирования этих датчиков перемещаемыми изделиями, т.е. за счет косвенного дублирования датчика направления перемещения.
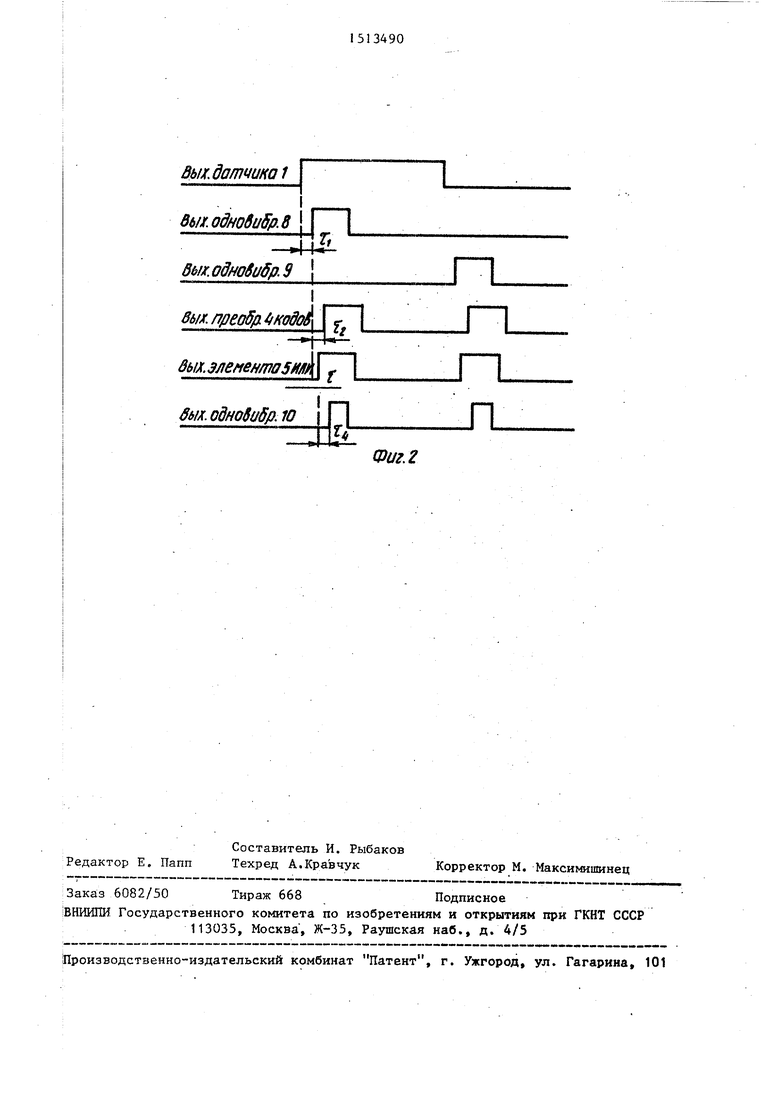
На фиг. 1 представлена функциональная схема устройства для учета перемещаемых изделий; на фиг. 2 - временная диаграьша его работы.
Устройство содержит первьй ивторой датчики 1и 2наличия.изделий,датчик3 направления движения,преобразователь 4 кодов,элемент ИЛИ 5,первьшб,второй 7, третий 8, четвертый 9 и пятый 10 одновибраторы,первьй ивторой регистры 11 и 12, счетчик 13 и блок 14 индикации.
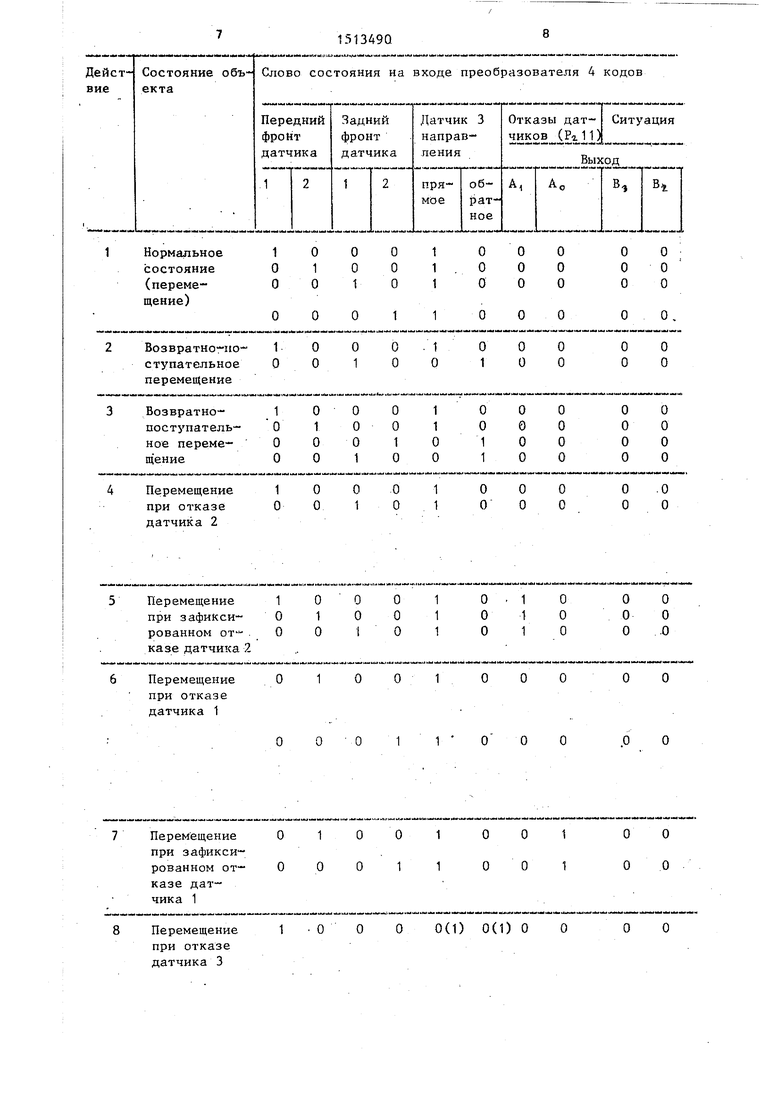
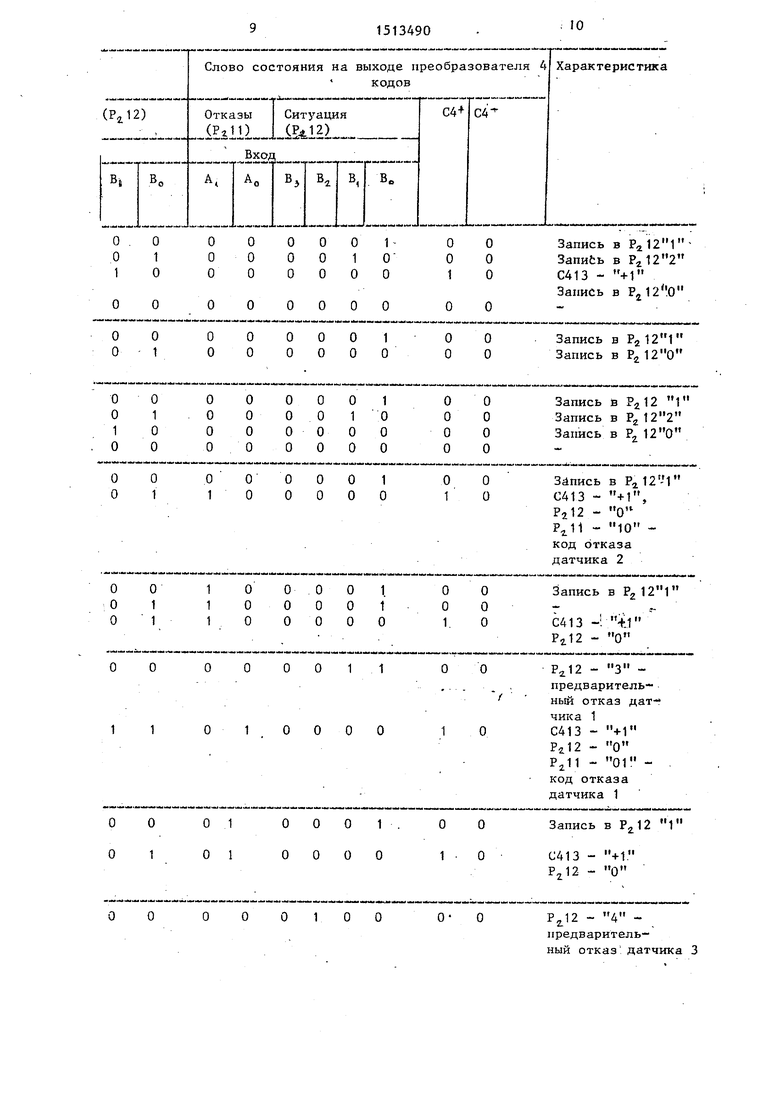
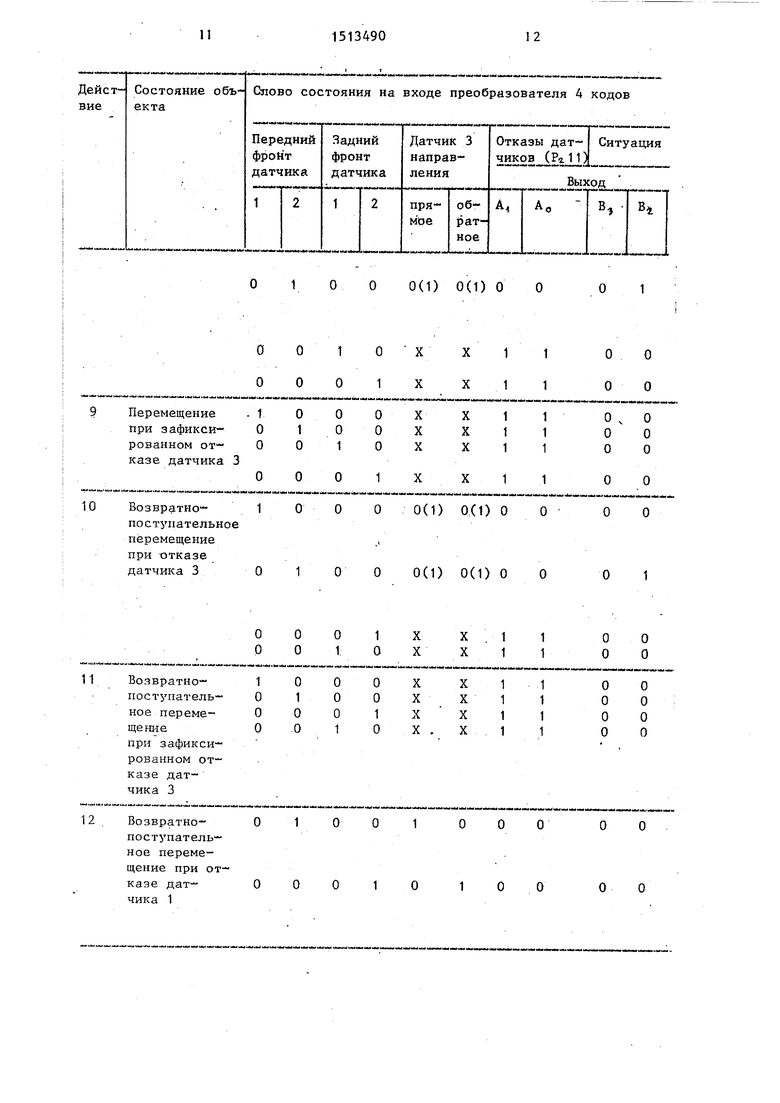
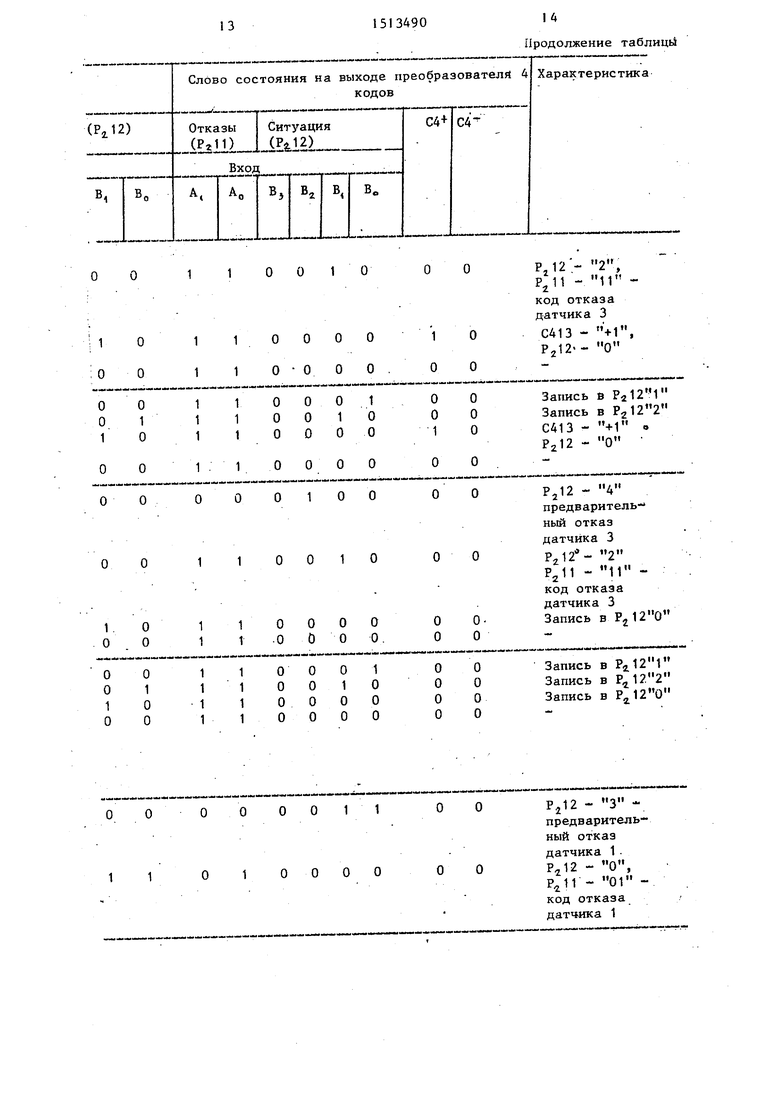
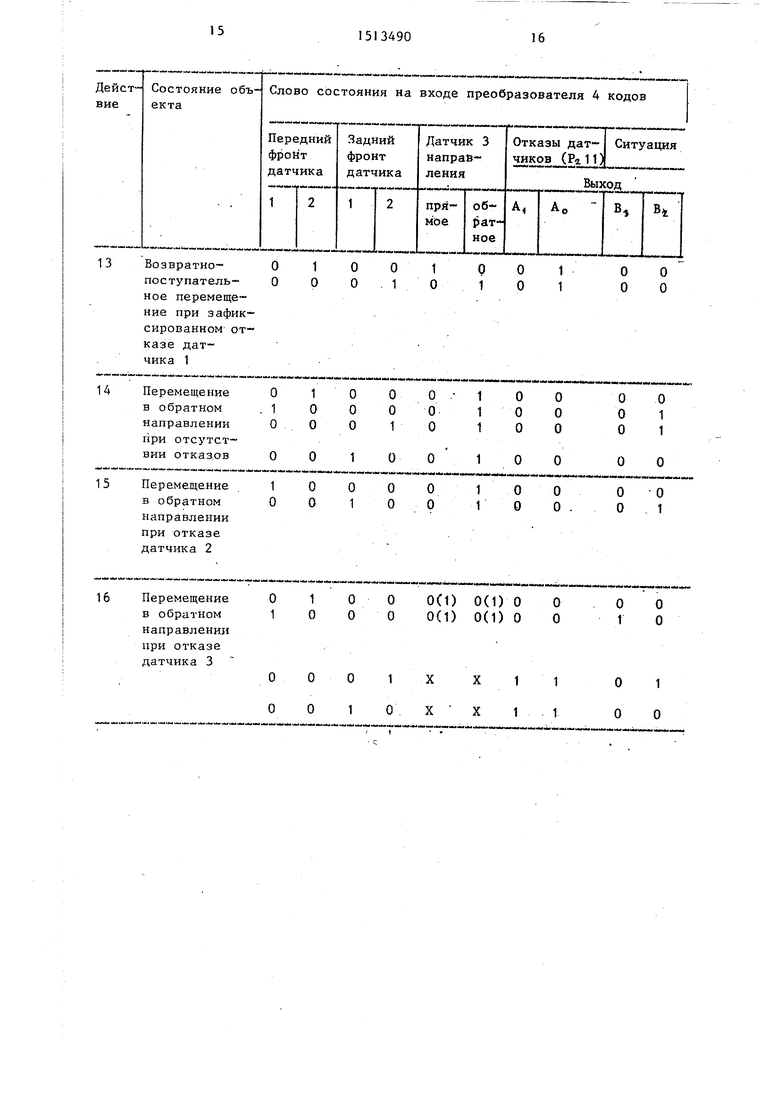
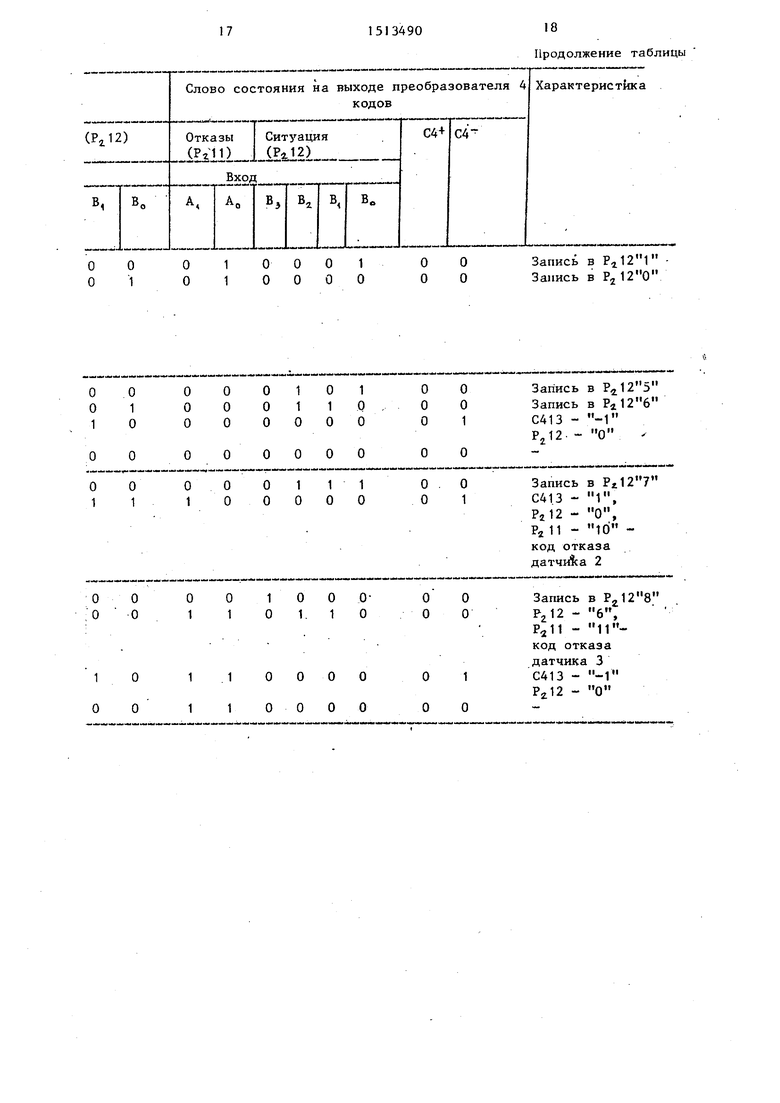
Вьтолняемый впреобразователе 4 кодов анализ и перечень реализуемых действий представлены в таблице логики.
Инициация анализа и принятия решения производится по сигналам переднего (заднего) фронта импульсов, поступающих от датчиков 1 и 2 наличия изделий
Устройство функционирует следующим образом.
При поступлении сигнала передне- го (заднего) фронта от одного из датчиков 1 и 2 в преобразователе 4 кодов производится анализ слова состояния, поступающего на его входы из датчиков 1-3 и из регистров 11 и 12. В соотнетствии с кодом слова состояния на выходе преобразователя 4 кодов вырабатывается группа сигналов, которая записывается в регистры 11 и 12 и управляет работой счетчика 13.
Синхронизация работы регистров 11 и 12 и счетчика 13 осуществляется следующим образом. При появлении, например, сигнала переднего фронта от датчика наличия изделий на выходе од новибратора 8 с задержкой , обусловленной прохождением сигнала чере элемент, появляется короткий импульс
К этому моменту на входе преобразователя 4 кодов устанавливается анализируемое слово состояния. На выходе преобразователя 4 также с задержкой по отношению к сигналу на выход одновибратора 8, обусловленной прохождением сигнала через преобразователь 4, устанавливается полученное в результате анализа текущее слово состояния, которое поступает на входы регистров 11 и 12 и счетчика 13. На выходе элемента ИЛИ 5 формируется сигнал с задержкой &j по отношению к сигналу на выходе одновибратора В На выходе одновибратора 10 с задержкой 5 4 по. отношению к выходу элемента ИЛИ 5, обусловленной прохож- дением сигнала через одновибратор, появляется короткий импульс. По заднему фронту этого имлульса сформированное на выходе преобразователя 4 кодов слово состояния записывается в регистры 11 и 12, а при наличии разрешения, поступающего с преобразователя 4,. счетчик 13 изменяет свое состояние. При этом изменяются состояния регистров 11 и 12 и, соответственно, входного и выходного (с.задержкой) слова на выходе преобразователя 4 кодов. Но, так как запись в регистры 11 и 12 и переброс счет- чика 13 производятся по заднему фронту импульса, поступающего с выхода одновибратора 10, то в момент появления измененного слова состояния на выходе преобразователя 4 оно не будет записано ни в регистры 11 и 12, ни в счетчик 13, потому что задний фронт импульса с выхода од- новибратора 10 к тому времени будет отсутствовать.
Ниже-описаны действия, реализуемые устройством в ряде ситуаций, возникаюпр1х при перемещении изделий в зоне визирования датчиков 1 и 2.
При перемещении изделия в прямом направлении и отсутствии отказов датчиков (действие.1 по таблице) по сигналам передних и задних фронтов в устройстве реализуется следующая последовательность действий: по сигналу переднего фронта датчика 1 в регистр 12 записывается код- 1, что свидетель-ствует о постзга- лении изделия в зону визирования первого датчика; по сигналу переднего фронта датчика 2 в регистр 12 записывается код 2,, свидетельству51
ющий о последовательном поступлении изделия в зону визирования датчиков
1и 2; по сигналу заднего франта датчика 1, что свидетельствует при наличии в регистре 12 записанного кода 2 о пересечении изделием зоны визирования датчика 1, т.е.
о перемещении изделия из одной контролируемой зоны в другую, в счетчик 13 добавляется единица, а в регистр 12 записывается код О.
При возвратно-поступательном перемещении изделия без пересечения зоны визирования датчика 2 при отсутствии отказов датчиков (действие
2по таблице) реализуется следующая последовательность действий: по сигналу переднего фронта датчика 1 в регистр 12 записывается код 1,
по сигналу заднего фронта датчика 1 при реверсировании перемещения изделия в регистр 12 записьшается При перемещении в прямом направлении и отказе датчика 2 (действие 4 по таблице) типа О или 1 (что равнозначно, так как наличие или отсутствие сигналов от датчиков определяется по сигналам фронтов) реализуется следующая последовательность действий: по сигналу переднего фронта датчика 1 в регистр 12 записьшается код 1, по сигналу заднего фронта датчика 1 при наличии сигнала от датчика 3, свидетельствующем о перемещении изделия в прямом .направлении, в счетчик 13 добавляется единица, в регистр 12 записьшается код О, в регистр 11 -записы- ваетсй код 3 отказа датчика 2.
При перемещении в прямом направлении и отказе датчика 3 (действие 8 по таблице) реализуется следующая последовательность действий; по сигналу переднего фрон та датчика 1 при отсутствии сигналов от датчика 3 (или наличии обоих сигналов, указывающих на то, что перемещение производится в обоих направлениях одновременно) в регистр 12 записывается код 4 - предварительный отказ датчика 3 при перемещении изделия в прямом направлении: по сигналу переднего фронта датчика 2 в регистр 12 записьшается код 2, а в регистр 11 - код 3, указьшаю- щий на отказ датчика 3; по сигналу заднего фронта датчика 1 в счетчик
20
134906
13 добавляется единица, а в регистр 12 записьшается код О.
По аналогичной схеме реализуются действия и при иных состояниях объекта, словах состояния, зафиксированных в регистрах 11 и 12 и сигналах, поступающих от датчиков 1-3.
При необходимости глубина анали- Q за ситуаций может быть повышена за счет усложнения логики преобразователя кодов.
В соответствии с указанным в таблице перечнем действий при отказе , - датчика 3 устройство обеспечивает достоверную фиксацию факта перемещения контролируемого изделия из одной зоны в другую. Таким образом, устройство позволяет повысить точность учета перемещаемых изделий.
Основным технико-экономическим преимуществом устройства является повышение точности учета перемещаемого изделия при отказах датчика - направления и,как следствие,сокращение случаев поломки оборудования,связан- . ных с поступлением в прокатные клети изделия с иными по сравнению с ожидаемыми физико-химическими параметрами. Ф о. р м у л а и 3 о б р е т е н и и 30 Устройство для учета перемещаемых изделий, содержащее первый и второй датчики наличия изделий, выходы каж- дого из которых соединены.с прямыми и инверсными входами соответственно 35 первого и второго третьего и четвертого одновибраторов, выходы которых и выходы датчика направления перемещения соединены с первой группой входов преобразователя кодов, пер- 40 вая группа выходов которого соединена
с управляющими входами счетчика и . пятый одновибратор, отличающееся тем, что, с цепью повышения точности учета подключаемых из- 45 делий, в него введены блок индикации, элемент ИЛИ, первый и второй регистры, выходы которых соединены соответственно с вторым и третьим.входами преобразователя кодов, второй и тре- 50 тий выходы которого соединены соответственно с входами первого и второго регистра, синхровходы которых подключены к синхровходам счетчика и через пятый одновибратор - к вько- 55 ДУ элемента ИЛИ, входы которого соединены с выходами первого, второго, третьего и четвертого одновибраторов, выход первого регистра подключен к входу блока индикации.
1 О О
О
1 О
о о о
о о о
о о о
о о о
о о о
о о о
0.
| название | год | авторы | номер документа |
|---|---|---|---|
| Резервированное устройство для управления перемещением объекта | 1982 |
|
SU1067468A1 |
| Устройство учета перемещаемых изделий | 1986 |
|
SU1312624A1 |
| Устройство для контроля перемещений рабочего органа машины | 1985 |
|
SU1282175A1 |
| Запоминающее устройство с коррекцией ошибок | 1987 |
|
SU1444898A1 |
| Цифровой кондуктометр | 1986 |
|
SU1374144A1 |
| Устройство управления загрузкой печи для нагрева заготовок | 1981 |
|
SU1019201A1 |
| Устройство для учета перемещающихсяиздЕлий | 1979 |
|
SU849256A1 |
| Устройство для преобразования сейсморазведочной информации | 1987 |
|
SU1497599A1 |
| Преобразователь угла поворота вала в код | 1983 |
|
SU1150638A2 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2001 |
|
RU2187884C1 |
Изобретение относится к автоматике и вычислительной технике и может найти применение в системах контроля за местоположением подвижных объектов. Целью изобретения является повышение точности учета перемещаемых изделий. Устройство для учета перемещаемых изделий содержит первый 1 и второй 2 датчики наличия изделий, датчик 3 направления движения, преобразователь 4 кодов, элемент ИЛИ 5, первый 6, второй 7, третий 8, четвертый 9 и пятый 10 одновибраторы, первый 11 и второй 12 регистры, счетчик 13 и блок 14 индикации. Основным технико-экономическим преимуществом устройства является повышение точности учета перемещаемых изделий при отказах датчика направления и, как следствие, сокращение случаев поломки оборудования, связанных с поступлением в прокатные плети изделия с иными по сравнению с ожидаемыми физико-химическими параметрами. 1 табл., 2 ил.
Возвратно-по- 1000-100000
ступательное 0010010000
переме1Цение
01001 001 00011 001
Перемещение при отказе датчика 3
1 00 О 0(1) 0(1) О О
О О
О О
О О
О О
0000
000000
1101 0000
О О
о о
Запись в P2l2.0
Pi12 - 3 - предварительный отказ дат- чика 1 С413 - +1 Pi12 - О Р.11 - 01 - код отказа датчика 1
о- о
- 4 - предварительный отказ датчика 3
Действие
Состояние объекта
О 1 00 0(1) 0(1) О О
Возвратно- поступательное перемещение при отказе датчика 1
О 1
00 0011О О
О 1 00000 О
Продолжение таблиць1
PjlZ - 3 - предварительный отказ датчика 1 .
1Г
О
- 01 код отказа датчика 1
ное перемещение при зафиксированном отказе датчика 1
О
о
о 1
о 1
1 о
о о о1. 1 о
1 О
о о
0000 00 о о
Продолжение таблицы Характеристика
Запись в Запись в Pj
в Р,,
Запись в Ра 11 II
в 11 II
Р212 - PZ 11 - to - код отказа датчрйса 2
о о
1 о
Запись в Р.
г 12 - 6, - код отказа датчика 3 С413 - -1 Р,,12 - О
Фиг. г
| Устройство для контроляМЕСТОпОлОжЕНия пЕРЕМЕщАЕМыХОб'ЕКТОВ | 1979 |
|
SU842880A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для учета перемещающихсяиздЕлий | 1979 |
|
SU849256A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
