(Л
СП
со
NU
со
31513497
отображения принятых команд. П.ель достигается тем, что в устройство для приема команд телеуправления, содержащее блок 2 приема команд, линию 1 связи, блок; 4 контроля информации, блок 3 памяти, блоки 5, 6 усилителей, блоки 10 и 11 исполнительных элементов, содержащие двух- обмоточные реле 12, 13, введены блоки д 8,9 разделительных элементов, блок
7 ключей и в каждый блок исполнительных элементов элементы И 18-20, инвертор 24, элемент 25 задержки, коммутаторы 14, 15, ограничительные элементы 21, 22, группа 16 разделительных элементов, блок 17 отображения, элемент ИЛИ 23, что обеспечивает алгоритмическое и конструктивное совмещение режимов автоматической и ручной подачи команд. 1 ил.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для приема команд телеуправления | 1982 |
|
SU1070592A1 |
| УСТРОЙСТВО ПРИЕМА КОМАНД УПРАВЛЕНИЯ | 2002 |
|
RU2237287C2 |
| Устройство для приема команд телеуправления | 1989 |
|
SU1651304A1 |
| Устройство для телеуправления и телесигнализации | 1981 |
|
SU1023381A1 |
| Устройство телеуправления и телесигнализации | 1981 |
|
SU970427A2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МОТОРНЫМИ ПРИВОДАМИ РАЗЪЕДИНИТЕЛЕЙ КОНТАКТНОЙ СЕТИ | 2004 |
|
RU2274904C2 |
| Устройство для приема команд телеуправления | 1987 |
|
SU1441436A1 |
| Релейное устройство для телеуправления и телесигнализации | 1953 |
|
SU126167A1 |
| УСТРОЙСТВО ДЛЯ АВАРИЙНОЙ СИГНАЛИЗАЦИИ И ОПОВЕЩЕНИЯ | 1992 |
|
RU2075783C1 |
| Устройство для приема команд телеуправления | 1990 |
|
SU1781687A2 |
Изобретение относится к устройствам телемеханики с временным разделением сигналов, обеспечивающим прием команд телеуправления двухпозиционными объектами. Цель изобретения - расширение функциональных возможностей путем обеспечения режима контроля, введения, кроме дистанционного, местного управления и местного отображения принятых команд. Цель достигается тем, что в устройство для приема команд телеуправления, содержащее блок 2 приема команд, линию 1 связи, блок 4 контроля информации, блок 3 памяти, блоки 5, 6 усилителей, блоки 10, 11 исполнительных элементов, содержащие двухобмоточные реле 12,13, введены блоки 8,9 разделительных элементов, блок 7 ключей и в каждый блок исполнительных элементов элементы И 18-20, инвертор 24, элемент 25 задержки, коммутаторы 14,15, ограничительные элементы 21,22, группа 16 разделительных элементов, блок 17 отображения, элемент ИЛИ 23, что обеспечивает алгоритмическое и конструктивное совмещение режимов автоматической и ручной подачи команд. 1 ил.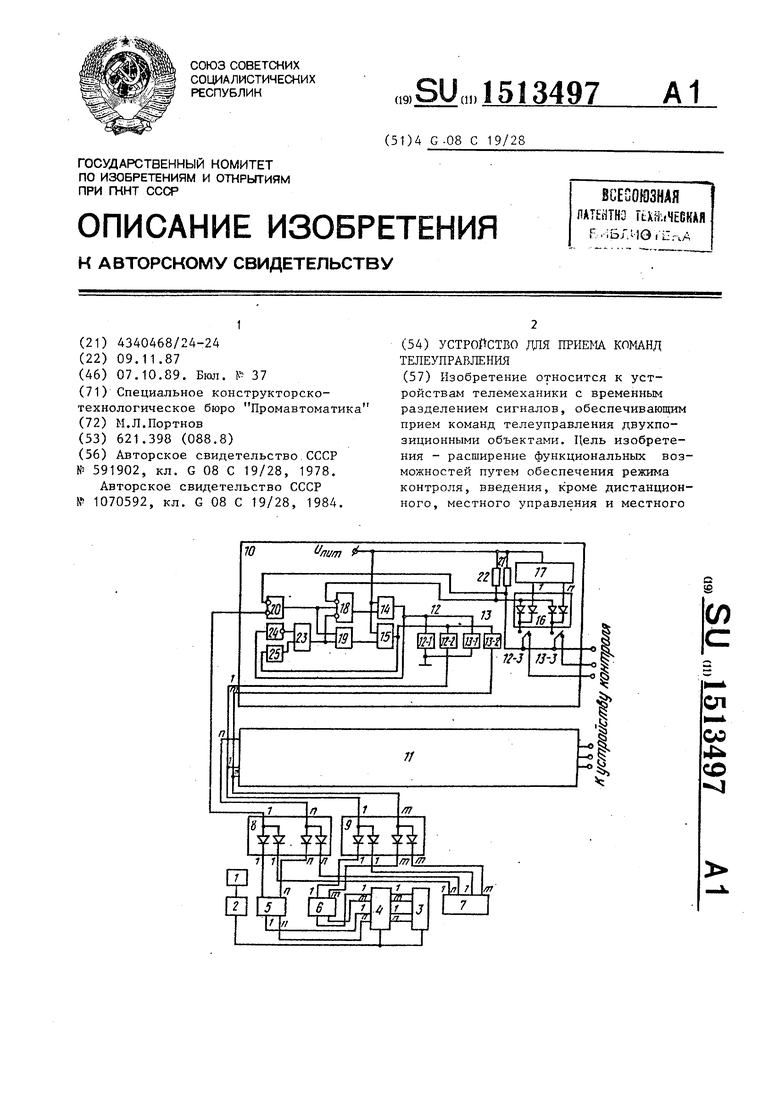
25
Изобретение относится к устройствам телемеханики с временным разделением сигналов, обеспечивающим прием команд телеуправления двухпозицион- ными объектами.
Цель изобретения - расширение функциональных возможностей путем обеспечения режима контроля, введения, кроме дистанционного 5 местного управления и местного отображения принятых команд.
На чертеже представлена блок-схема устройства.
Устройство для приема команд телеуправления содержит линию 1 связи, блок 2 приема команд, блок 3 0 памяти, блок 4 контроля информации, блоки 5 и 6 усилителей, блок 7 ключей, блоки 8 и 9 разделительных эле- ментов, блоки 10 и 11 исполнительных элементов, каждый из которых состоит 35 из двухобмоточных реле 12 и 13, с обмотками 12-1, 12-2, 13-1, 13-2 и контактами 12-3 и 13-3, кoмl гyтaтopы 14 и 15, группы разделительных элементов 16, блока 17 отображения, элемен-40 тов Н 18-20, ограничительных элементов 21 и 22, элемента ИЛИ 23, инвертора 24 н элемента 25 задержки.
В представленном для примера на черт-еже варианте устройства показано, 45 что число групп объектов равно п, а число объектов телеуправления в груп- пе - т. Указанные числа могут задаваться произвольно, в реально выполненном варианте устройства , .JQ Для упрощения чертежа показано два блока исполнительных элементов (10 и 11), в каждом из них - только два вьтодных реле 12 и 13. Очевидно, что число бтЕоков 10 и 11 может быть рав- с но п, а число реле 12 и 13 - т.
Контакты реле 12 и 13, используемые для коммутации исполнительных органов,, не показаны.
5
0 5 0
5 JQ с
Устроргство работает следующим образом.
Последовательный код команды, синхронизирующие и защитные разряды поступают из линии связи на блок 2, который отделяет информационную часть кода от синхронизирующей, обеспеч - вает подавление относительно слабых помех и формирует сигналы, поступающие на блоки 3 и 4. В соответствии с принятым видом помехозащитного кода блок 4 проверяет отсутствие искажений и разрещает передачу преобразо- в анного в параллельную форму и хранимого блоком 3 кода на выход, т.е. на блоки 5 и 6. Например, если для защиты информации от помех в линии связи использован циклический код, блок 4 представляет собой декодер циклического кода, определяющий остаток от деления принятой кодовой последовательности на образующий полином. Если остаток равен нулю, блок 4 ретранслирует сигналы от блока 3 на блоки 5 и- 6 и, при необходимости, формирует сигнал-квитанцию для передачи через блок 2 в линию связи, подтверждающую прием команд ы„
Блок 3, кроме преобразования последовательного кода в. параллельный, разделяет приня тый код команды на две составляющие - сигналы адреса 1«..п группы объектов и адреса 1 . , .т объектов телез правления в группе . Разделение команд по групповой принадлежности позволяет строить устройство по модульному принципу, наращивая объем, аппаратуры по мере необходимости увелш -гения числа команд ,
Рассмотрим вначале режим приема команд только из линии связи. Разрешающий сигнал номера группы от блока 5 через один из диодов группы 8 пос5 15
тупает на вход элемента И 20 соответствующего блока 10 и 11. На второ вход элемента И 20 разрешающий сигнал (нулевого уровня) поступает от элемента 21, подключенного к объединенным средним выводам переключающих контактов 12-3, 13-3 реле 12 и 13. Этот вывод должен быть подключен к общей шине внешнего блока дистанционного контроля принятой команды (т.е. состояния реле 12 и 13). Если соединение средних выводов контактов 12-3 и 13-3 с блоком контроля отсутствует управление реле 12 и 13 должно быть запрещено, так как их состояние не контролируется автоматически. В этом случае от резистора 21 на вход элемента И 20 подается запрещающий сигнал (уровнем логической 1). Таким ,образом, элемент И 20 образует выходной сигнал 1, если на него подаетс сигнал управления от блока 5 и при этом подключен блок дистанционного контроля принятых команд. Выходной сигнал 1 с выхода И 20 подается на входы элементов И 18 и 19. На второй вход элемента И 18 подается сигнал от элемента 22, подключенного к объединенным анодами диодам группы 16. Логический уровень сигнала на втором входе элемента И 19 определяется положением контактов 12-3 и 13-3 реле 12 и 13. Если хотя бы одно из реле находится во включенном состоянии, соответствующий ему кон- .такт 12-3 и 13-3 переведен в положение, противоположное показанному на ч-ертеже. При этом уровень логическог сигнала - О, а элемент И 18 деблокирован. В результате на выходе элемента И 18 образуется сигнал 1, переводящий коммутатор 14 в рабочее состояние. Коммутатор при этом обеспечивает передачу на выход напряжения питания ( ) Коммутатор может быть выполнен на электромагнитном реле или на бесконтактном ключе.Сигнал от коммутатора 14 поступае через инвертор 24 и элемент ИЛИ 23 на И 19, блокируя его работу. В то же время от коммутатора 14 подается напряжение питания на первые обмотки 12-1 и 13-1 реле 12 и 13. Сигналами в обмотках 12-1 и 13-1 реле переводится в выключенное состояние.
Когда все реле окажутся выключенными, одновременно перейдут в положение, показанное на чертеже, контакты
497
12-3 и 13-3. В результате от элемента 22 на вход (инвертирующий) элемента И 18 поступает сигнал 1, блокирующий выдачу им сигнала 1, обмотки 12-1 и 13-1 обесточиваются. Одновременно сигнал 1 образуется на выходе инвертора 24 и элемента ИЛИ 23, благодаря чему сигнал 1 образуется на выходе
0 элемента И 19 (сигнал 1 на вход элемента И 19 подается также от элемента И 20). Коммутатор 15 переводится в рабочее состояние, передавая на выход напряжение от источника питания
5 (и пит). Этим сигналом (до момента снятия сигнала управления от блока 5), поступающим на вход элемента ИЛИ 23 через элемент 25 задержки, поддерживается рабочее состояние коммутатора
0 15. Сигнал от коммутатора 15 подается на обмотки 12-2 и 13-2 реле 12 и 13. Реле сигналами в этих обмотках переводятся во включенное состояние в соответствии с сигналами от блока 6
5 усилителей, т.е. в зависимости от принятых сигналов адреса объектов телеуправления в группе (сигналы от блока 6 на реле подаются через диоды группы 9). Включенное состояние реле
0 12 и 13 удерживается и после снятия сигналов управления с обмоток 12-2 и 13-2.
Чтобы исключить повторную передачу сигналов на обмотки 12-1 и 13-1 (при установке какого-либо реле во включенное состояние) на третий (инвертирующий) вход элемента И 18 подается сигнал от элемента ИЛИ 23. В начале процесса управления реле (на
Q этапе предварительного отключения всех реле по сигналу от коммутатора 14) сигнал блокировки элемента И 18 от элемента ИЛИ 23 отсутствует - в результате вначале (если хотя бы одно реле во включенном состоянии) в рабочем состоянии оказывается коммутатор 14, затем - коммутатор 15, после чего повторная работа коммутатора 14 запрещается и реле удерживаются в соответствии с принятой командой. Элемент 25 задержки препятствует защелкиванию коммутатора 15 в рабочем состоянии, когда в начале цикла управления из-за задержек в работе логических элементов схемы кратковременно сигнал на выходе ком- - мутатора 14 оказывается нулевым.
Для предотвращения сбоев в работе схемы в переходных режимах величина
5
5
0
5
задержки, вносимая элементом 25, должна быть больше времени установления рабочего уровня сигнала на выходе коммутатора 14, но меньше времени установки нового состояния реле. В связи с тем, что указаннью времена различаются на несколько порядков (мкс и мс).легко выполняется отмеченное условие нормальной работы. Важно подчеркнуть, что показанные контакты 12-3 и 13-3 реле 12 и 13 используются для контроля за работой реле, а также для целей выдачи сигналов для внешнего (не показанного) блока дистанционного контроля.
Информационные сигналы на внешний блок дистанционного контроля подаются от объединенного среднего вывода и от индивидуальных замыкающих контактов 12-3 и 13-3 всех реле.
С помощью элементов 16 информационные си1 налы от замыкаю1 1;их кон- Тактов 12-3 и 13-3 всех реле разделяются и используются для управления работой коммутатора 14 и в качестве входных для блока 17 отображения. В нем, например, могут использоваться индивидз альные для калсдого реле светодиодные индикаторы, подключенные через ограничивающие резисторы . к шине источника питания ( дикаторы обеспечивают возможность местного визуального контроля установленного состояния реле, т.е. принятых команд.
Кроме показанных на чертеже контактов 12-3 и 13-3, другие (не показанные) контакты этих pexie используются для непосредственной коммутации исполнительных органов (пускателей, переключателей каналов связи, информационных табло, датчиков измеряемых параметров и т.д.).
Важной характеристикой предлагаемого ycTpofi:cTBa является возможность ручной подзчи команд от местного за- датчика с использованием методов контроля и аппаратуры, задействованной в рассмотренном выше режиме автоматического приема и обра.ботки команд из линии связи.
Рассмотрим работу устройства в режиме ручкой подачи команд.
Для целей ручной подачи используется блок 7 ключей, содержащий, например, iri арретирных кнопок по числу сигнллов адреса объектов управления в группе и от 1 до п неарретир ных кнопок для задания кратко- временньк сигналов адресов групп объектов, причем сигналы адресов объектов управления в группе формируются только при нажатии любой неарретирной кнопки задания группы объектов. Время подачи сигналов руч- .ной подачи команд ограничивается
снизу временем предварительного отключения реле блоков 10 и 11 и последующего включения реле в соответствии с вновь заданной командой, т.е. составляет несколько киллисекунд.. В
связи с тем, что время подачи сигналов сверху не ограничивается, специальные меры по формированию временных параметров сигналов блока 7 могут не приниматься, что позволяет максимально упростить блок 7, ограничившись установкой в нем указанного -Набора арретирных и неарретирных кнопок. Ориентируясь на индицируемое блоком 17 состояние реле, оператор задает
с помощью арретирных кнопок блока 7 требуемое новое состояние всех реле одного из блоков 10 и 11, а затем кратковременно нажимает на арретир- ную кнопку блока 7, соответствующую
выбранной группе обт ектов, т.е. одному из блоков 10 и 11.
Через блоки 8 и 9 сформированные блоком 7 сигналы направляются на те же. цепи, что и сигналы от блоков
4, 2 и 3, поэтому дальнейшая работа устройства аналогична рассмотренной выше для режима автоматического приема команд. По вновь установленному состоянию индикаторов блока 17 оператор может контролировать исполнение поданных команд; дистанционный контроль принятых команд, как и в режиме автоматического приема, проводится внешним блоком по информационным
сигналам от размьп ающи:с контактов реле.
Таким образом, благодаря рассмотренному построению устройства, режимы автоматической и ручной подачи ко
манд совмещены алгоритмически и конструктивно, причем в обоих режимах при сохранении, контроля отсутствия искажений принятой команды помехами в линии связи и из-за неисправности аппаратуры дополнительно обеспечивается проведение местного (визуального) н дистанционного (автоматического) контроля принятых команд. Этим-дос915
тигаются преимущества предлагаемого устройства по сравпению с известным.
Формула изобретения Устройство для приема команд телеуправления, содержащее блок приема команд, вход которого соединен с выходом линии связи, выход - с входами блока контроля информации и блока памяти, выходы первой и второй групп которого соединены с одноименными входами первой и второй групп блока контроля информации, выходы первой .и второй групп которого подключены соответственно к входам первого и вто рого блоков усилителей, по числу объектов управления блоки исполнительных элементов, состоящие из двух- обмоточнык реле, отличающееся тем, что, с целью расширения функциональных возможностей путем обеспечения режима контроля, в него введены блоки разделительных элементов, блок ключей и в каждый блок исполнительных элементов - элементы И, инвертор, элемент задержки, коммутаторы, ограничительные элементы, блок отображения и группа разделительных элементов, выходы первой и второй групп блока ключей соединены с одноименными входами первой группы соответственно первого и второго блоков разделительных элементов, входы второй группы которых соединены с выходами соответственно первого и вто- .рого блоков усилителей, выходы первого блока разделительных элементов соединены соответственно с первыми входами первых элементов И одноименных блоков исполнительных элементов, выходы второго блока разделительных элементов соединены с первыми выводами первых обмоток первого и второго двухобмоточных реле одноименных бло-
0
3
0
349710
ков исполнительных элементов, выход первого элемента И в каждом блоке исполнительных элементов соединен с первыми входами второго и третьего элементов И, выходы которых подключены к первым входам соответственно первого и второго коммутаторов, первые ВЫВОДЫ вторых обмоток первого и второго двухобмоточных реле подключены к ншне нулевого потенциала, выход первого коммутатора соединен с объединенными вторыми выходами вторых обмоток первого и второго двухобмоточных реле и через инвертор с первым входом элемента РШИ, выход второго коммутатора подключен к объединенным вторым выводам первых обмоток первого и второго двухобмоточных реле и через элемент задержки к второму входу элемента ИЛИ, выход которого подключен к вторым входам второго и третьего элементов И, вторые входы первого и второго коммутаторов объединены с входом блока отображения и подключены к клемме источника питания, выходы блока отображения соединены с соответствующими первыми входами разделительных элементов группы, выходы которых являются первыми неподвижными выв одами контактов первого и второго двухобмоточных реле, в.торые неподвижные выводы контактов и объединенные подвижные выводы контактов которых являются вы- ,ходами устройства, клемма источника питания подключена через первый ограничительный элемент к третьему входу второго элемента Ник объединенным вторым входам разделительных элементов группы и через второй ограничительный элемент - к второму входу первого элемента И и к объединенным подвижным выводам контактов первого и
с второго двухобмоточных реле.
5
0
5
0
| Устройство для приема команд телеуправления | 1976 |
|
SU591902A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Устройство для приема команд телеуправления | 1982 |
|
SU1070592A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
