Изобретение относится к пищевой промышленноети, в частности к способам управления технологическим оборудованием пищевой промьшшенности, и предназначено для управления технологическими процессами дозирования рыбных консервов и пресервов рыбонаби- вочными машинами типа ИНА.
Целью изобретения является повышение точности дозирования.
Способ заключается в том, что рассчитывают среднее значение и дисперсию фиксированного количества последовательно идущих доз по массе, подсчитывают число выходов каждой из зтих величин подряд за допустимые, заранее устакопленные пределы и при
достижении числа выходов средней массы определенного, заранее заданного значения, дают сигнал на подналадку дозатора, с помощью которого происходит грубая регулировка масс последующих доз продукта; при достижении критического числа выходов подряд средней дисперсии изменяют частоту вибрации механизма подачи набивочной машины, уменьшая разброс массы доз и приближая среднюю массу дозы к номинальному значению.
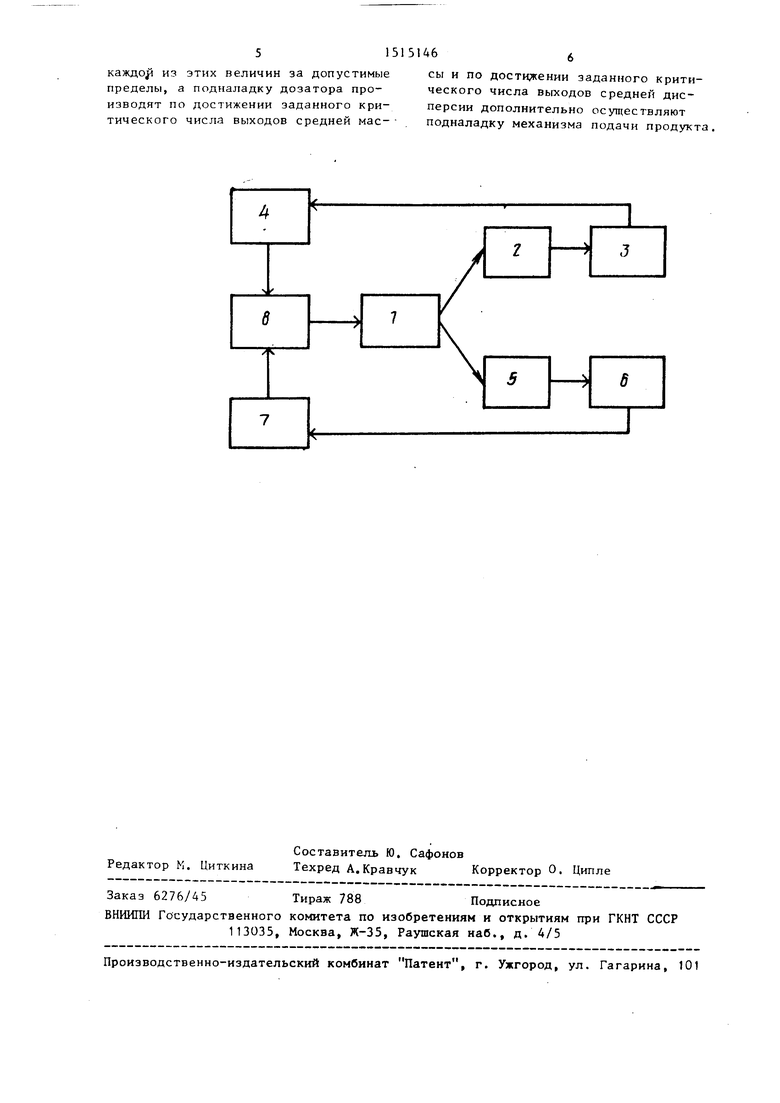
На чертеже представлена структурная схема устройства, реализующего данный способ.
Устройство содержит вычислительный блок 1 для расчета значения
сл ел
а
315
СКОЛЬЗЯЩЕ средней и скользящей дисперсии, элемент 2 сравнения скользящей средней с нижним и верхним пределами допустимого разброса массы доз, вычислительный блок 3 для подсчета количества выходов скользящей средней за допустимые пределы и выработки команды на устранение систематической погрешности, исполнительный механизм 4, элемент 5 сравнения, скользящей дисперсии с предельным допустимым значением дисперсии массы дозы, вычислительный блок 6 для подсчета количества выходов скользящей дисперсии за допустимый предел и выработки команды на исправление случайной погрешности, исполнительный механизм 7, объект 8 управления. Входными сигналами являются номинальная масса дозы, значения верхнего и нижнего пределов допустимого разброса массы доз, предельное значение допустимой дисперсии массы доз сигнальное значение количества выходов подряд средней массы и дисперсии за допустимые пределы и масса очередной дозы продукта в банке. Скользящая средняя масса X (- последних доз вычисляется по формуле
x..
j j i-L-H где Xj - масса очередной дозы;
L - количество доз, по которым
ведется расчет; i - номер последнеГ; дозы-.
Скользящая дисперсия S , вычис- ляется по формуле
s . Z (Xj-X,,,)V(L-l).
j i-Li-l
На пульте управления перед началом процесса дозирования устанавливаются значения: номинальной массы дозы, массы пустой банки, верхнего и нижнего пределов допустимого разброса массы, предельного значения допустимой дисперсии и сигнального значения количества выходов подряд за допустимые пределы. Пустая и очищенная тара подается в набивочную машину, которая дозирует рыбу и передает заполненные банки на взвешивающую карусель высококонтрольного автомата ИНА 107. Формируемые этим ав64
томатом сигналы, пропо1ми1(нальные массе каждой дозы, пс1сту11ают в вычислительный блок , рассчитывающий значения скользящей средней и скользящей дисперсии. Вычисленные значения сравниваются с допустимыми пределами в элементах сравнения 2 и 5 соответственно, и подсчитывается количество
выходов подряд каждого параметра за эти пределы в вычислительных блоках 3 и 6 соответственно. В случае выхода значения скользящей средней за допустимые пределы К и более раз подряд
вырабатывается команда на исполнительный механизм 4, изменяющий высоту подъема подвижного копира дозатора набивочной машины, что вызывает изменение массы следующих доз рыбы. При
превышении скользящей дисперсией допустимого значения К и более раз подряд значений, не превышающих допустимое, вырабатьюается команда на исполнительный механизм 7, изменяющий
передаточное отношение вариатора вибратора, управляющего частотой вибрации механизма подачи набивочной машины. Увеличение частоты вибрации при- к уменьшение разброса массы доз
рыбы. Уменьшение частоты вибрации после стабилизации значения скользящей дисперсии в допустимых пределах необходимо для улучшения условий ра- ботм персонала и технолот ического
оборудования, а также для предотвращения чрезмерного уплотнения дозы.
Применение предлагаемого способа управления дозированием позволит снизить перерасход сырья и повысить точность дозирования.
Формула изобретения
Способ управления процессом дози- рования пищевых продуктов набивочными машинами, предусматривающий контролирование массы дозы, определение сред - него значения массы дозы, его сравнение с заданным значерп1ем и подналад- ку дозатора набивочной машины, о т - л и ч а ю щ и и с я тем, что, с целью повьш1ения точности дозирования, дополнительно определяшт дисперсию фиксированного количества последовательно поступающих доз по массе, устанавливают допустимые пределы указанных величин, ос тцествляют сравнение с этими допустимыми пределами и подсчитывают число выходов подряд
каждо|1 из этих величин за допустимые пределы, а подналадку дозатора производят по достижении заданного критического числа выходов средней мае-
сы и по достидении заданного критического числа выходов средней дисперсии дополнительно осуп(ествляют подналадку механизма подачи продукта
| название | год | авторы | номер документа |
|---|---|---|---|
| Линия для производства пресервов из разделанной рыбы | 1990 |
|
SU1824151A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ РЫБЫ В РЫБОВОДЫ НАБИВОЧНОЙ МАШИНЫ | 1994 |
|
RU2093034C1 |
| СПОСОБ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ПРОЦЕССОМ ДОЗИРОВАНИЯ ПИЩЕВОЙ ПРОДУКЦИИ | 1993 |
|
RU2111523C1 |
| УСТРОЙСТВО ДЛЯ ДОЗИРОВАНИЯ ВЯЗКИХ ЖИДКОСТЕЙ И ДИСПЕРСИЙ | 1992 |
|
RU2019286C1 |
| Способ управления процессом порционного дозирования сыпучих материалов | 1986 |
|
SU1416948A1 |
| Устройство для автоматической подналадки обьемного дозатора и отбраковки дефектной по массе продукции | 1974 |
|
SU524976A1 |
| Способ автоматизированного управления системой выпоечных аппаратов и устройство для его осуществления | 1987 |
|
SU1604289A1 |
| Устройство для дозирования в консервные банки жидких продуктов | 1980 |
|
SU1070430A1 |
| Способ управления рабочим циклом поперечной подачи при шлифовании и устройство для его осуществления | 1985 |
|
SU1316800A1 |
| СПИРАЛЬНО-ШНЕКОВЫЙ СМЕСИТЕЛЬ-РАЗБРАСЫВАТЕЛЬ МИНЕРАЛЬНЫХ УДОБРЕНИЙ | 2003 |
|
RU2244395C1 |
Изобретение относится к управлению технологическими процессами в пищевой промышленности. Цель изобретения - повышение точности дозирования. Способ управления процессом дозирования предусматривает контролирование массы доз продукта, подналадку дозатора и изменение частоты вибрации механизма подачи набивочной машины, для чего определяют среднее значение и дисперсию фиксированного количества последовательно поступающих доз по массе, сравнивают полученные значения с допустимыми пределами и подсчитывают число выходов подряд каждой из этих величин за допустимые пределы. 1 ил.
| Граф В.А., Рогов Н.А., Стегали- чев Ю.Г., Фрезоргер А.Д | |||
| Автоматизированные системы управления технологическими процессами в мясной и молочной промьшленности | |||
| М.: Агро- промиздат, 1985, с | |||
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
