i
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер для подготовки яхтсменов | 1987 |
|
SU1515184A1 |
| Способ определения скорости парусного судна, установленного на тренажере | 1987 |
|
SU1459676A1 |
| Способ имитации момента аэродинамической силы парусного вооружения | 1989 |
|
SU1723570A1 |
| ПАРУСНОЕ СУДНО | 1997 |
|
RU2178756C2 |
| ПАРУСНОЕ СУДНО | 2002 |
|
RU2265546C2 |
| Измерительное устройство гидродинамического лага | 1980 |
|
SU901909A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДОВ | 2005 |
|
RU2277495C1 |
| Система автоматического управления судном | 1980 |
|
SU948772A1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| Шпринтовое парусное вооружение | 1985 |
|
SU1318486A1 |
Изобретение относится к способам реализации условий тренировки яхтсменов на берегу. Целью изобретения является приближение динамических характеристик управления парусным судном к реальным. Для этого парусное судно 17 устанавливают на тензоплатформу, имеющую возможность вращаться вокруг вертикальной оси парусного судна, и прикладывают к корпусу парусного судна силу, совпадающую по величине и направлению с силой тяги парусного вооружения, измеряют на выходе тензодатчиков 1 и 2 тензоплатформы сигналы, пропорциональные продольной и боковой составляющим силы тяги, интегрируют эти сигналы, после чего возводят в квадрат и суммируют. На выходе сумматора 9 получают сигнал, пропорциональный квадрату линейной скорости парусного судна 17, который с весами пропорциональными соответственно продольному и боковому коэффициентам гидродинамического сопротивления корпуса суммируют на сумматорах 3 и 4 с сигналами, поступающими с соответствующих тензодатчиков 1 и 2 продольной и боковой составляющих силы тяги, отклоняют руль парусного судна, измеряют угол этого отклонения относительно диаметральной плоскости парусного судна, при этом измеряют текущий угол отклонения разворота корпуса относительно неподвижного основания, дифференцируют его по времени, и с весом, пропорциональным гидродинамическому коэффициенту демпфирования корпуса парусного судна в воде, суммируют с сигналом, пропорциональным измеренному текущему углу отклонения руля с весом, соответствующим коэффициенту гидродинамической эффективности руля, после чего, суммарный сигнал умножают на сигнал, пропорциональный квадрату линейной скорости судна. Результирующий сигнал преобразовывают в пропорциональный ему управляющий ток реверсивного поворотного электродвигателя, установленного на неподвижном основании, которым создают управляющий момент, пропорциональный управляющему току, и разворачивают корпус парусного судна в положение, при котором момент электродвигателя уравновесится моментом от действующей на корпус судна силы, эквивалентной силе тяги парусного вооружения. 1 ил.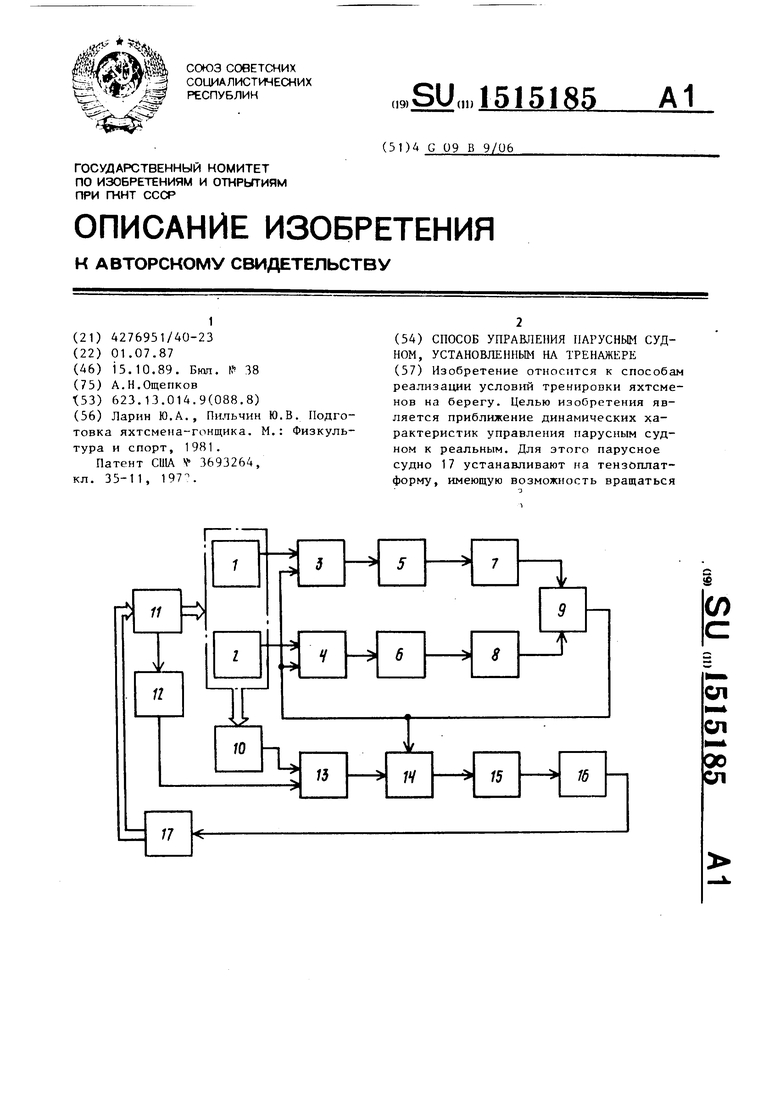
LZ 17
ел
СП
00
ел
вокруг вертикальной оси парусного судна, и прикладывают к корпусу парусного судна силу, совпадающую по величине и направлению с силой тяги парусного вооружения, измеряют на выходе тензодатчиков 1 и 2 тензоплат- формы сигналы, пропорциональные продольной и боковой составляющим силы тяги, интегрируют эти сигналы, после чего возводят в квадрат и суммируют. На выходе сумматора 9 получают сигнал пропорциональный квадрату линейной скорости парусного судна 17, которьм с весами пропорциональными соответ.ст- венно продольному и боковому коэффициентам гидродинамического сопротивления корпуса суммируют на сумматорах 3 и 4 с сигналами, поступающими с соответствующих тензодатчиков 1 и 2 продольной и боковой составляющих ,силы тяги, отклоняют руль парусного судна, измеряют угол этого отклонения относительно диаметральной плоскости парусного судна, при этом измеря- ют текущий угол отклонения разворота
Изобретение относится к способам реализации условий тренировки яхтсменов на берегу.
Целью изобретения является приближение динамических характеристик управления парусным судном к реальным.
На чертеже представлена схема устройства для осуществления предлагаемого способа.
Устройство содержит первый тензо- датчик 1, второй тензодатчик 2, пер- вый сумматор 3, второй сумматор 4, первьй интегратор 5, второй интегратор 6, первый квадратор 7, второй квадратор 8, третий сумматор 9, датчик 10 углового положения руля, дат- чик 11 углового положения корпуса, блок 12 дифференцирования, четвертый сумматор 13, блок 14 умножения, усилитель-преобразователь 15, реверсивный электродвигатель 16.
На чертеже пунктиром обозначена тензоплатформа с установленным на не парусным судном 17, имеющая возможность вращения вокруг его вертикальн оси.
Спскюб осуществляют следующим образом.
При воздействии на парусное вооружение ветрового потока на корпусе па
корпуса относительно неподвижного основания, дифференцируют его по времени, и с весом, пропорциональным гидродинамическому коэффициенту демпфирования корпуса парусного судна в воде, суммируют с сигналом, пропорциональным измеренному текущему углу отклонения руля с весом, соответствующим коэффициенту гидродинамической эффективности руля, после чего, суммарный сигнал умножают на сигнал, пропорциональный квадрату линейной скорости судна. Результирующий сигнал преобразовывают в пропорциональный ему управляющий ток реверсивного поворотного электродвигателя, установленного на неподвижном основании, которым создают управляющий момент, пропорциональный управляющему току, и разворачивают корпус парусного судна в положение, при котором момент электродвигателя уравновесится моментом от действующей на корпус судна силы, эквивалентной силе тяги парусного вооружения. 1 ил.
1
5
0 5 д
5
русного судна возникают продольная и поперечная составляющие силы тяги, измеряемые соответственно первым 1 и вторым 2 тензодатчиками, сигналы с их выходов, пропорциональные соответствующим ускорениям корпуса, интегрируются в интеграторах 5 и 6, возводятся в квадрат в квадраторах 7 и 8 и суммируются, в сумматоре 9 реализуется сигнал, пропорциональный квадрату линейной скорости V парусного судна. Сигнал с выхода датчика 10 углового положения руля с весом, пропорциональным гидродинамическому коэффициенту эффективности руля, суммируется с сигналом, поступающим в сумматор 13 через блок 12 дифференцирования с выхода датчика 11 углового положения корпуса, с весом, пропорциональным коэффициенту гидродинамического демпфирования корпуса. Суммарный сигнал с весом, пропорциональным площади смоченной поверхности корпуса S, и конструктивному коэффициенту корпуса К, плотности воды р , умножается в блоке 14 умножения на сигнал, пропорциональный квадрату линейной скорости парусного судна V. Результирующий сигнал в усилителе- преобразователе 15 преобра:)уется в
515
управляющий ток реверсивного электро- двига теля 16, который реализует на своем валу момент, пропорциональный сумме моментов: управляющего 1Ц и демпфирующего Мд, действующих на корпус парусного судна со стороны водной среды. Момент электродвигателя разворачивает корпус судна вокруг вертикальной оси до положения, при котором этот момент уравновесится моментом, действующим на корпус парусного судна со стороны парусного вооружения.
Формула изобретения
Способ управления парусным судном, установленным йа тренажере, заключающийся в том, что парусное судно устанавливают на тензоплатформе с возможностью вращения вокруг его вертикальной оси, прикладьшают к корпусу парусного судна силу, повпадающую по величине и направлению с силой тяги парусного вооружения, определяют квадрат линейной скорости парусного судна для чего измеряют сигналы, пропорциональные величинам продольной и боковой составляющих силы тяги, интегрируют их, возводят в квадрат и суммируют их, затем полученный сигнал суммируют с сигналами составляющих силы тяги, после этого отклоняют руль
Редактор Ю.Середа
Составитель Г.Заваркина
Техред л.Олийиык Корректор А.Обручар
Заказ 6279/47
Тираж 469
ВНИИПИ Государственного комитета .по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
56
направления парусного судна относительно его диаметральной плоскости, измеряют величину угла этого отклонения, преобразуют сигнал, пропорциональный величине измеренного угла, в управлякщий ток реверсивного поворотного электродвигателя, с помоцью которого создают управляющий момент,
пропорциональный управляющему току, и разворачивают корпус парусного судна вокруг вертикальной оси отличающийся тем, что, с целью приближения динамических характеристик- ,управления парусным судном к реальным, измеряют текущий угол разворота корпуса парусного судна вокруг его вертикальной оси относительно неподвижного основания, дифференцируют его по времени и получают сигнал, пропорциональный скорости разворота, изменяют его пропорционально коэффициенту гидродинамического демпфирования корпуса парусного судна, суммируют полученный сигнал с
сигналом, пропорциональным углу от- клонения руля направления, и коэффициент гидродинамической эффективности руля, полученную сумму умножают
на квадрат линейной скорости парусного судна, результирующий сигнгш реобразуют в пропорциональный ему правляющий ток реверсивного повоотного электродвигателя.
Подписное
| Ларин Ю.А., Пнльчин Ю.В | |||
| Подготовка яхтсмена-гонщика | |||
| М.: Физкультура и спорт, 1981 | |||
| Патент США N° 3693264, кл | |||
| Скоропечатный станок для печатания со стеклянных пластинок | 1922 |
|
SU35A1 |
