1
Изобретение относится к судостроению.
Известна система автоматического управления судном, принимающим груз с передающего судна при траверзной грузопередаче, содержащая последовательно соединенные сумматор, блок управления, и исполнительный механизм 1 .
Недостатком такой системы является недостаточная точность отслеживания судном заданной траектории. Цель изобретения - повышение точности
удержания судна на заданном расстоянии относительно траектории, задаваемой передающим судном.
Для этого система снабжена устройством on,j ределения поперечного смещения центра управления судна от заданной траектории, устройством определения разворачивающего момента судна от усилия канатной дороги, устройством .определения силы гидродинамического взаимодейст- 20 ВИЯ между принимающим и передающим судами и датчиками углов поворота рулей направления этих судов, причем выходы устройств и датчиков подключены к входам сумматора;
Устройство определения поперечного смещения центра управления судна от заданной траектории выполнено из последовательно соединенных первого сумматора, блока умножения и второго сумматора, выход которого является выходом устройства, к входам первого сумматора подключены датчики курсовых углов судов, к второму входу блока умножениявыход блока переменной уставки, а к второму входу второго су тматора - блок опре10деления поперечного смещения.
Устройство определения разворачивающего момента судна от усилия канатной дороги выполнено из блока умножения, входы которого соединены соответственно с выходами блока переменной уставки и датчика усилия канатной дороги, а выход является выходом устройства.
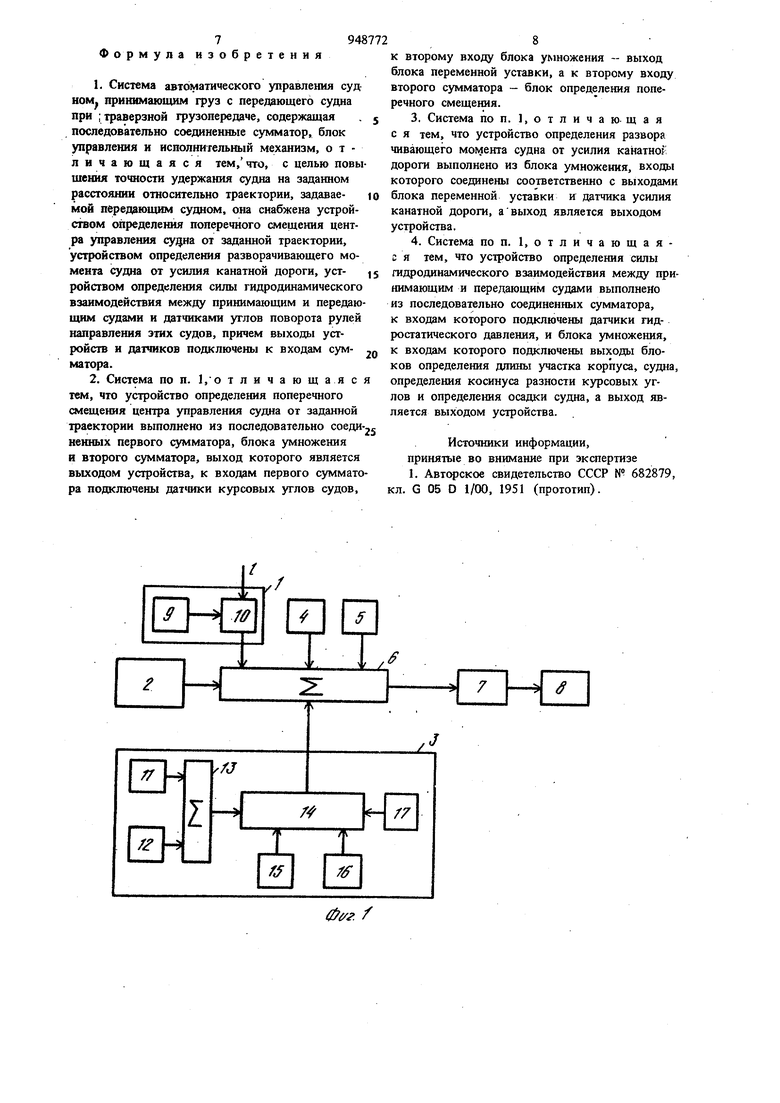
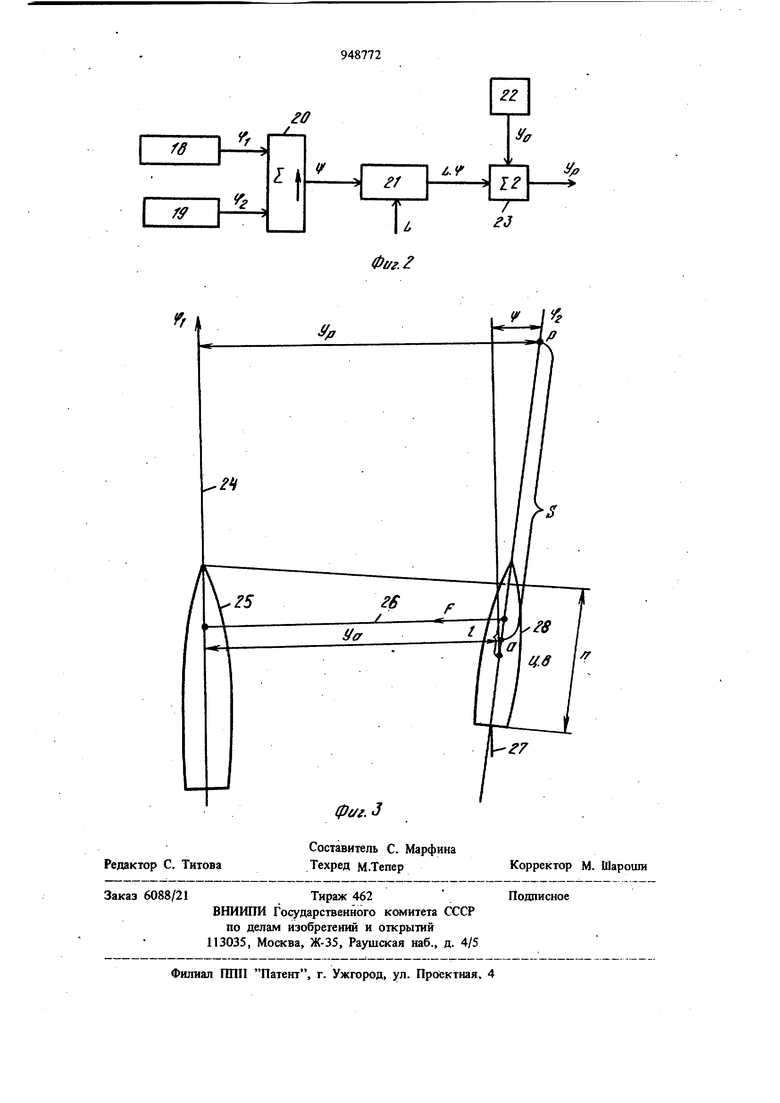
Устройство определения силы гидродинамического взаимодействия между принимающим и передающим судами вьшолнено из последовательно соединенных сумматора,,-к входам которого подключены датчики гидростатического давления, и блока умножения, к входам которого подключены выходы блоков опреде3948ления длины участка корпуса судна, определения косинуса разности курсовых углов и определения осадки судна, а выход является выходом устройства. На фиг. 1 изображена блок-схема системы автоматического управления судном, при шмающим груз с передающего суДна нри траверзной грузопередаче; на фиг. 2 - блок-схема устройства определения поперечного смещения цент ра управления судна; на фиг. 3 - схема совместного движения судов при траверзной грузопередаче. Система содержит устройство 1 определения разворачивающего момента судна от усилия канатной дороги, устройство 2 определения силы гидродинамического взаимодействия между судами, устройство 3 определения поперечного смещения центра управления судна от заданной траектории, датчики 4 и 5 углов поворота рулей направления передающего и принимающего судов, подключенные своими выходами к входам сумматора 6, выход которого соединен с входом блока 7 управления, подключенного выходом к входу исполнительного механизма 8 Устройство 1 определения разворачивающего момента судна от усилия канатной дороги состоит из датчика 9 усилия канатной дороги, подключенного электрически к блоку 10 умножения с переменной уставкой 1 на втором входе, пропорциональной расстоянию от места крепления канатной дороги на принимающем судне до. центра его вращения. Выход блока 10 умножения является выходом устройства. Устройство 2 определения силы гидродинамического взаимодействия между судами соетоит из датчиков 11 и 12 гидростатического давления, установленных по каждому борту принимающего груз судна, причем датчик 12 устйовлен на расстоянии не менее двух метров -от борта, обращенного в сторону передающего судна, с целью исключения влияния погра ничного слоя воды, обтекающего корпус судна, на замер гидростатического давления в межкор пусном пространстве. Выходы датчиков 11 и 12 подключень к входам сз мматора 13, выход которого подключен к входу блока 14 умножения, к другим входам которого подключены выходами блоки 15-17 определения длины учас тка корпуса судна, имеющего гидродинамическое взаимодействие с корпусом Передающего судна, определения косинуса разности курсовых углов передающего и принимающего судов, определение значения осадки принимающего судна. Выход блока 14 умножения является выходом устройства. Устройство 3 определения поперечного смещения центра управления судна от заданной траектории (см. фиг. 2) содержит датчики 18 и курсовых углов соответственно передающего И принимающего судов, подключенных выходами к первому сумматору 20 , выход которого подключен к входу блока 21 умножения, с переменной уставкой L на втором входе, пропорциональной-расстоянию S от места установки блока 22 измерения текущего значения , поперечного смещения судна от заданной траектории до центра управления - условной точки, вынесенной на некоторое расстояние, пропорциональное постоянной времени судна, вперед по курсу судна от точки установки блока текущего значения поперечного смещения судна от заданной траектории. Выход блока умножения подключен к одному из входов второго сумматора 23, к второму входу которого подключен выходом блок 22 текущего значения поперечного смещения судна от заданной траектории. Выход сумматора 23 является выходом устройства. Система работает следующим образом. Работа поясняется упрощенной схемой совместного движения судов при траверзной грузопередаче (фиг. 3) , где поз. 24, 25 - соответственно передающее и принимающее суда, поз. 26 - траектория, задаваемая разгружаемым судном, поз. 27 - руль направления . принимающего судна, поз. 28 - канатная дорога. Устройство 3 определения поперечного смещения центра управления принимающего судна от заданной траектории выдает со своего выхода электрический сигнал, пропорциональный по своему значению поперечному смещению Vp центра управления Р от траектории 24, задаваемой судном 25. Этот сигнал поступает на первый вход сумматора 6, на второй вход которого подается электрический сигнал с выхода устройства 1, пропорциональный по своему значению разворачивающему моменту судна от усилия канатной дороги 26. На третий вход сумматора 6 подается с выхода устройства 2 электрический сигнал, пропорциональный силе гидродинамического взаимодействия между судами. На четвертый и пятый входы подаются электрические сигналы с датчиков 4 и 5, пропорциональные углам поворота рулей направления соответственно передающего и принимающего судов. Сумматор 6 формирует электрический сигнал, пропорциональный алгебраической сумме указанных сетналов, который подается на вход блока 7, где усиливается по напряжению и по мощности и отрабатывается исполниельиым механизмом 8, который и обеспешшает перекладку руля 27 направле1шя судна 28 в соответствии с сигналом управления. Устройство определения поперечного смещения центра управления принимающего судна от заданной траектории работает следующим образом. 5 С выходов датчиком 18 и 19 снимаются электрические сигналы U , и Uz пропорцио нальные соответственно курсовым углам 7 Ч/2 передающего и при1шмающего судов и, К, 4 , и, Kjipi , где К1, К - коэффициенты пропорциональности. Эти сигналы подаются на вход сумматора 20, где они алгебраически суммируются и результат в виде электрического сигнала УЗ Кз Ч , где Кз коэффициент пропорцио нальности, Ф - разность курсовых углов передающего и принимающего судов, подается на вход блока 21 умножения, на второй вход которого подается сигнал U4, формируемый переменной уставкой L, где К4 - коэффициент пропорциональности, L - удтавка, пропорциональная расстоянию S от центра управления судна Р до места а установки блока 22 измерения текущего значения поперечного смещения судна от заданной траектории (для упрощения блок 22 установлен в центре тяжести судна). С выхода блока умн жения снимается сигнал Us Кз К4Ч L, то но соответствующий этой зависимости при достаточно малых углах Ц . Этот сигнал, определяющий собой прогнозируемое приращение поперечного смещения судна на отрезок време ни, пропорциональный постоянной времени суд на, подается на вход сумматора 23, на второй вход которого подается электрический сигнал снимаемый с выхода блока 22 текущего значения поперечного смещения судна от заданной траектории. и где KS - коэффициент пропорциональности; текущее значение поперечного смещения судна от заданной траектории. С выхода сумматора 23 снимается электрический сигнал и, KeVp пропорциональный поперечному смещению цент ра управления Р принимающего судна от траектории, задаваемой передающим судном, который является выходным сигналом устройства 3. Устройство 1 определения разворачивающег момента судна от усилия канатной дороги раб тает следующим образом. Датчиком 9 силы натяжения формируется электрический сигнал, пропорциональный силе натяжения в канйтной дороге Ug К, F, где KT - коэффициент пропорциональности; F - значение силы натяжения в канатно дороге. Этот сигнал подается на первый вход блока 10 умножения, на втором нходе которого формируется сигнал, пропорциональный рассто j яник 1 v i:i ьргплсчия канатной дороги на принимающем судне до его центра вращения 1/9 Kgl, где Kg коэффициент пропорщюнальности. С выхода блока умножения 10 снимается электрический сигнал Uio К, Kg F 1 К, М, где К9 - коэффициент пропорциональности; М - разворачивающий момент судна от усилия канатной дороги. Этот сигнал является выходным сигналом устройства 3. Устройство 2 определения силы гидродинамического взаимодействия между судами работает следующим образом. Датчиками 11 и 12 формируются электрические сигналы, пропорциональные гидростатическим давлениям воды по каждому борту принимающего судна Uir К,оР . и,г KnPz, где К loi KII - коэффициенты пропорциональ - гидростатические давления по каждому борту принимающего судна. Эти сигналы поступают на вход сумматора 13, с выхода которого выдается на. вход блока 14 умножения сигнал U К, vPxf-Pj), где коэффициент пропорциональности. На второй, третий и четвертые входы блока 14 умножения подаются сигналы соответственно ; блоков 15, 16 и 17 определения длины п участка корпуса принимаюи его судна, имеющего гидродинамическое взаимодействие с корпусом передающего судна, определения косинуса разности курсовых углов передающего и приф1мающего судов cos Ц , определения среднего значения осадки принимающего судна Н.р U44 К.г п. и,5 4 , где ,- коэффициенты пропорциональности. С выхода блока 14 умножения выдается электрический сигнал 7 -,), где К., - коэффициент пропорциональности. Этот сигнал является выходным сигналом устройства 2. Сигналы с устройств 1, 2 3 и датчиком 4 и 5 сумматором 6 и блоком 7 управления формируются в управляющий сигнал, который поступает на исполнительный механизм 8, и происходит перекладка руля направления принимающего груз судна. Описываемая система- автоматического управления судном обладает высокой точностью удержания принимающего груз судна на заданном поперечном смещении относительно траектории, задаваемой передающим судаом, повыша- . ет производительность траверзной передачи грузов и обеспечивает безопасное совместное плавание судов при тракйп-чной грузоперсдаче. Ф op мула изобретения 1.Система автоматического управления суд ном принимающим груз с передающего судна при ;траверзной грузопередаче, содержащая последовательно соединенные сумматор, блок управления и исполнительный механизм, отличающаяся тем, что, с целью повы шения точности удержания судна на заданном расстоянии относительно траектории, задаваемой передающим судном, она снабжена устройством определения поперечного смещения центра управления судна от заданной траектории, устройством определения разворачивающего момента судна от усилия канатной дороги, устройством определения силы гидродинамического взаимодействия между принимающим и передаю щим судами и датчиками углов поворота рулей направления этих судов, причем выходы устройств и датчиков подключены к входам сумматора. 2.Система по п. 1,о тличающаяс тем, что устройство определения поперечного смещения центра управления судна от заданной траектории выполнено из последовательно соеди ненных первого сумматора, блока умножения я второго сумматора, выход которого является выходом устройства, к входам первого суммато ра подключены датчики курсовых углов судов. к второму входу блока умножения - выход блока переменной уставки, а к второму входу второго сумматора - блок определения поперечного смещения. 3.Система по п. ,отличающая с я тем, что устройство определения развора чивающего момента судна от усилия канатноК дороги выполнено из блока умножения, входы которого соединены соответственно с выходами блока переменной уставки к датчика усилия канатной дороги, а выход является выходом устройства. 4.Система по п. 1, отличающаяс я тем, что устройство определения силы гидродинамического взаимодействия между принимающим и передающим судами выполнено из последовательно соединенных сумматора, к входам которого подключены датчики гидростатического давления, и блока умножения, к входам которого подключены выходы блоков определения длины участка корпуса, судна, определения косинуса разности курсовых углов и определения осадки судна, а выход является выходом устройства. . Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР W 682879, кл. G 05 D 1/00, 1951 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления траекторией движения судна | 1982 |
|
SU1062129A1 |
| Способ управления траекторией движения судна | 1980 |
|
SU908656A1 |
| Система управления двухканатной грузовой дорогой между судами в море на ходу | 1974 |
|
SU600025A1 |
| Автоматическая система управления рулемСудНА | 1979 |
|
SU839859A1 |
| Способ управления траекторией движения судна | 1978 |
|
SU724389A1 |
| СПОСОБ И СИСТЕМА ТРАВЕРЗНОЙ ПЕРЕДАЧИ СУХИХ И ЖИДКИХ ГРУЗОВ МЕЖДУ СУДАМИ НА ХОДУ | 2015 |
|
RU2584047C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ВЗАИМНОГО ПОЛОЖЕНИЯ СУДОВ ПРИ ГРУЗОПЕРЕДАЧЕ ТРАВЕРЗНЫМ СПОСОБОМ | 1971 |
|
SU428978A1 |
| СПОСОБ КООРДИНИРОВАННОГО МАНЕВРИРОВАНИЯ СУДНА | 2010 |
|
RU2429161C1 |
| Система автоматического управления передачей сухих грузов между судами на ходу | 1974 |
|
SU616187A1 |
| Устройство для передачи грузов между судами на ходу | 1972 |
|
SU455038A1 |
/
