Изобретеии,е относится- к обработке ме- талл(Л5 давлением и .может быть использовано для автоматизации листои1тамно- вочн(Л о ироизводства.
Цель изобретения noBfjinieiine надежности и ироизводите.тьности tiponecca обработки нлоски.х заготовок.
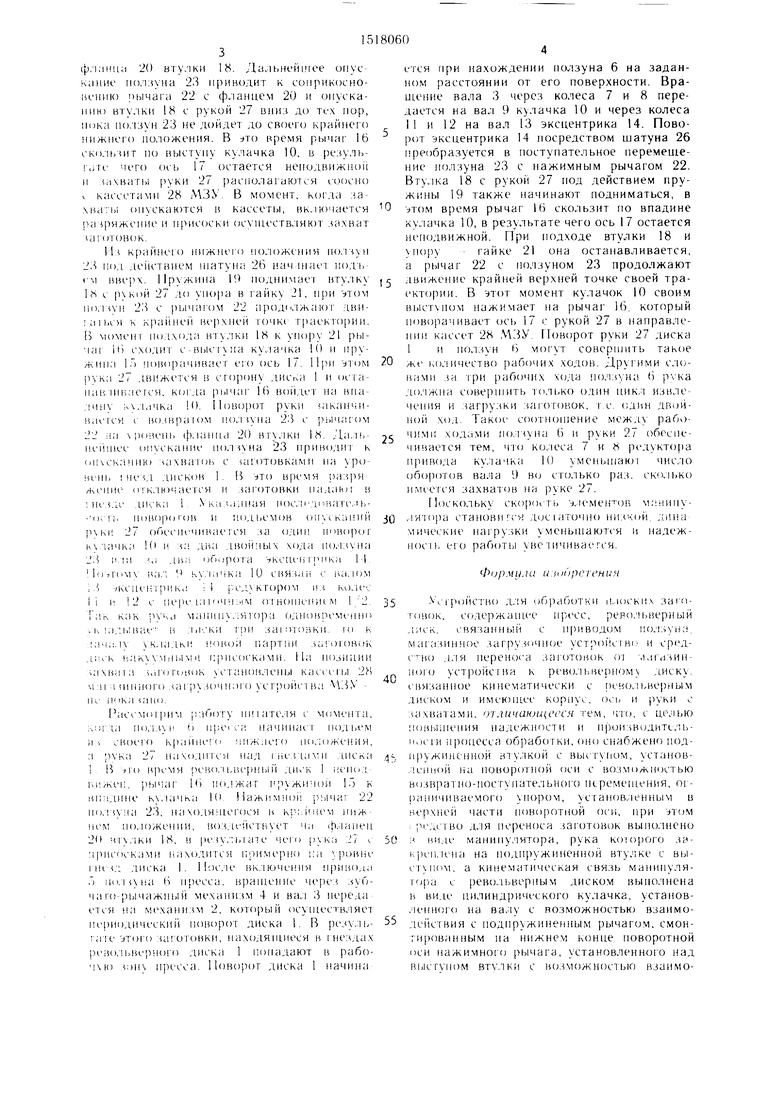
На фиг. 1 изображена констр ктивная с.хема устройства; на фиг. 2 вид А на фиг. I на фиг. 341иклограмма перемен1ения
его элементов.
Устройство для обработки п.юских заготовок состоит из рев(.)львериого диска 1, которь й через ме.ханиз.м дискретного вращения 2, вал 3 и зубчато-рычажный механизм 4 связан с приводом 5 ползуна 6 пресса. Па валу 3 крепится зубчатое ко.тесо 7, входящее в зацепление с колесом 8, приводного вала 9 цилиндрического кулачка 10. Колеса 7 и 8 образуют редуктор привода
кулачка U) лепо Kd U co 1 с колесом 12.
t i. i на.: : к , ;ач1 а ci aimn I . находипкч-. ., и t;;ueii. ii и ми сидяш.им на iia.; :3 мрпь; .ы
::)ксиен 1 рика 14. Колеса II и 1L i/r);;,i ;. .) редук|(1 на.ла (Ксаен г| ика 14 К к.1,1 ;к , 1(1 ноджа н) 15 ры -.а 16 нонс р ii- ной оси 17. Па Bc;).iieN конщ ек я 1 ci.i пов, 1ена с во nio/Kiioc i ы-о во iBpa:-о-посг. на гельно|о HC)e ieiueHHi например, но н; ;и нам, I s с Г1()жи1 .о11. 19 18 имеет выступ в виде ф.ганпа 20. Верни: кальное перемешепие втл лки 18 ограни-кн.- yric.ipoM в виде гайки 21 Над ф. :а:иием 2 втулки 18 |1аспо.тожен нажимной 22 no.r-ivna 23, перемешаюпктося li напра1,1ян) тих 24 станины 25. Ползун 23 iipin помощи liiaiyfia 2Г) связана с кспен гриком 14 Ba,;i 13 К втулке 18 крепится рука 27 с ..a. тами, например, тремя заканчивает. i с вчз- вратом пг). 23 с рычагом 22 на чроцснг
СП
Шк-я
00
о о:
о
ф/иипк 20 втулки . Дальнейшее опус к;|ние Г|{) 23 приводит к соприкосио- lieiinK) рычага 22 с фланцем 20 и опусканию вту,;1ки 18 с рукой 27 вниз до тех иор, 1П)ка по/кзуп 23 пе дойдет до CBoei CJ крайнег о нижнего положепия. В () время ptjiqar 16 СК0.1ЫИТ по выступу кулачка 10, в резуль- r.iTe чего ось 17 остается неподвижно и захваты 1уки 27 раснол агакп сн еоосно V кассетами 28 . В момент. ко1-да за- хиагы опускаются в кассеП), включается 1)азряжение и и()исоски осушеств.тяют захват
Uli ()TOB(JK.
Из к)айнего нижнего по;1ожения н(х 1зун 23 под де11ствием патупа 26 иач niaei нодт,- гм вверх. Пружина 19 поднимаег втулку 1 (S I. |пкой 27 до упора в raitKy 21, при SITOM ползун 23 с piji4aroM 22 прододжают дви- а11,ся к Kpaihieii верхней точк( траектории. В момепг подхода втулки 18 к ynofiy 21 рыча it) сходит с-выстуна кулачка 10 и нру- жппа 1 Г) новорачива.ет его ось 17. При :Л ом 27 движется в сд орону дисгчИ I п оста- иав inr,.:ieгея, когда |1ычаг 16 011дет на впадину к,1.1чка 10. Поворот руки «акапчию.пзуна 23 ()лаппа 20 вгулки
::ч1соскс1 1и. Па
1ппателя с ;; начипас iиЖJleгo III
I ровень ()лаппа вгулки 18. Ла.1ь- . опускание но. гп ма 23 приводит к НИК) захватов с 1агот(.)вкамп па уро- Ч1. зд дисков 1. В :1то в|)емя ра: ,ря- о к. 1Ю1.:аегся и .(аготовки падаю в . Указанная нос/К Д nsa i e. i ьHDliOpOi OB п ИОДЬеУЮВ OU 4KLiHHit
ооеснгчпваегся за один новорси (| и за др.а хода нолзугк 3ii д| ,и оГюрога : кс11еи грика 1
на., . ку. 1ачка 10 связа: с ка.ю.м UMyKTcjpOM i.i K.v)..ie .:
IH:.iM OTHOHlCHMt M 1 2.
H v. :Hi op.a ft UiOBneMeiiHo Т)и 3ai :)то:зки. lo к iioBoii iia)Tiii( 3arv)i()BOK
пози;1ии устаповлоп.. кгкччты зочпого cr;)oiic-i ва 13У момента, г подьем 1, ;оже1 11я,
кс1ич;i рика i i I . 12 I. i:e|U 1 Та,к как .1 м; . к адывае- и .о :ача. к. la.iKi; i , iia,K умн 1.1 11 ;а ва I а uirij п. Нок VI а uiHiioro .ia Г Hv- iioKa laiio.
I accMoi рпм раооту : .,i la пол.( I t) H|.)ei i I 1 cBotM o K|)aiiHi о a pvKa 27 находится над иезчамн диска i (5 -яч) время K4io. i 1Л ,е)ный диск 1 iiiMio. : ы .жен. рычаг Mi иолжат иружичсч 13 к кулачка 10 Пажимно рчлчаг 22 1П),1зуиа 2. 5, иа одя:це1 ося ii KiK.ifium пиж- пем юложепии, во.зде йствует ча фланец 2П г|у.1ки 18, в |:1езу, :ы ате чего )ка 27 с чрисосками находится |;; )имерно i:a poBiie 1Не(д диска 1. После вк.лючепия п|1ивола .) 11ч. 6 пресса, враигение через зуо- ча го-рычажный механизм 4 и вал 3 ие|)еда ется на механизм 2, который осугнеетвлнет ие)подпч1, ский поворот диска 1. В резу.. 1ь- ате этого за отовкп, паходяп1иеся в гнездах ренол 1ли 11но1Ч) диска 1 попадают в рабо- ) зону пресса. Поворог диска 1 начпна
0
5
O
5
0
5
ется нри нахождении нолзуна 6 на заданном расстоянии от его поверхности. Вра- uieHHe вала 3 через колеса 7 и 8 передается на вал 9 кулачка 10 и через колеса 11 и 12 на вал 13 эксцентрика 14, Поворот эксцентрика 14 носредством шатуна 26 1 реобразуется в поступательное перемещение ползуна 23 с нажимным рычагом 22, Вту, 18 с рукой 27 под действием пружины 19 также начинают подниматься, в этом время рычаг 16 скользит по впадине ку,. 1ачка И), в результате чего ось 17 остается неподвижной. При подходе втулки 18 и упоругайке 21 она останавливается,
а рычаг 22 с ползуном 23 продолжают ;1виже11ие крайней верхней точке своей траектории. В этот момент кулачок 10 своим выстчном нажимает на рычаг Их который поворачивает ось 17 с рукой 27 в направлении кассет 28 МЗУ. Поворот руки 27 диска 1 и нолзун 6 могут соверн1ить такое 1чО:1ичество рабочих ходов. Другими сло- ами .ta три )абочих Х(;да ползуна 6 должна соверн1ить только o, uiH lutK.i извлечения и .загрузки заготовок, тс. один двойной ход. Такое соотноп1ение между рабочими ходами ползуна () и руки 27 обеспечивается тем, что Ko,ieca 7 и 8 редуктора п 1пвода кула ка 10 умепынакп число обо|)отов вала 9 столько раз, ск хлько пмеегся захватов на руке 27.
Поскольку ско)ость э.лемен ов м.тнину- лятора CTaHOBnrcv; .дос1аточно низкой, дина мические па1рузки умепьп1аются и надежное и, eio работы уветичиваегся.
Фирму.HI и:1(и регения
У1Д 1о11ство д, 1Я обработки и..1оских заготовок, содержанич пресс, револьверный даек. связанный с нриводом ползуна маг азинное )узочное устройство и сред- ) Д.ЛЯ иереноса за1Ч)товок o l иагазин- ного устройства к рево;|ьверном диску, связашюе кинематически с Г)евольверным диском и имеющее корпус, ось и П ки с захватами, гплиник)и(есся тем, чтч), с целью :1он1ДП1ения надежности и П|)оизв(дител1 - носги процесса обработки, оно снабжено подпружиненной вту.пкой с выстугюм, устапов- л.енной на поворотной оси с возможностью возврат по-посту пательно1 о перемещения, ог- 1 аппчпвае.мого чнором, устаповленным в BepxHeii части 1И)во)отпой oiai, при этом Р| ЧСГВО д.тя иереноса заготовок выиолнено ; виде манипулятора, рука которого зэ- 1 р1- н,тепа на подпружиненной втулке с выступом, а кинематическая связь манипуля- го)а с рево,.1ьверным диском выполнена в виде цилиндрического ку. 1ачка, установленного на валу с возможностью взаимо- де11ствия с юдцружиненным рычагом, смон- ;и)ованным на нижнем конце поворотной оси нажимно(.| рычага, установленного над выстуном вту.тки с 1и)змож11остддо взаимодействия с последним и связанного при помощи шатуна с эксцентриком, закрепленным на валу, при этом вал кулачка через редуктор связан с приводом револь верного диска, а вал эксцентрика через
редуктор связан с валом кулачка, причем передаточное отношение редуктора вала лачка равно числу захватов руки, а передаточное отношение редуктора вала эксцентрика равно 1/2.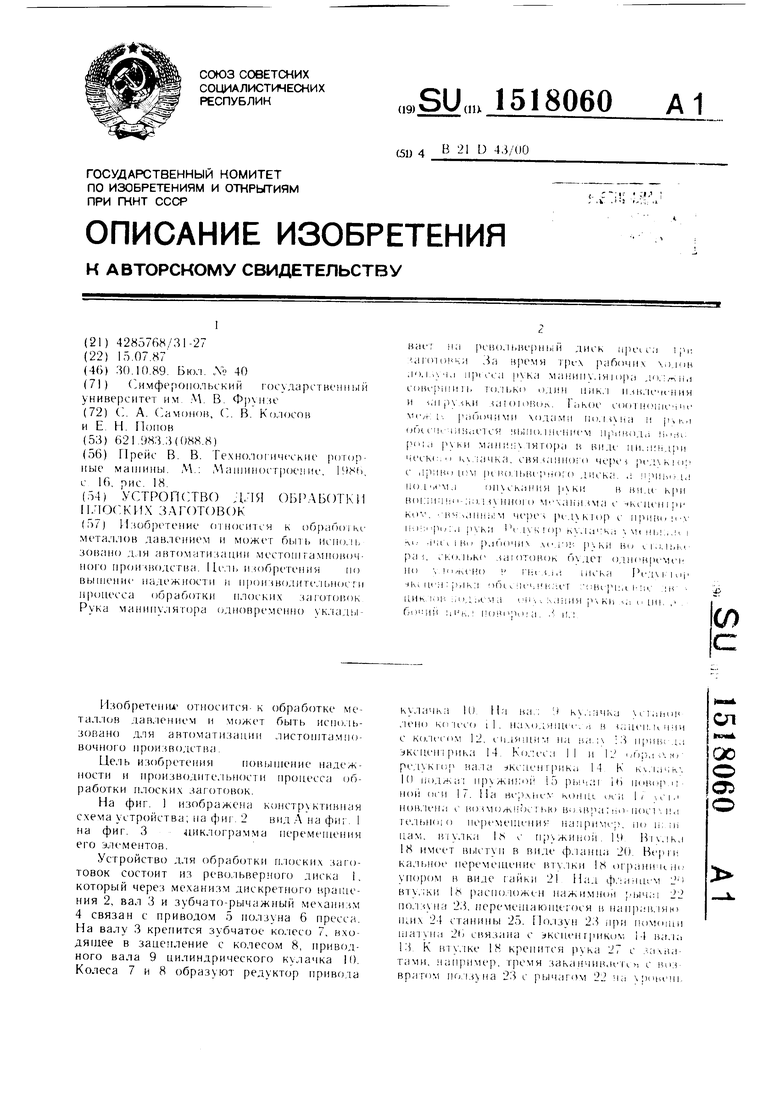
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕСС С РЕВОЛЬВЕРНОЙ ГОЛОВКОЙ | 1970 |
|
SU273628A1 |
| Штамп-автомат для выдавливания полых деталей типа втулок | 1986 |
|
SU1409400A1 |
| Устройство для смены инструмента | 1986 |
|
SU1414549A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Устройство для реставрации изношенных валов | 1979 |
|
SU897457A1 |
| Устройство для механической обработки деталей преимущественно пустотелых | 1983 |
|
SU1356953A3 |
| Вакуумный манипулятор | 1990 |
|
SU1754442A1 |
| Штамп-автомат для выдавливания пустотелых деталей | 1975 |
|
SU557846A1 |
| Штамп-автомат для выдавливания полых деталей | 1985 |
|
SU1268274A1 |
| Захватный орган устройства для подачи заготовок в рабочую зону | 1978 |
|
SU740359A1 |
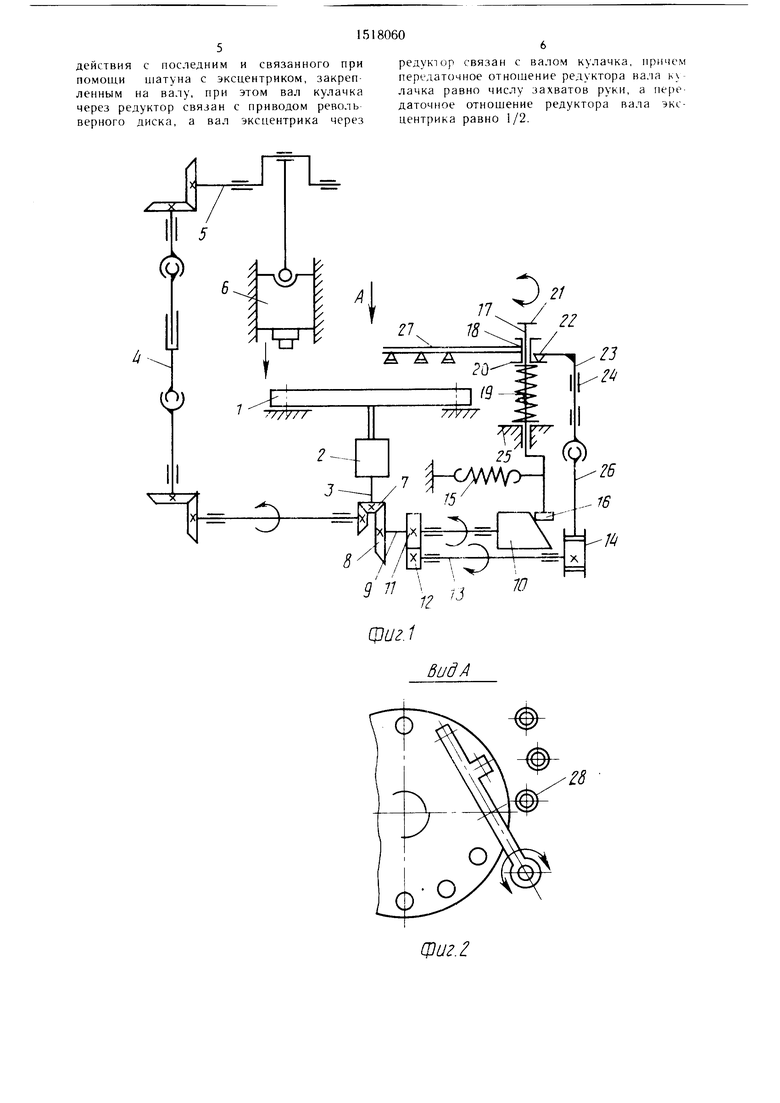
Изобретение относится к обработке металлов давлением и может быть использовано для автоматизации местоштамповочного производства. Цель изобретения - повышение надежности и производительности процесса обработки плоских заготовок. Рука манипулятора одновременно укладывает на револьверный диск пресса три заготовки. За время трех рабочих ходов ползуна пресса рука манипулятора должна совершить только один цикл извлечения и загрузки заготовок. Такое соотношение между рабочими ходами ползуна и руки обеспечивается выполнением привода поворота руки манипулятора в виде цилиндрического кулачка, связанного через редуктор с приводом револьверного диска, а привода подъема-опускания руки-в виде кривошипно-ползунного механизма с эксцентриком, связанным через редуктор с приводом поворота руки. Редуктор кулачка уменьшает количество рабочих ходов руки во столько раз, сколько заготовок будет одновременно уложено в гнезда диска. Редуктор эксцентрика обеспечивает совершение двух циклов подъема - опускания руки за один рабочий цикл поворота. 3 ил.
6-.
/I
4
(
г
77
I
О.
27
18
&
0
-|-| (9 //у//
Я
21
22
Г
ЛЗ
г
7-1
( I
Г
(о)
Р
) 1
в 77 ;.
12
Ю
-26 16
-/
ВидА
фиг. 2
од ползуна , прессаi
Po5oi uu ход J
Поборот диска 1
271
Угол поворота привода
5п
Угол подорото Sana
6п
Фиг.З
| Прейс В | |||
| В | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Л.: .UiiniinocT|)oe ие, 198h, с 16, рис | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
