(21)4398948/25-28
(22)29.03.88
(46)30.10.89. Биш. № 40
(72)Б.А.Мельников и В.А.Воробьев
(33)621-12 (088.8)
(56)Авторское свидетельство СССР № 1342146, кл. F 16 Н 27/02, 1985.
(54) УСТРОЙСТВО ШАГОВОГО ПЕРЕМЕЩЕНИЯ
(57)Изобретение относится к машиностроению и может быть использовано
для шагового перемещения объектов в устройствах, работающих в автоматическом или ручном режиме. Цель изобретения - повышение надежности путем улучшения фиксирования штанги при ее шаговых перемеш,ениях. После шагового перемещения штанги 4 силой F или F она фиксируется от обратного перемещения путем воздействия на рычаг 13 силой F, что обеспечивает поворот и заклинивание штанги 4 сухарем 7. 4 ил.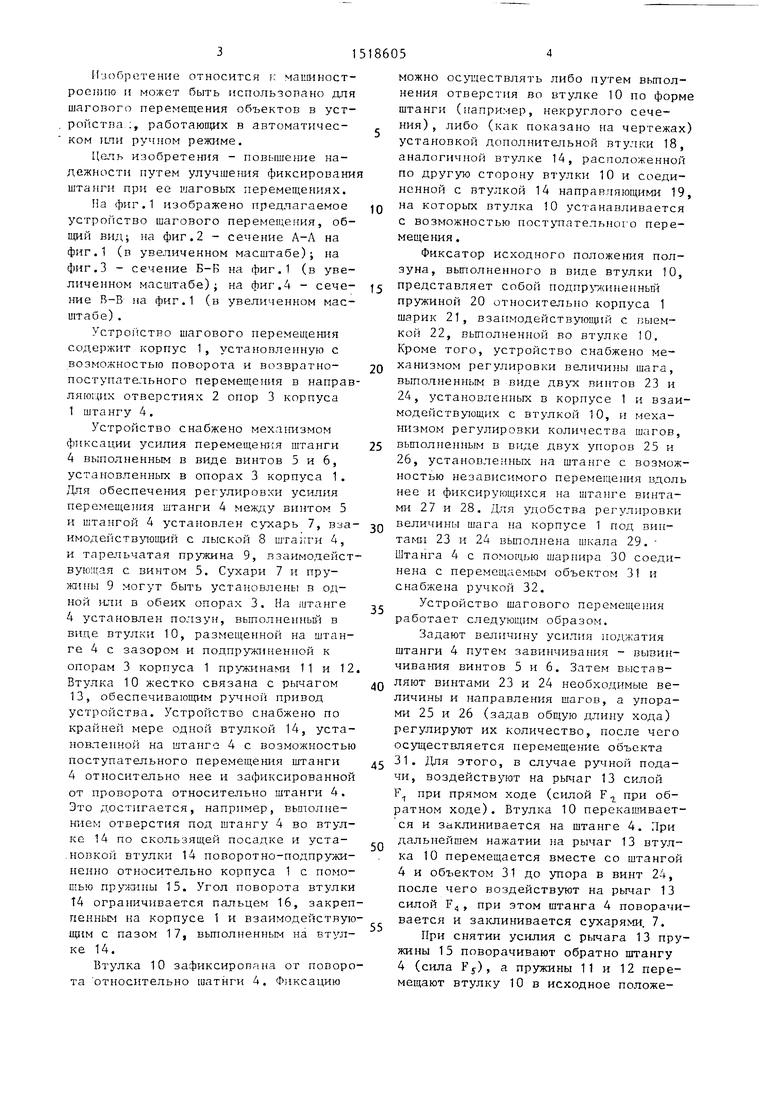
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АКТИВНОГО КОНТРОЛЯ ДОВОДОЧНОГО СТАНКА | 1991 |
|
RU2036070C1 |
| Шагозадающее устройство к пружинонавивочному автомату | 1974 |
|
SU528990A1 |
| Устройство для подачи длинномерного материала в зону обработки | 1990 |
|
SU1731372A1 |
| Шагозадающее устройство к пружинонавивочному автомату | 1985 |
|
SU1301538A1 |
| Автомат для навивки пружин | 1975 |
|
SU599896A1 |
| Полуавтоматический станок для продораживания коллекторов электрических машин | 1977 |
|
SU691969A1 |
| Устройство для отделения листовых заготовок от стопы | 1990 |
|
SU1761359A1 |
| Шагозадающее устройство к пружинонавивочному автомату | 1976 |
|
SU578145A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ НИТИ | 1996 |
|
RU2129088C1 |
| Устройство для бестраншейной прокладки трубопроводов | 1982 |
|
SU1082910A1 |
Изобретение относится к машиностроению и может быть использовано для шагового перемещения объектов в устройствах, работающих в автоматическом или ручном режиме. Цель изобретения - повышение надежности путем улучшения фиксирования штанги при ее шаговых перемещениях. После шагового перемещения штанги 4 силой F1 или F2 она фиксируется от обратного перемещения путем воздействия на рычаг 13 силой F4, что обеспечивает поворот и заклинивание штанги 4 сухарем 7. 4 ил.
11п г/ on 75 7 5гв
( f / / Zi
/ VxxJpi/ xxxx/i x i о
31
ш (Л
СП
00 а о ел
Изобретение относится i: маигинсст- роеиию и может быть использопано для шагового перемещения объектов в устройства :, работаюпц х в автоматичес- ком 1ШИ ручном режиме.
Цель изобретеш я - повышение надежности путем улучшения фиксировани штанги при ее шаговых перемещениях.
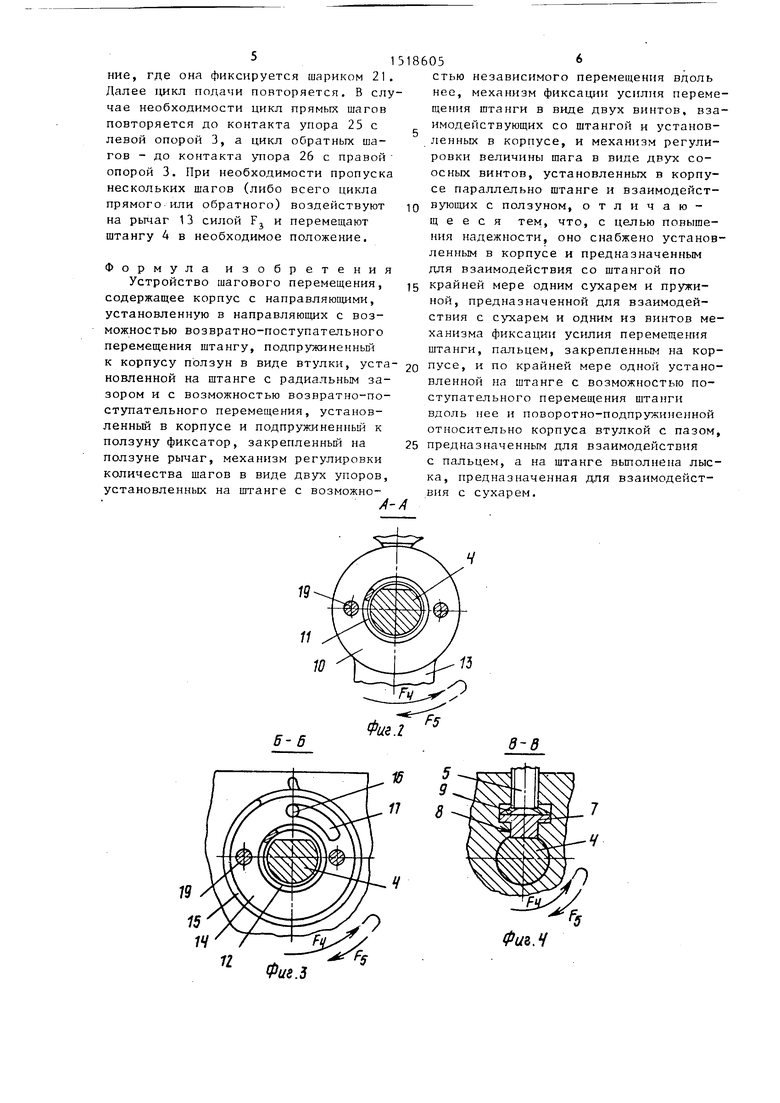
Па фиг.1 изображено предлагаемое устройство шагового перемещения, общий вид; на фиг.2 - сечение А-А на фиг.1 (в увеличенном масштабе); на фиг.З - сечение Б-Б на фиг.1 (в увеличенном масштабе); на фиг.4 - сече- ние В-В на фиг.1 (в увеличенном масштабе) .
Устройство шагового перемещения содержит корпус 1, установленную с возможностью поворота и возвратно- поступательного перемещения в направ отверстиях 2 опор 3 корпуса 1 штангу 4.
Устройство снабжено мехатгазмом фиксадии усилия перемещения штанги 4 выполненным в виде винтов 5 и 6, установленных в опорах 3 корпуса 1. Для обеспечения регулировки усилия перемещения штанги 4 между винтом 5 и штангой 4 установлен сухарь 7, вза имодействующий с лыской 8 шта;;ги 4, и тарельчатая пружина 9, взаимодействующая с винтом 5. Сухари 7 и пружины 9 могут быть установлены в одной 1-ши в обеих опорах 3. На штанге 4 установлен ползун, выполненный в виде втулки 10, размещенной на штанге 4 с зазором и подпружиненной к опорам 3 корпуса 1 пружинами 11 и 12 Втулка 10 жестко связана с рычагом 13, обеспечиваюпгим ручной привод устройства. Устройство снабжено по крайней мере одной втулкой 14, установленной на штанго 4 с возможностью поступательного перемещеш1я штанги 4 относительно нее и зафиксированной от проворота относительно штанги 4. Это достигается, например, вьтолне- нием отверстия под штангу 4 во втулке 14 по скользящей посадке и уста- -новкой втулки 14 поворотно-подпружи- ненно относительно корпуса 1 с помощью прулшны 15. Угол поворота втулки Т4 ограничивается пальдем 16, закреп- пенным на корпусе 1 и взаимодействующим с пазом 17, выполненным на втулке 14.
Втулка 10 зафиксирована от поворота относительно шатнги 4. Фиксацию
0
5 0 5 0 5
0
5
можно осутаестБлять либо путем выполнения отверстия во втулке 10 по форме штанги (например, некруглого сечения) , либо (как показано на чертежах) установкой дополнительной втулки 18, аналогичной втулке 14, расположенной по другую сторону втулки 10 и соединенной с втулкой 14 направляющими 19, на которых втулка 10 устанавливается с возможностью поступательног о перемещения .
Фиксатор исходного положения ползуна, выполненного в виде втулки 10, представляет собой подпр -жиненньм пружиной 20 относительно корпуса 1 шарик 21, взаимодействующий с иыем- кой 22, вьтолненной во втулке 10. Кроме того, устройство снабжено механизмом регулировки величины шага, выполненным в виде винтов 23 и 24, установленных в корпусе 1 и взаимодействующих с втулкой 10, и меха- Ш13МОМ регулировки количества шагов, вьтолненным в виде двух упоров 25 и 26, установле 1ных на штанге с возможностью независимого перемещения вдоль нее и фиксирующихся на щтанге винтами 27 и 28. Для удобства регулировки величины шага на корпусе 1 под винтами 23 и 24 вьтолнена шкала 29. Штанга 4 с помощью шарнира 30 соединена с перемеи1аемым объектом 31 и снабжена ручкой 32.
Устройство шагового перемещения работает следующим образом.
Задают величину усилия поджатия штанги 4 путем завинчивания - вывин- винтов 5 и 6. Затем выставляют винтами 23 и 24 необходимые величины и направления шагов, а упорами 25 и 26 (задав общую длину хода) регулируют их количество, после чего осуществляется перемещение объекта 31. Для этого, в случае ручной подачи, воздействуют на рычаг 13 силой F при прямом ходе (силой F при обратном ходе). Втулка 10 перекашивается и заклинивается на штанге 4. При дальнейшем нажатии на рычаг 13 втулка 10 перемещается вместе со штангой 4 и объектом 31 до упора в винт 24, после чего воздействуют на рычаг 13 силой F, при этом штанга 4 поворачивается и заюгинивается сухарями. 7.
При снятии усилия с рычага 13 пружины 15 поворачивают обратно штангу 4 (сила Ff), а пружины 11 и 12 перемещают втулку 10 в исходное положение, где она фиксируется шариком 21. Далее цикл подачи повторяется. В слу чае необходимости цикл прямых шагов повторяется до контакта упора 25 с левой опорой 3, а цикл обратньгх шагов - до контакта упора 26 с правой опорой 3. При необходимости пропуска нескольких шагов (либо всего цикла прямого или обратного) воздействуют на рычаг 13 силой Fj и перемещают штангу 4 в необходимое положение.
Формула изобретения
Устройство шагового перемещения, содержащее корпус с направляющими, установленную в направляющих с возможностью возвратно-поступательного перемещения штангу, подпружиненньпЧ к корпусу ползун в виде втулки, уста новленной на штанге с радиальным зазором и с возможностью возвратно-поступательного перемещения, установленный в корпусе и подпружиненный к ползуну фиксатор, закрепленный на ползуне рычаг, механизм регулировки количества шагов в виде двух упоров, установленных на штанге с возможно
Фиг.З
18605
стью независимого перемещения вдоль нее, механизм фиксации усилия перемещения штанги в виде двух винтов, взаимодействующих со штангой и установленных в корпусе, и механизм регулировки величины шага в виде двух со- осных винтов, установленных в корпусе параллельно штанге и взаимодейст- 10 вуюищх с ползуном, отличающееся тем, что, с целью повышения надежности, оно снабжено установленным в корпусе и предназначенным для взаимодействия со штангой по 15 крайней мере одним сухарем и пружи
ной, предназначенной для взаимодействия с сухарем и одним из винтов механизма фиксации усилия перемещения штанги, пальцем, закрепленным на корпусе, и по крайней мере одной установленной на штанге с возможностью поступательного перемещения штанги вдоль нее и поворотно-подпружи}1енной относительно корпуса втулкой с пазом,
предназначенным для взаимодействия с пальцем, а на штанге вьтолнена лыс- ка, предназначенная для взаимодействия с сухарем.
US.f
