Изобретение относится к оборудованию для навивки пружин.
Известен станок для навивки пружин с переменным шагом, содержащий шагозадающее устройство, выполненное в виде ходового винта обратного действия, несущего рычаг с винтом изменения шага и резьбовую втулку с роликовым пальцем, и связанного с ходовым винтом фрикционного диска, взаимодействующего через промежуточное звено с ходовым винтом прямого действия 1.
В таком устройстве щаг пружины определяется положением резьбовой втулки относительно оси вращения рычага. Однако из-за нестабильности положения резьбовой втулки не обеспечивается заданная точность по щагу.
Известно щагозадающее устройство к пружинонавивочному автомату, содержащее смонтированные в корпусе два щаговых упора, закрепленных на концах щтанг, соединенных между собой траверсой, рычажный механизм перемещения щаговых упоров, кине.матически связанный с траверсой и распределительным валом, и установленный на валу механизм реза 2.
Однако из-за несоверщенства средств регулировки щага пружин и отсутствия возможности регулировать величину упоров относительно оси подачи точность и стабильность параметров пружин по щагу недостаточны.
Цель изобретения - расщирение технологических возможностей устройства и повыщенис стабильности параметров пружины.
Для этого устройство снабжено зстановленными в корпусе параллельно несущим щаговые упоры щтапгам двумя дополнительными щтангами, одна из которых смонтирована с
возможностью осевого регулировочного перемещения, и толкателем с двумя сферическими наконечниками, один из которых связан с рычажным механизмом перемепхения щаговых упоров, а второй - с размещенным на валу
механизма реза двуплечим рычагом, на одном плече которого размещена планка, несущая имеющий регулировочное перемещение вдоль ее оси упор, связанный промежуточным рычагом с распределительным валом.
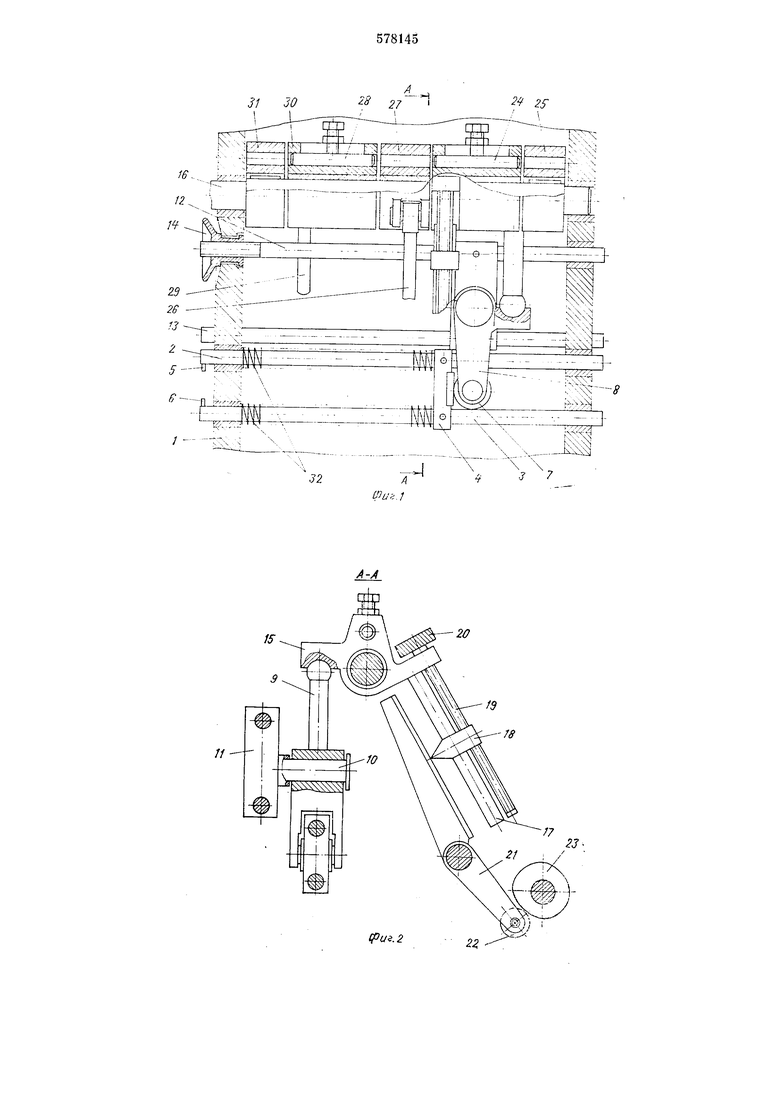
На фиг. 1 изображено предлагаемое устройство, вид сбоку с частичным продольным разрезом по валу реза и щтангам; на фиг. 2- разрез по А-А на фиг. 1.
В корплте 1 подвижно установлены щтанги
2 и 3, соединенные между собой траверсой 4, на концах каждой штанги закреплены шаговые упоры 5 и 6.
На траверсу 4 одним своим плечом с роликом 7 воздействует двуплечий рычаг 8. Вторым своим илечом двуплечий рычаг 8 через
подпятник связан со сферическим концом толкателя 9. Двуплечий рычаг 8 соединен .с осью 10 траверсы 11, жестко закрепленной на дополнительных штангах 12 и 13. Благодаря наличию толкателя 9 ось 10 может менять свое положение в кинематической цепи при работе автомата. Штанга 12 выведена на переднюю стенку автомата и имеет в этом месте резьбу и гайку 14, с помощью которой изменяется положение оси 10. Таким образом на ходу автомата регулируется рабочее положение шаговых упоров по отношению к линии подачи проволоки. Толкатель 9 имеет сферы с двух сторон и второй сферой через подпятник взаимодействует с плечом двуплечего рычага 15. Двуплечий рычаг 15 расположен на валу реза 16 и имеет в качестве второго плеча планку
17,на которую насажен дополнительный упор
18,с номошью винта 19 и рукоятки 20 перемещающийся на планке 17. Таким образом регулируется величина хода шаговых упоров. Двуплечий рычаг 15 взаимодействует упором 18 с двуплечим рычагом 21, который в свою очередь связан через ролик 22 с кулачком 23 распределительного вала.
Двуплечий рычаг 15 расположен на валу реза 16 таким образом, что при включении он своим пальнем 24 может кинематически соединять привод механизма шагообразования через рычаги 25, 26 к 27 с верхней или с нижней нолзушкой механизма реза (иа чертеже не показаны) в зависимости от того, какой рез включен (нижний или верхний).
Нижний или верхний рез включается пальцем 28 от нривода реза через рычаги 29 и 30 на рычаги 27 и 31. На ползушке, свободной от реза, устанавливается клин, при введении которого в витки пружины образуется шаг.
Устройство для образования шага навиваемых пружин работает следующим образом.
В зависимости от положения шаговых упоров 5 и 6 по отношению к линии подачи проволоки навиваемой пружины, витки пружины будут навиваться или вплотную друг к другу, или на некотором расстоянии друг от друга, т. е. будут иметь определенный шаг.
При навивке пружин сжатия с опорными крайними витками после навивки первого крайнего витка шаговые упоры выдвигаются в рабочее положение и воздействуют на витки, оставаясь в этом положении во время навивки рабочих витков, а перед концом навивки щаговые упоры отводятся в исходное нерабочее положение и последний опорный виток навивается без воздействия щагового упора. Поступательное в рабочее положение шаговым упорам 5 и 6, штангам 2 и 3 и траверсе 4 сообшается от кулачка 23 через рычаги 21, 15, толкатель 9 и рычаг 8. Возвратное движение в исходное положение шаговых упоров осуществляется пружинами 32. С помощью рукоятки 20 и винта 19 дополнительный упор 18 перемещается по планке 17. Этим достигается изменение соотношений плеч рычагов 21 и 15, взаимодействующих между собой. Эта регулировка определяет величину хода щаговых упоров между исходным и рабочим положением. С помощью гайки 14 через щтангу 12, траверсу 11, рычаг 8 и толкатель 9 перемещаются щтанги 2 и 3, что позволяет регулировать на ходу автомата рабочее положение шаговых упоров по отнощению к линии
15 подачи проволоки.
ПрИлМенение предлагаемого устройства на пружинонавивочных автоматах дает возможность получать стабильный шаг в процессе навивки пружин, улучщить условия эксплуатации автоматов и за счет упрощения конструк ции механизма шагообразования повысить на дежность устройства.
Формула изобретения
5 Шагозадающее устройство к пружинонавивочному автомату, содержащее смонтированные в корпусе два шаговых упора, закрепленных на концах штанг, соединенных между собой траверсой, рычажный механизм перемещения щаговых упоров, кинематически связанный с траверсой и распределительным валом, и установленный на валу механизм реза, отличающееся тем, что, с целью расширения технологических возможностей и повышения
5 стабильности параметров пружины, оно снабжено установленными в корпусе параллельно штангам, несущим шаговые упоры, двумя дополнительными жестко связанными между собой щтангами, одна из которых смонтирована
0 с возможностью осевого регулировочного перемещения, и толкателем с двумя сферическими наконечниками, взаимодействующим с рычажным механизмом перемещения упоров, а на валу механизма реза размещен двуплечий
5 рычаг, связанный одним плечом с толкателем и несущий на втором плече планку с упором, смонтированным с возможностью регулировочного неремещения вдоль планки и связанным рычажным звеном с распределительным
0 валом.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 276897,кл. В 21F 35/00, 1969.
2.Заявка 2051523/22-2 от 30.01.75, по которой принято решение о выдаче авторского свидетельства.
31 30
o2
-vV
3 7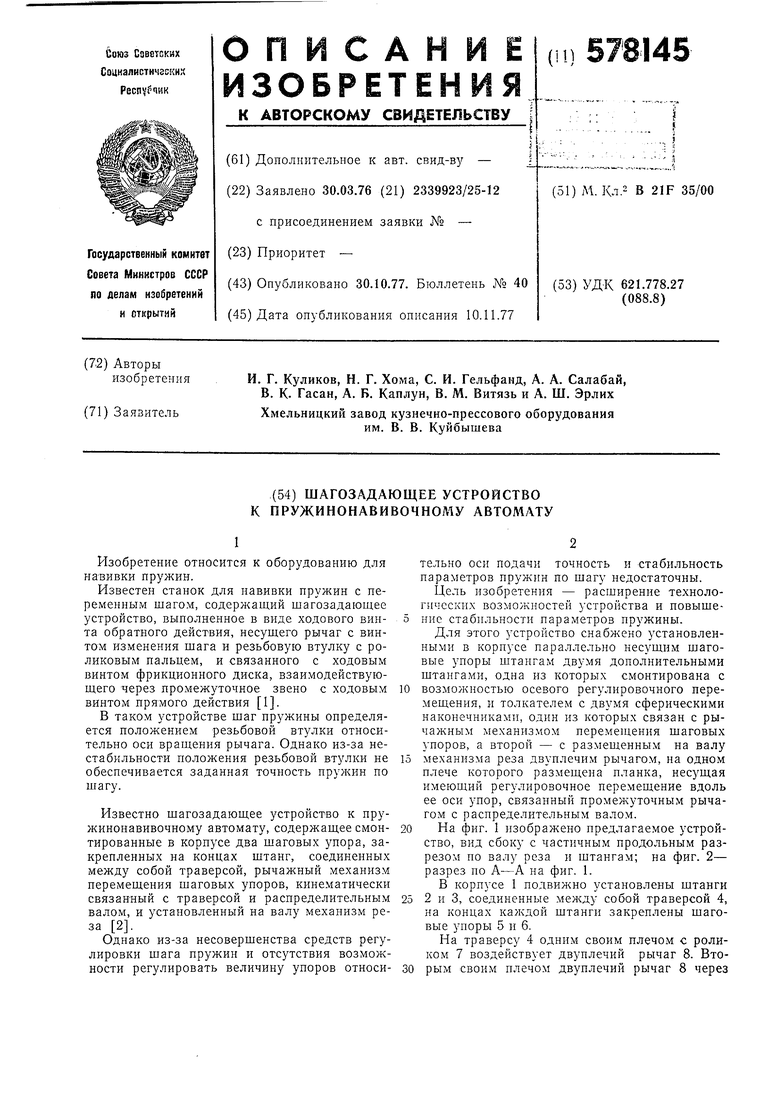
| название | год | авторы | номер документа |
|---|---|---|---|
| Шагозадающее устройство к пружинонавивочному автомату | 1974 |
|
SU528990A1 |
| Шагозадающее устройство к пружинонавивочному автомату | 1985 |
|
SU1301538A1 |
| Автомат для навивки пружин | 1980 |
|
SU895576A1 |
| Автомат для навивки пружин | 1976 |
|
SU565761A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ПРУЖИН С ДВУХСТОРОННЕЙ НАВИВКОЙ И ИЗГИБОМ В СРЕДНЕЙ ЧАСТИ | 2001 |
|
RU2197356C1 |
| Автомат для навивки пружин | 1978 |
|
SU776725A1 |
| Шагозадающее устройство к пружинно-навивочному автомату | 1983 |
|
SU1156785A1 |
| Устройство для программного управления пружинонавивочной машиной | 1975 |
|
SU554916A1 |
| Автомат для навивки пружин | 1975 |
|
SU599896A1 |
| Навивочный механизм к пружинонавивочному автомату | 1986 |
|
SU1407635A1 |