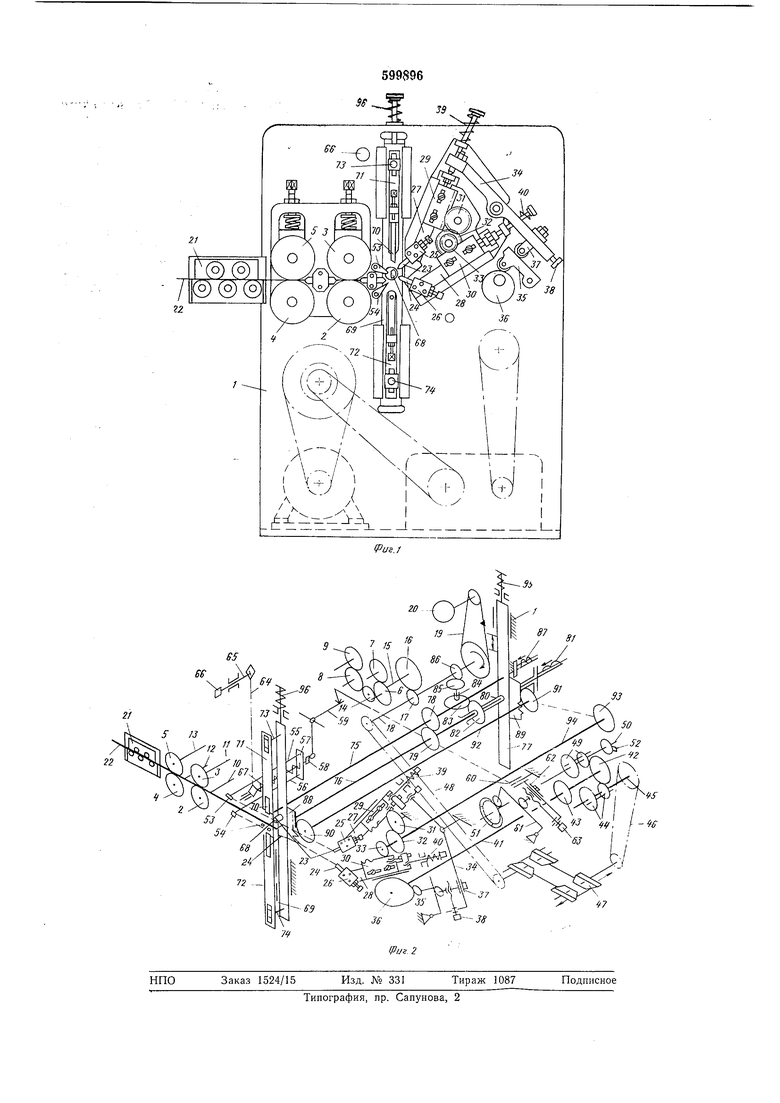
тически связанные между собой через шестерни 31-33. Ползун 27 кинематически связан рычагами 34 и 35 с копирным диском 36. На плече рычага 34 подвижно установлены каретка 37 и винт 38, служащие для регулировки соотношения плеч рычагов 34 и 35. Пружины 39 и 40 служат для силового замыкания рычажно-шестеренчатой передачи с копирным диском 36. Копирный диск 36 закреплен па конце копирного вала 41. Копириый вал 41 через шестерни 42 и 43, подвижный блок 44, установленный на валу 45, и через цепную передачу 46 связап с вариатором 47. Шестерни 42 и 43 и блок 44 вместе с вариатором служат для расширения диапазона бесступенчатого регулирования скоростей. Вариатор 47 через цепную передачу 48 кинематически связан с приводным валом 18. Копирный вал 41 кинематически связан через подвижный блок 49 и шестерни 42 или 43 с кулачковым валом 50, на котором установлены кулачки 51 шагозадаюшего механизма и лепесток 52 для управления муфтой механизма отрезки. Шаговые упоры 53 и 54 укреплены на штангах 55 и 56, соединенных между собой траверсой 57, и служат для задачи шага навиваемых пружин. В траверсу между штангами резьбовой частью ввернут шток 58, головка которого контактирует с роликом углового рычага 59. Угловой рычаг через рычаги 60 и 61 кинематически связан с кз лачками 51. Па плече рычага 60 имеется подвижная каретка 62 с регулировочным винтом 63, служашая для изменения соотношений плеч рычагов 60 и 61. Шлицевый конец штока 58 цепной нередачей 64 связан с валиком 65, на конце которого имеется рукоятка 66 для ручной регулировки положения шаговых упоров по отношению к линии подачи проволоки. Пружина 67, установленная на штоке 58, служит для силового замыкания рычажной системы с кулачками 51. Внутренний нож 68, закрепленный в подвижной плите 69, и внешний нож 70, укрепленный на подвижной ползушке 71, отрезают навитую пружину. Ползушка 72 используется для установки внешнего ножа при отрезке левозаходных пружин. Ползушки 71 и 72 одними своими концами подвижно установлены на осях 73 и 74, а другими концами установлены на эксцентриковых концах валов 75 и 76, которые в свою очередь установлены в цодвижных плитах 69 и 77 и связаны между собой шестернями 78 и 79. Вал 76 проходит внутри вала 80, и на концах этих валов установлены ведомая и ведушая часть муфты 81, включающей отрезной механизм в момент отрезки навитой пружины. Вал 80 через шестеренчатую перекрещивающуюся передачу (коническую или винтовую) шестернями 82, 83, телескопическим валом 84, шестернями 85 и 86 кинематически связан с приводным валом 18. 5 10 15 20 25 30 35 40 45 50 55 60 65 На концах вала 75 установлен тормоз-фиксатор 87, жестко соединенный с плитой 77 и служащий для остановки валов 75 и 76 в исходном ноложенни. На плитах 69 и 77 закреплены зубчатые рейки 88 и 89, находян иеся в зацеплении с шестернями 90 и 91, установленными на синхронизирующем валу 92. Шестерня 91 находится Б зацеплении с шестерней 93, установленной на валу 94, на котором укреплены и шестерни 32, 33 механизма навивки. Пружины 95 и 96 служат для силового замыкания рычажной системы между конирным диском и механизмом отрезки. Автомат для навивки пружин работает следующим образом. От двигателя 20 через клиноременную передачу 19 вращение передается приводному валу 18, от которого получают движения все механизмы автомата. При навивании пружин проволока 22 через устройство 21 для правки протягивается роликами 2-5 и подается к навивочным упорам 23 н 24, где она завивается в пружину. Вращение приводного вала 18 передается через шестерни 16 и 17 валу 15, от которого через щестерни 14 и 6-9 передается валам 10-13 и роликам 2-5. При навивке фигурных пружин упоры 23 и 24 находятся в постоянном движении, то отдаляясь от начальной точки изгиба проволоки, то приближаясь к ней. При отдалении упоров от начальной точки изгиба нроволоки диаметр навиваемой пружины увеличивается, а при сближении упоров - уменьшается. В результате кинематической связи механизма навивки с механизмом отрезки внзтренний нож 68 и внешний нож 70 также отдаляются от начальной точки изгиба проволоки или сближаются с ней. Движение зпоров и ножей происходит на пропорциональное расстояние и осуществляется от копирного диска 36, через рычаги 34 и 35 шестерни 31-33 и вал 94. Величина хода упоров и ножей устанавливается изменением соотношения плеч рычагов 34, 35 и нередвнжением каретки 37 при помощи винта 38. От вала 94 через шестернн 93 и 91 движение передается синхронизирующему валу 92, а от синхронизирующего вала, через шестерни 90, 91 и зубчатые рейки 88, 89 - плитам 69 и внещнему ножу 70. Копирный диск 36 вместе с копирным валом 41 приводится во вращение от нриводного вала через цепную передачу 48, вариатор 47, цепную передачу 46, вал 45, а затем через блок шестерен 44 и шестерни 42 и 43. Шестеренная передача в сочетании с вариатором позволяет расширнть диапазон скоростей вращения копирного вала 41 и кулачкового вала 50 и обеспечивает бесступенчатую регулировку скоростей их вращения. При навивании пружины с опорными крайними витками и с шагом между рабочими витками шаговые упоры 53 и 54 занимают определенное положение по отношению к линии подачи проволоки навиваемой пружины. После навивки первого опорного витка шаговые упоры выдвигаются в рабочее положение н воздействуют на витки, оставаясь в этом положении во время навивки рабочих витков. Перед концом навивки шаговые упоры отводятся в исходиое, нерабочее положение, и второй опориый виток навивается без их воздействия. При навивке правозаходных пружин на витки действует шаговый упор 53, а при навивке левозаходных - шаговый упор 54.
Поступательное движение в рабочее положение шаговым упорам 53 и 54, штангам 55 и 56 и траверсе 57 с ввернутым в нее штоком 58 сообш,ается от кулачков 51 через рычаги 59, 60 и 61. Возвратное движение в исходное положение осуществляется пружиной 67.
Передвижением каретки 62 в плече рычага 60 с помощью винта 63 достигается изменение соотношения плеч рычагов 60 и 61, взаимодействующих между собой и устанавливается величина хода шаговых упоров.
Кулачки 51, установленные на кулачковом валу 50, приводятся во вращение от копнрного вала 41 через блок шестерен 49 и шестерни 42 или 43. При навивке одноконз-сных пружин сцепление происходит через шестерню 42 и меньшую шестерню блока 49 с передаточным отношением 2:1. При навивке двухконусных, бочкообразных, корсетных и цилиндрических пружин сцепление происходит через шестерню 43 и большую шестерню блока 49 с передаточным отношением 1:1.
Пружины, навитые до определенной длины, периодически отрезаются при непрерывной подаче проволоки в результате взаимодействия периферийиого 70 и центрального 68 ножей. Пож 70 вместе с ползушкой 71 приводится в движение эксцентриком вала 75. При вращении эксцентрика верхний конец ползушки 71 движется поступательно, поворачиваясь вокруг оси 73 на небольшой угол.
ЭксцеНтрикоЁые валы 75 и 76, связйннЫё шестернями 78 и 79, периодически приводятся во вращение от постоянно вращающегося вала 80 через электромагнитную муфту 81, периодически включаемую на период отрезки по сигналу от лепестка 52, установленного на кулачковом валу.
Вал 80 через шестерни 82 н 83, телескопический вал 84 и шестерни 85 и 86 приводится в постоянное вращение от приводного вала 18. Телескопический вал 84, передавая рабочее усилие валам 75 и 76 в период отрезки, не препятствует перемещению механизма отрезки, кинематически связанного с механизмом навивки.
Кинематическая связь между механизмами навивки и отрезки обеспечивает перемещение всего механизма отрезки синхронно с механизмом навивки и дает возможность производить отрезку навиваемых пружин на любом диаметре.
Формула изобретения
Автомат для навивки пружин, содержащий
смонтированный на станине механизм правки, подающий механизм с направляющими планками, механизм формообразования, состоящий из двух регулируемых упоров и средств регулировки упоров с копирным диском, а также
шагозадающий механизм и механизм отрезки, состоящий из центрального н наружного ножей, из которых последний установлен с возможностью перемещения в радиальном направлении относительно оси навивки, отличающийся тем, что, с целью расщирения технологических возможностей, центральный нож механизма отрезки установлен с возможностью перемещения в радиальном направлении посредством реечно-зубчатой передачи, а
механизм формообразования и механизм отрезки кинематически связаны носредством синхронизирующего вала и системы шестерни.
Источники информации, принятые во внимание нри экспертизе
1. Патент ФРГ № 1090163, кл. 7d2, 1961.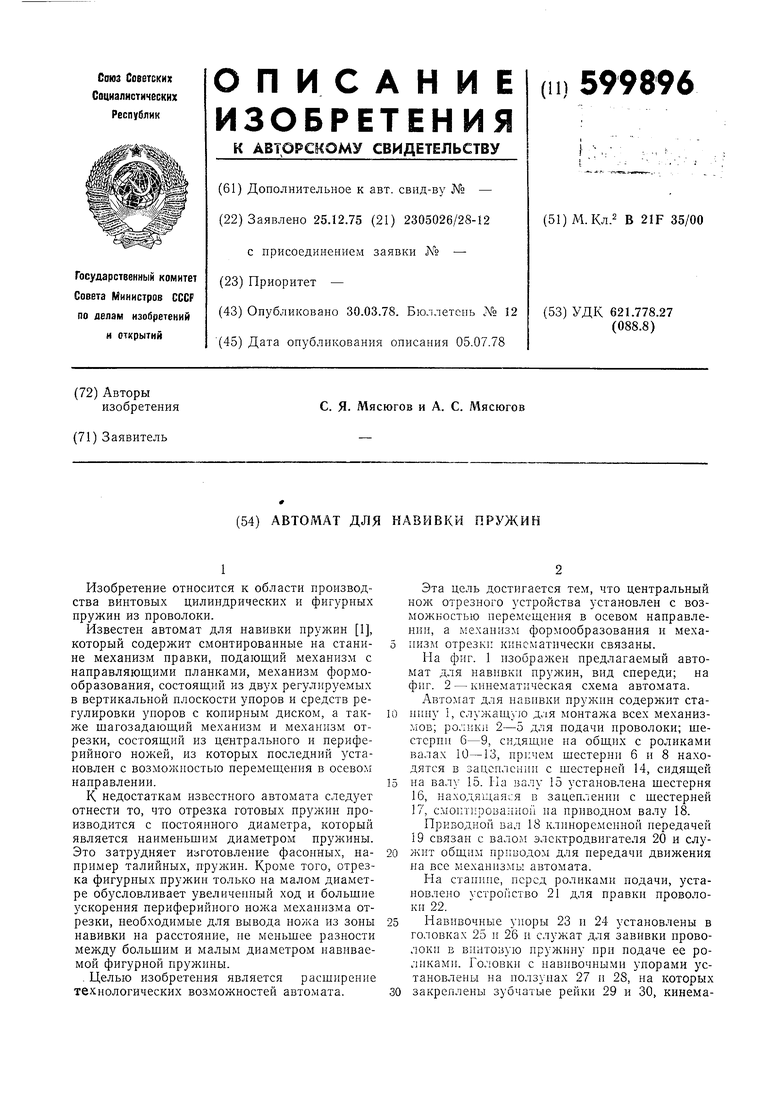
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для навивки пружин | 1976 |
|
SU565761A1 |
| Автомат для навивки пружин | 1978 |
|
SU776725A1 |
| Шагозадающее устройство к пружинонавивочному автомату | 1974 |
|
SU528990A1 |
| Устройство для изготовления пружин растяжения | 1976 |
|
SU698708A1 |
| Автомат для изготовления пружин | 1988 |
|
SU1595612A1 |
| ПРУЖИКОНАВЙВОЧНЫЙ АВТОМАТ | 1968 |
|
SU211508A1 |
| ПРУЖИНОНАВИВОЧНЫЙ АВТОМАТ, ЕГО МЕХАНИЗМЫ РУБКИ, ОБРАЗОВАНИЯ УЗЛА, ПЕРЕМЕЩЕНИЯ ЗАГОТОВОК (ВАРИАНТЫ), ИХ УСТРОЙСТВА ЗАХВАТОВ, ПОДВИЖКИ, ОРИЕНТАЦИИ, ЗАЖИМА, КУЛАЧКОВЫЕ СРЕДСТВА | 2002 |
|
RU2199412C1 |
| УСТРОЙСТВО ДЛЯ НАВИВКИ ПРУЖИНpfi|.{f| пп-,, ^•^itfi, ift'tifl | 1971 |
|
SU420371A1 |
| Автомат для изготовления двухветвевых пружин | 1973 |
|
SU484036A1 |
| Устройство для непрерывной навивки винтовых цилиндрических пружин растяжения с зацепами | 1985 |
|
SU1306630A1 |