СП
со
СП
Изобретение относится к области сельскохозяйственного машиностроения, в частности к устройствам для сбора ягод.
Цель изобретения - повышение надежности,производительности и улучшение условий труда.
На фиг. 1 показан ягодоуборочный комбайн, вид спереди; на фиг. 2 шасси с системой автоматической стабилизации горизонтального положения рамы ягодоубороч- ного комбайна, обший вид; на фиг. 3 - разрез .А -А на фиг. 2; на фиг. 4 - разрез Б - Б на фиг. 2; на фиг. 5 - то же, вариант исполнения.
Ягодоуборочный комбайн содержит убо рочный модуль 1, HaBenjeHHbm на портальное uiaccn 2, включающее ра.му 3 с устройством 4 автоматической стабилизации ее по- .южения и поперечном направлении, .ходовую часть 5 и систему 6 управления. Рама 3 снабжена втулками 7 и 8, в кото- ры.х размещены стойки 9 и 10, связанные через кронп тейны II и 12 с колесами 13 и 14. а также гидроиилиндрами 15 и 16 под1,е.ма, штоки 17 и 18 которых через кронштейны 19 и 20 шарнирно связаны с рамой 3, а цилиндры 21 и 22 па 1нирн() г крон1итейнами 11 и 12.
Система 4 автоматической стабилизации положения рамы 3 содержит 1юмеп1енные в мас,1яный бак 23, подве1пепный на оси 24, укрепленной к раме 3, маятник 25, тяга 26 которого шарпирно связана со штоком гидрораспределителя 27, и подвешенный на оси 28 дополнительный маятник 29. Оси 24 и 28 параллельны и расположены в одной вертикальной плоскости. Гидрораспределитель 27 посредством маслопровода 30 и делителя 31 потока соединен через маслопровод 32 с поршневой полостью гидроцилиндра 16 и через маслопровод 33 со штоковой полостью гидроцилиндра 15, а посредством маслопровода 34 и делителя 35 потока через маслопровод 36 - со штоковой полостью гидроцилиндра 16 и через маслопровод 37 - с поршневой полостью гидроцилиндра 15. Маслопроводами 38-40 гидрораспределитель 27 соединен с масляным баком 23 и маслопроводом 41 - с гидронасосом 12.
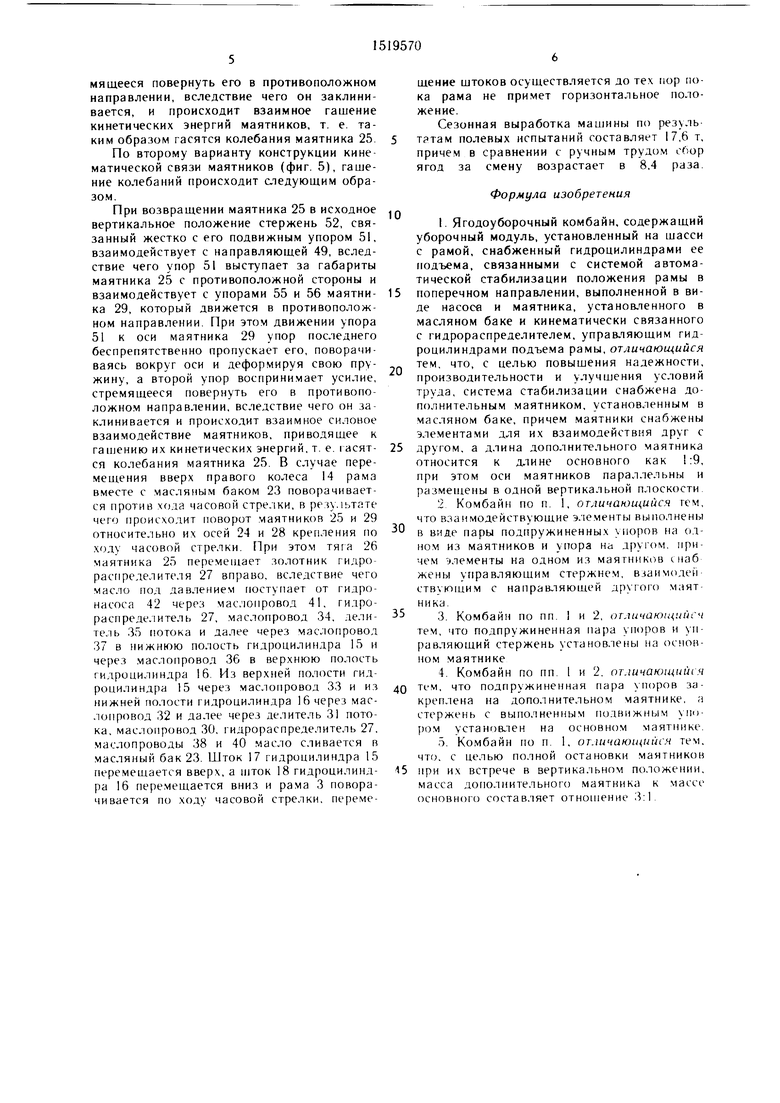
Кинематическая связь маятников по первому варианту конструкции (фиг. 4) содержит упоры 43 и 44, установленные с возможностью поворота на осях 45 и 46 соответственно и связанные плоской пружиной 47, удерживающей упоры в пазу габаритах маятника 25. Причем пружина 47 взаимодействует со стержнем 48, который связан со стабилизирующей направляющей 49 таким образом, что при верхнем вертикальном положении маятника 25 упоры 43 и 44 не касаются вертикальных стенок паза маятника 25 (фиг. 4) и не контактируют с упором 50 маятника 29 при соблюдении условия, что
0
5
0
5
0
5
0
5
ширина упора 50 меньше расстояния между ближними точками упоров 43 и 44.
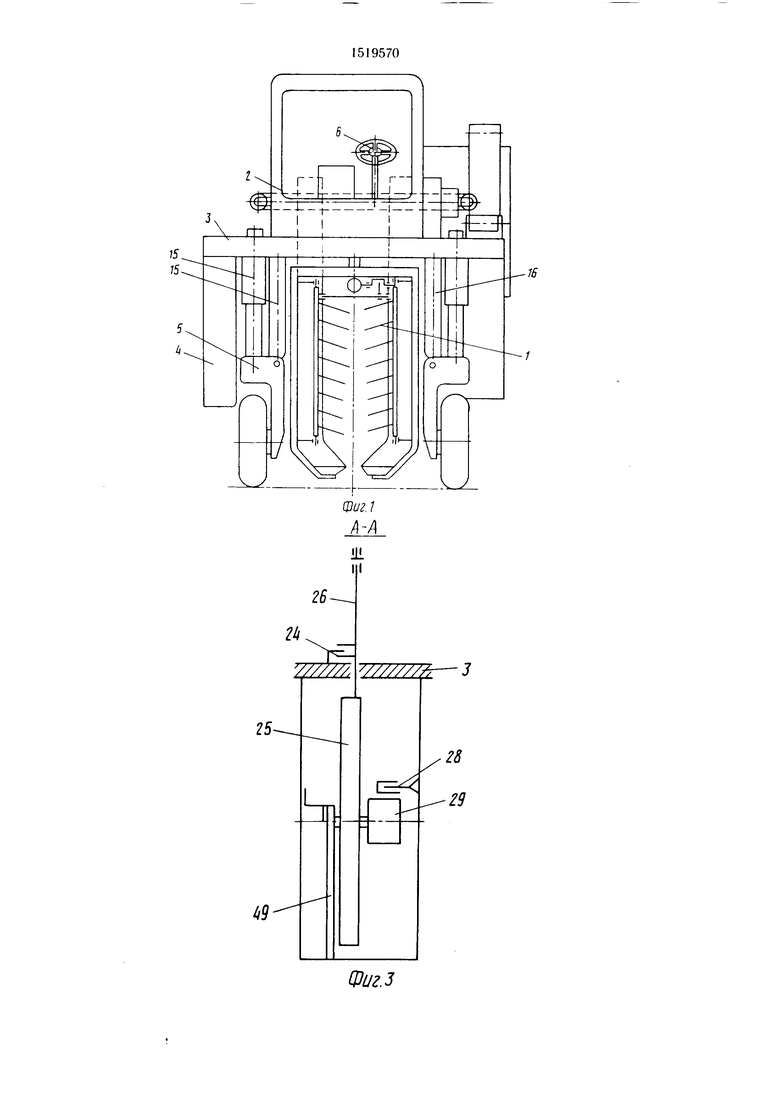
По второму варианту конструкция кинематической связи маятников (фиг. 5) содержит маятник 25, подвижный упор 51, продолжение.м которого является стержень 52, поджатый пружиной 53 к направляющей 49, причем крайнее нижнее Положение упора 51 ограничивается крышкой 54. Маятник 29 содержит упоры 55 и 56, установленный на осях 57 и 58, причем упоры 55 и 56 винтами 59 соединены с плоскими пружинами 60 и 61, которые удерживают их в выдвинутом положении, превышающем габариты маятника в вертикальной плоскости.
При работе ягодоуборочного комбайна уборочный модуль 1, будучи подвешенным к раме 3 njaccH 2, сохраняет вертикальное положение на различных рельефах почвы.
При этом устройство автоматической стабилизации горизонтального положения рамы работает следующим образом.
При подъеме вверх, например, левого колеса 13 (фиг. 2) рама 3 вместе с масляным баком 23 поворачиваются по ходу часовой стрелке, вследствие чего происходит поворот маятников 25 и 29 относительно их oceii 24 и 28 крепления в направлении против хода часовой стрелки (фиг 6). При VTOM тяга 26 (фиг. 2) .маятника 25 перемешает золотник гидрораспределителя 27 Ei.ieBO, вс.1едствие чего масло под давление.м подается от гидронасоса 42 через маслопровод 41, гидрораспределитель 27, маслопровод 30, делитель 31 потока и далее через маслопровод 32 в нижнюю полость гидроцилиндра 16 и через маслопровод 33 в верхнюю полость гидроцилиндра 15. Из верхней полости гидроцилиндра 16 через маслопровод 36 и из нижней полости гидроцилиндра 15 через маслопровод 37 масло поступает в делитель 35 потока, из которого через маслопровод 34, гидрораспределитель 27, маслопроводы 38 и 39 сливается в масляный бак 23. В результате шток 18 гидроцилиндра 16 перемещается вверх, а щток 17 гидроцилиндра 15 вниз, поэтому рама 3 поворачивается против часовой стрелки и стре- митсй занять горизонтальное положение.
При этом возникающие инерционные колебания маятника 25 гасятся благодаря совместной работе с маятником 29. При возвращении маятника 25 в вертикальное исходное положение (фиг. 4) стержень 48 взаимодействует с направляющей 49, вследствие чего пружина 47 изгибается, и упоры 43 и 44 взаимодействуют с упором 50 маятника 29, который движется в противоположном направлении. При движении упора 50 к оси маятника 25 упор последнего беспрепятственно пропускает его, поворачиваясь вокруг своей оси и деформируя пружину 47, но второй упор воспринимает усилие, стремящееся повернуть его в противоположном направлении, вследствие чего он заклинивается, и происходит взаимное гашение кинетических энергий маятников, т. е. таким образом гасятся колебания маятника 25.
По второму варианту конструкции кинематической связи маятников (фиг. 5), гашение колебаний происходит стедующим образом.
При возвраш.ении маятника 25 в исходное вертикальное положение стержень 52, связанный жестко с его подвижным упором 51, взаимодействует с направляющей 49, вследствие чего упор 51 выступает за габариты маятника 25 с противоположной стороны и взаимодействует с упорами 55 и 56 маятника 29, который движется в противоположном направлении. При этом движении упора 51 к оси маятника 29 упор последнего беспрепятственно пропускает его, поворачиваясь вокруг оси и деформируя свою пружину, а второй упор воспринимает усилие, стремящееся повернуть его в противоположном иаправлении, вследствие чего он заклинивается и происходит взаимное силоное взаимодействие маятников, приводящее к гап1ению их кинетических энергий, т. е. 1асят- ся колебания маятника 25. В случае перемещения вверх правого колеса 14 рама вместе с масляным баком 23 поворачивается против хода часовой стрелки, в резу.1ьтате чего происходит поворот .маятников 25 и 29 относительно их осей 24 и 28 крепления по ходу часовой стрелки. При этом тяга 26 маятника 25 перемещает золотник гидро- расгфеделителя 27 вправо, вследствие чего масло под давлением поступает от гидронасоса 42 через маслопровод 41, гилро- распределитель 27, маслопровод 34, делитель 35 потока и далее через маслопровод 37 в нижнюю полость гидроцилиндра 15 и через маслопровод 36 в верхнюю полость гидроцилиндра 16. Из верхней полости гидроцилиндра 15 через маслопровод 33 и из нижней полости гидроцилиндра 16 через маслопровод 32 и далее через делитель 31 потока, маслопровод 30, гидрораспределитель 27, маслопроводы 38 и 40 масло сливается в масляный бак 23. Шток 17 гидроцилиндра 15 перемещается вверх, а шток 18 гидроцилиндра 16 перемещается вниз и рама 3 поворачивается по ходу часовой стрелки, перемещение штоков осуществляется до тех пор пока рама не примет горизонтальное положение.
Сезонная выработка машины по резуль тзтам полевых испытаний составляет 17,6 т, причем в сравнении с ручным трудом сбор ягод за смену возрастает в 8,4 раза.
Формула изобретения
1. Ягодоуборочный комбайн, содержащий уборочный модуль, установленный на шасси с рамой, снабженный гидроцилиндрами ее подъема, связанными с системой автоматической стабилизации положения рамы в
поперечном направлении, выполненной в виде насоса и маятника, установленного в мас тяном баке и кинематически связанного с гидрораспределителем, управляющим гидроцилиндрами подъема рамы, отличающийся
тем, что, с целью повышения надежности, производительности и улучц ения условий труда, систе.ма стабилизации снабжена дополнительным маятником, установленным в масляном баке, причем маятники снабжены элементами для их взаимодействия друг с
другом, а длина дополнительного маятника относится к длине основного как 1:9, при этом оси маятников параллельны и размещены в одной вертикальной плоскости 2. Комбайн по п. 1, отличающийся гем, что взаимодействующие эле.менты выполнены
в виде пары подпружиненных упоров на одном из маятников и упора на другом, причем элементы на одном из маягников снаб жены управляющим стержнем, взаимодей ствующим с направляющей другого маятника.
3. Комбайн по пп. 1 и 2, отличающийся
тем, что подпружиненная пара упоров и управляющий стержень установлены на основном маятнике
4.Комбайн по пп. I и 2. отличающийся тем, что подпружиненная пара упоров закреплена на дополнительном маятнике, а стержень с выполненным подвижным упи- ром установ-тен на основном маятнике.
5.Комбайн по п. 1, отличаюищйся тем, что, с целью полной остановки маятников
при их встрече в вертикальном положении, масса дополнительного маятника к массе основного состав, 1яет отношение 3:1.
У 1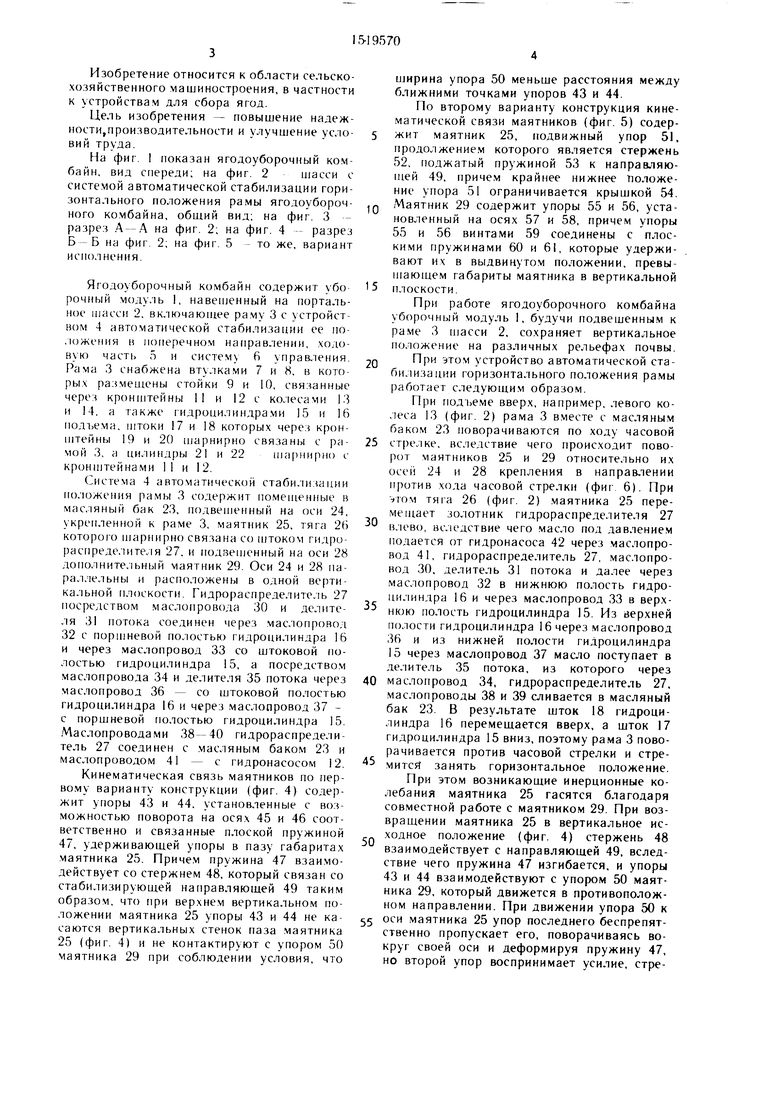
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления рабочими органами сельскохозяйственной машины | 1990 |
|
SU1761012A1 |
| МАШИНА | 2009 |
|
RU2401762C1 |
| Система стабилизации положения рабочего органа дорожностроительной машины | 1984 |
|
SU1203207A1 |
| Широкозахватное почвообрабатывающее орудие | 1984 |
|
SU1189363A1 |
| РУЛЕВАЯ СИСТЕМА ПОВОРОТА КОЛЁС И ПОЛУРАМ ТРАКТОРА | 2015 |
|
RU2590762C2 |
| Разбрасыватель минеральных удобрений на склонах | 1985 |
|
SU1306503A2 |
| ГИДРОМЕХАНИЧЕСКОЕ ПОДЪЕМНОЕ УСТРОЙСТВО ДЛЯ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ ГУСЕНИЧНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 1997 |
|
RU2169696C2 |
| УСТРОЙСТВО УДАРНОГО ДЕЙСТВИЯ ДЛЯ ПОГРУЖЕНИЯ СТЕРЖНЕЙ В ГРУНТ | 2010 |
|
RU2443827C1 |
| Копирующее устройство к почвообрабатывающим машинам для обработки приствольной полосы сада | 1985 |
|
SU1311638A1 |
| Устройство для стабилизации горизонтального положения платформы транспортного средства | 1981 |
|
SU1009817A1 |
Изобретение относится к сельскохозяйственному машиностроению. Цель изобретения - повышение надежности, производительности и улучшение условий труда. Система стабилизации ягодоуборочного комбайна снабжена дополнительным маятником 29, установленным в масляном баке 23. Основной и дополнительный маятники 25 и 29 снабжены элементами для взаимодействия друг с другом, выполненными в виде упоров. При этом длина дополнительного маятника 29 относится к длине основного маятника 25 как 1:9, а оси маятников 25 и 29 параллельны и размещены в одной вертикальной плоскости. При движении комбайна по различным рельефам почвы осуществляется автоматическая стабилизация рамы в горизонтальном положении путем совместной работы маятников 25,29 и перераспределения уровня масла в гидроцилиндрах 15 и 16, изменяющих положения штоков, связанных с рамой комбайна. 4 з.п.ф-лы, 5 ил.
-4
75, /55:
//.
/
сриг.1
АА
111 II
У/7///Л
-16
У///////у-- J
2& -29
Фиг.з
д 1/8 25
5
2В
59 59 57 55
50
Фиг.
.5
59 59
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кишинев, ГСКБ ПО «11лодсе.1ьхозман1, 1985 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Ки нинев, ГСКБ ПО «Плодсельхо uiaui, 1985. | |||
