Изобретение относится к литейному производству, 5 частности к заливочно-дозирую- шим устройствам, используемым с машинами для литья под давлением и кокильными машинами.
Целью изобретения является снижение энергоемкости привода и расширение области применения дозатора.
На фиг. 1 представлен манипулятор с траекторией движения ковша, общий вид; на фиг. 2 - то же, общий вид, разрез; на фиг. 3 - разрез А-А на фиг. 2.
Манипулятор для заливки металла включает корпус 1, шарнирно-установленный на нем при помощи вала 2 транспортный рычаг 3, на конце которого шарнирно установ- лена подеска 4 с ковшом 5 и датчиком уровня металла в печи 6, кулачок 7, установленный на геометрической оси поворота транспортного рычага 3, цепь 8, связывающая кулачок 7 с ведомой звездочкой 9, закрепленной на подвеске 4 соосно с ее шарни- ром, а натяювая ветвь 10 цепи 8 замкнута упругим элементом 11, систему поворота ков- uia, вк;:ючающую привод (не показан), цепную передачу 12, блок звездочек 13 и 14, установленный на валу 2 соосно с ним, замкнутую цепь 15 со звездочкой 16, сидящей на валу 17, другой конец которого несет звездочку 18, замкнутую цепь 19, звездочку 20, закрепленную на оси 21 поворота ковша 5.
Кулачок 7, установленный на оси 22, на другом конце которой закреплен поводок 23, фиксируемый относительно корпуса 1 регулируемыми упорами 24, имеет зубья 25 для зацепления с цепью 8 в секторе, постоянно контактирующем с цепью 8. Остальной про- фи. 1ь кулачка 7 гладкий и состоит из трех участков: первый - с радиусом кривизны, меньшим радиуса ведомой звездочки 9; второй равным радиусу ведомой звездочки 9; третий - больши.м радиуса ведомой звездочки. Все участки сопряжены между собой по плавной кривой.
Манипулятор работает следующим образом.
Привод поворота транспортного рычага 3 через вал 2 осуществляет поворот рычага 3 от печи 26 к машине с заливочным окном, при этом тяговая ветвь цепи 8 огиба- ет профиль кулачка 7, а натяговая ветвь 10 сходит с кулачка 7. Образующуюся при этом некоторую разницу в длине цепи 8 компенсирует упругий элемент 11, имеющий предварительное растяжение. При этом усилие упругого элемента 1 1 создает момент сил
М р,
где гн и Г| - радиусы кулачка для определенного положения рычага 3, перпендикулярные ветвям цепи 8 и 10;
р - усилие упругого элемента 11, меняющееся в процессе поворота рычага 3.
Показанное на фиг. 2 положение кулачка 7 относительно транспортного рычага 3
5
5 0
О
З 0
5
5
0
соответствует крайнему положению ковша 5 в печи 26, при этом разница радиусов г и гт, ЯВЛЯЮЩИХСЯ плечами сил иатял ения ветвей цепи 8, достигает максимального значения в крайних положениях транспортного рычага 3 и равна нулю в среднем вертикальном положении. Следовательно, момент сил от усилия упругого элемента 11 изменяется от максимума, когда ковш 5 находится в печи 26 и силы тяжести рычажной системы создают наибольший момент, до нуля, когда транспортный рычаг 3 находится в среднем вертикальном положении и момент сил тяжести рычажной системы отсутствует, и снова до максимума, когда ковш 5 находится у заливочного окна 28 машины и момент сил тяжести рычажной системы опять увеличился. Причем момент сил, создаваемый упругим элементом, всегда направлен в противоположную сторону от момента сил тяжести рычажной системы. Следовательно, упругий элемент 11 кроме функции натяжного устройства цепи 8 несет функцию балансира, что позволяет снизить мощность привода поворота транспортного рычага 2.
В исходном положении ковш 5 находится в печи 26. Подвеска 4 устанавливается таким образом, чтобы при крайнем положении ковша 5 в печи 26 она была отклонена на определенный уг ол от вертикали в сторону заливочного OK}ia 27 манп1ны. Когда цепь 8 контактирует с первым участком профиля, имеющим радиус кривизны меньп1е радиуса ведомой звездочки 9. подвеска 4 получает вра- 111ение в своем абсолютнс м движении в сторону вращения транспортн(мч) рычага 3. Таким образом, при плоскопнраллельяом движении подвески 4 ТОЧКЕ; закрепления ковша 5 на ней имеет траекторию днижения, близкую к вертикальной прямой (участок а - h траектории движения).
В конце первого участка движения подвеска 4 занимает ве1иикальное положение.
При набегании цепи 8 на второй участок профиля кулачка 7, имеющий радиус кривизны, равный радиусу ведомой звездочки 9, подвеска 4 совершает посгупательное движение, оставаясь в своем абсолютном движении параллельной самой себе (участок b - с траектории движения).
Когда цепь 8 огибает третий участок профиля кулачка 7, имеюпшй радиус кривизны, больший радиуса ведомой звездочки 9, ведо мая зпе.чдочка Г1 и, следовательно. iKj.iiuTKa 4 получают вращение в своем абсолютном движении в сторону, противоположную враше- нию транспортного рычага 3. Подвеска 4 осуществляет движение к машине (участок :-с/траектории движения). В конце третьего участка подеска 4 повернута от вертикали в сторону машины.
Так как все три участка профиля кулачка 7 сопряжены плавными кривыми, то скорость относите,чьного поворота подвески 4 при переходе от участка к участку измепяется плавно, что обеспечивает быстродействие манипулятора. При движении подвески 4 ковш 5 сохраняет свое угловое положение постоянным, так как передаточное отношение сопрягаемых звездочек в кинематической цепи поворота ковша 5 равно единице.
Благодаря тому, что траектория движения ковша в зоне тигля почти близка к вертикальной прямой, манипулятор можно эксплуатировать с печами, имеюш.ими не только широкий, но и достаточно узкий тигель, т. е. с печами менее энергоемкими, что позволит расширить технологические возможности заявленного манипулятора и экономить при этом электроэнергию.
Формула изобретения
пусом поворотным транспортшл) ( /ыча . на конце которого шарнирно установлена пол- веска с ковшом, привод поворота подвески, выполненный в виде ведомой звездочки, установленной на оси поворота подвески, приводного кулачка, установленного на оси поворота транспортного рычага и выполненного с профилем, имеющим участок с радиусом кривизны, равным радиусу ведомой звездочки, и участок с радиусом кривизны больше радиуса ведомой звездочки и цели с упругим элементом, соединяющей между собой ведомую звездочку и кулачок, отличающийся тем, что, с целью снижения энергоемкости привода и расширения области применения дозатора, концы цепи соединены между собой через упругий элемент, а на кулачке выполнен зубчатый сектор, взаимодействующий с цепью, и дополинт.. учас- Манипулятор для заливки металла, со- ток профиля, имеющий радиус кривизны.
10
15

| название | год | авторы | номер документа |
|---|---|---|---|
| Дозатор жидкого металла | 1983 |
|
SU1103941A1 |
| Мускульный привод транспортного средства | 1989 |
|
SU1736824A2 |
| Дозатор жидкого металла | 1980 |
|
SU904887A1 |
| СТАНОК ДЛЯ ГИБКИ ИЗДЕЛИЙПРОКАТА | 1971 |
|
SU320326A1 |
| КОЛЁСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2542220C1 |
| КРИВОЛИНЕЙНЫЙ МНОГОПРИВОДНОЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2001 |
|
RU2209167C2 |
| Устройство для разливки металла | 1980 |
|
SU1419509A3 |
| УСТАНОВКА ДЛЯ ЗАЛИВКИ МЕТАЛЛА В ЛИТЕЙНЫЕ ФОРМЫ | 1989 |
|
RU2033895C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ ТРАНСПОРТНО-ПОГРУЗОЧНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2000 |
|
RU2171194C1 |
| УСТРОЙСТВО ДЛЯ СУШКИ ТОПЛИВНЫХ БРИКЕТОВ | 1992 |
|
RU2039004C1 |

Изобретение относится к литейному производству, в частности к заливочно-дозирующим устройствам, используемым с машинами для литья под давлением и кокильными машинами. Целью изобретения является снижение энергоемкости привода и расширение области применения дозатора. Привод поворота транспортного рычага 3 через вал 2 осуществляет поворот рычага 3 от печи к машине, при этом тяговая ветвь цепи огибает профиль кулачка, а нетяговая ветвь сходит с кулачка. Образующуюся разницу в длине цепи компенсирует упругий элемент, имеющий предварительное растяжение, при этом он создает момент сил, который всегда направлен в противоположную сторону от момента сил тяжести рычажной системы, а это позволяет снизить мощность привода. При контактировании цепи с участком профиля, имеющим радиус кривизны меньше радиуса ведомой звездочки 9, подвеска 4 получает вращение в сторону вращения транспортного рычага и в результате точка крепления ковша имеет траекторию, близкую к вертикальной прямой, что позволяет использовать дозатор с более узкими тиглями.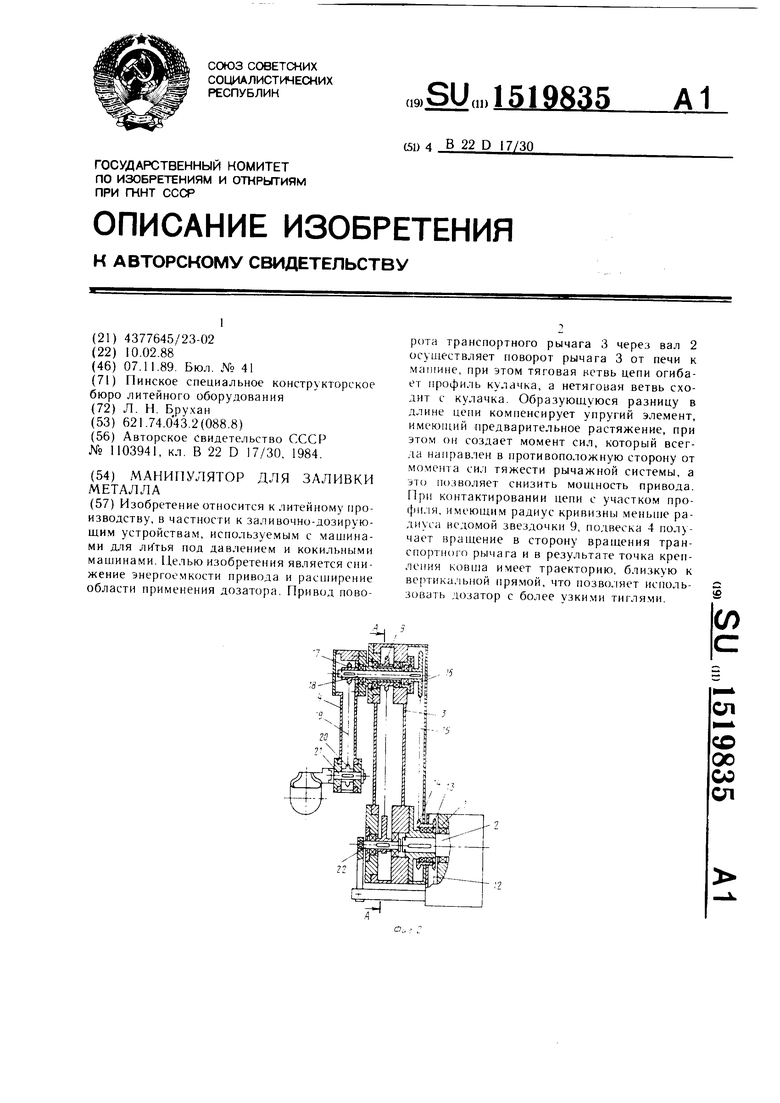
держащий корпус, шарнирно связанный с корменьшии радиуса ведомо-п звездочки.
(ригА
Фие.З
| Дозатор жидкого металла | 1983 |
|
SU1103941A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
