Изобретение относится к шагающим транспортно-погрузочным средствам повышенной проходимости и может быть использовано в самоходных многоопорных транспортных средствах.
Известны шагающие опоры для многоопорных самоходных машин и для транспортных средств повышенной проходимости, выполненные в виде шагающей опоры, содержащей несущий корпус, на котором с каждого борта установлены по два шагающих движителя в виде шарнирных четырехзвенников лямдаобразного типа, снабженных общим башмаком, а также силовой привод и самоблокирующийся межосевой дифференциал (Патент РФ N 2063353, М.кл. B 62 D 57/032, 1996 г.).
Недостатками данных шагающих опор является компоновочная схема с межбортовой дифференциальной связью, предназначенной для снижения вертикальных колебаний корпуса, не обеспечивающая возможность поворота шагающей опоры, и ограниченные возможности по установке на шагающей опоре погрузочного оборудования из-за отсутствия системы горизонтирования корпуса шагающей опоры.
Наиболее близким по техническому уровню и достигаемому результату является устройство в виде шагающей опоры для транспортных средств повышенной проходимости. Шагающая опора содержит несущий корпус, на котором с каждого борта установлены по два шагающих движителя, выполненных в виде шарнирных четырехзвенников лямдаобразного типа, снабженных общим башмаком, и силовой привод, кинематически связанный с кривошипами шагающих движителей (Патент РФ N 2063354, М.кл. B 62 D 57/032, 1996 г.).
Недостатком данной шагающей опоры является компоновочная схема шагающей опоры с использованием простейших шагающих движителей лямбдаобразного типа, не обеспечивающих поворот шагающей опоры, требующих дополнительного подвода мощности на подъем корпуса в каждом цикле (шаге) движения и не обеспечивающих горизонтирование корпуса для установки на шагающей опоре грузового манипулятора или другого погрузочного оборудования.
Данная шагающая опора имеет сравнительно невысокий технический уровень, что обусловлено компоновочной схемой шагающей опоры и силовым приводом шагающих движителей, которые не обеспечивают возможность бесступенчатого регулирования радиуса поворота шагающей опоры, обуславливают неравномерность курсового движения и вертикальные колебания корпуса. В результате снижается маневренность шагающей опоры, не обеспечивается равномерность прямолинейного движения транспортного средства и требуются дополнительные затраты мощности на подъем корпуса в каждом цикле (шаге) движения. Кроме того, отсутствие у шагающей опоры системы горизонтирования корпуса ограничивает возможности по установке на шагающей опоре погрузочного оборудования.
В этой связи важнейшей задачей является создание многофункциональной компоновочной схемы с бесступенчатым регулированием радиуса поворота и возможностью выполнения функций системы горизонтирования корпуса шагающей опоры на базе нового механизма поворота шагающей опоры, связывающего силовой привод шагающей опоры и бортовые редуктора шагающих движителей, с принципиально новым рабочим циклом шагающих движителей при прямолинейном движении и повороте на основе нового закона движения опорных точек шагающего движителя по траектории, что обеспечивает высокую маневренность, снижение вертикальных колебаний корпуса, равномерность курсового движения и позволяет расширить функциональные возможности транспортно-погрузочного средства и установленного на нем погрузочного оборудования.
Техническим результатом заявленной конструкции шагающей опоры является создание многофункциональной компоновочной схемы с бесступенчатым регулированием радиуса поворота и возможностью выполнения функций системы горизонтирования корпуса шагающей опоры с принципиально новым рабочим циклом шагающих движителей при прямолинейном движении и повороте на основе нового закона движения опорных точек шагающего движителя по траектории, что значительно повышает маневренность шагающей опоры, обеспечивает существенное уменьшение затрат мощности на вертикальные колебания корпуса и позволяет горизонтировать корпус транспортно-погрузочного средства при работе погрузочного оборудования, тем самым значительно улучшая эксплуатационные характеристики.
Указанный технический результат достигается тем, что шагающая опора для многоопорных транспортно-погрузочных средств повышенной проходимости содержит корпус транспортно-погрузочного средства с установленными на нем шагающими движителями, выполненными в виде шарнирных четырехзвенников лямдаобразного типа, расположенных в вертикальной плоскости, снабженных башмаками, а силовой привод кинематически связан с шагающими движителями, и снабжена несущими балками, закрепленными на корпусе с правого и левого бортов посредством рычажной подвески, на которых попарно установлены шагающие движители, имеющие механизм поворота шагающей опоры, выполненный в виде асинхронных карданных передач, связывающих силовой привод шагающей опоры и бортовые редукторы шагающих движителей, обеспечивающих побортное изменение скорости движения опорных точек башмаков шагающих движителей по траектории путем изменения угла наклона ведущих и ведомых валов карданной передачи по отношению к промежуточному валу карданной передачи посредством силовых гидроцилиндров механизма поворота, шарнирно закрепленных на корпусе и несущих балках, обеспечивающих дополнительную связь несущих балок и корпуса транспортно-погрузочного средства, при этом вилки промежуточных валов карданных передач расположены во взаимно перпендикулярных плоскостях.
Создание принципиально новой многофункциональной компоновочной схемы на базе нового механизма поворота шагающей опоры с асинхронными карданными передачами, связывающими силовой привод шагающей опоры с бортовыми редукторами шагающих движителей, обеспечивает побортное изменение скорости движения опорных точек башмаков по траектории путем изменения угла наклона ведущих и ведомых валов карданной передачи по отношению к ее промежуточному валу, позволяет реализовать новый рабочий цикл шагающих движителей при прямолинейном движении и повороте, что обеспечивает бесступенчатое регулирование радиуса поворота и значительно улучшает маневренность шагающей опоры.
Введение в шагающую опору асинхронных карданных передач, обеспечивающих ускоренный перенос криволинейных опор шагающих движителей, позволило создать кинематическую схему привода на базе нового закона движения опорных точек по траектории с использованием в качестве рабочего участка части траектории опорных точек шагающих движителей, близкой к горизонтальной и практически с равномерным движением опорных точек, в результате значительно снижается неравномерность курсового движения, а также вертикальные колебания корпуса.
Введение в шагающую опору силовых гидроцилиндров механизма поворота, обеспечивающих дополнительную связь несущих балок шагающих движителей и корпуса шагающей опоры, позволяет на базе рычажной подвески организовать систему горизонтирования корпуса транспортно-погрузочного средства, что облегчает работу установленного на шагающей опоре грузового манипулятора или другого погрузочного оборудования.
Проведенный заявителем анализ уровня техники, включающий поиск по патентам и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявленного изобретения, позволил установить, что заявителем не обнаружен аналог, характеризующийся признаками, идентичными всем существенным признакам заявленного изобретения, а определение из перечня выявленных аналогов прототипа, как наиболее близкого по совокупности признаков аналога, позволило выявить совокупность существенных по отношению к усматриваемому техническому результату отличительных признаков в заявленном объекте, изложенных в формуле изобретения.
Следовательно, заявленное изобретение соответствует требованию "новизна" по действующему законодательству.
Для проверки соответствия заявленного изобретения требованию уровня, заявитель провел дополнительный поиск известных решений с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного изобретения, результаты которого показывают, что заявленное изобретение не следует для специалиста явным образом из известного уровня техники.
Следовательно, заявленное изобретение соответствует требованию "изобретательский уровень".
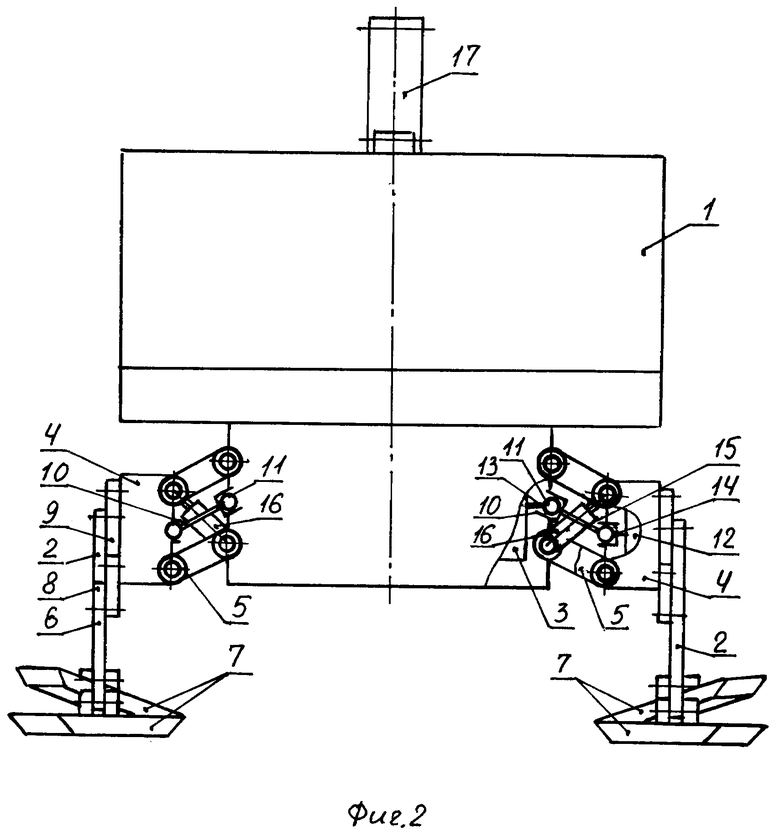
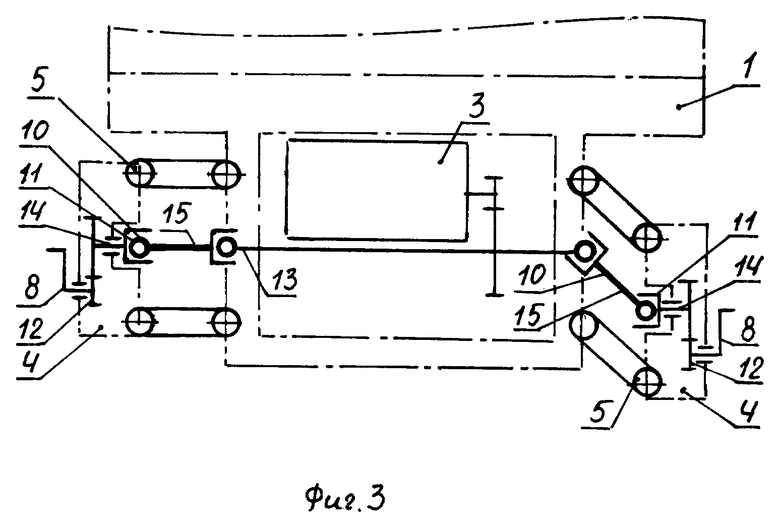
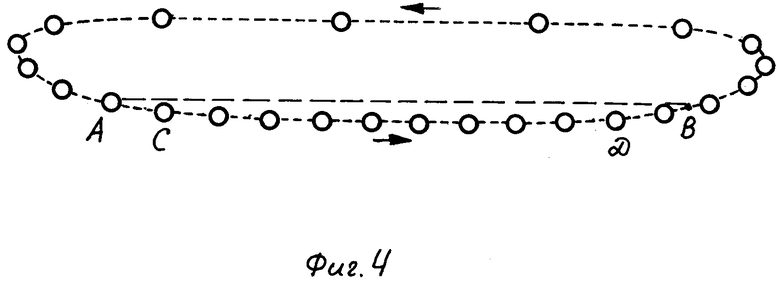
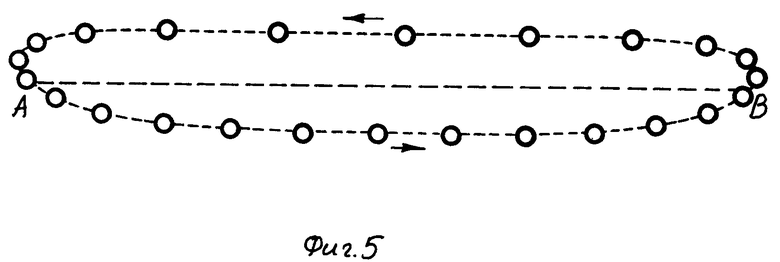
На фиг. 1 представлен общий вид шагающей опоры; фиг. 2 - вид слева на шагающую опору; фиг. 3 - схема работы механизма поворота; фиг. 4 - траектория опорных точек шагающих движителей шагающей опоры при прямолинейном движении; фиг. 5 - траектория опорных течек шагающих движителей забегающего борта при повороте.
Шагающая опора для многоопорных транспортно-погрузочных средств повышенной проходимости содержит корпус 1 транспортно-погрузочного средства с установленными на нем шагающими движителями 2, силовой привод 3, кинематически связанный с шагающими движителями 2, и снабжена несущими балками 4, закрепленными на корпусе 1 с правого и левого бортов посредством рычажной подвески 5 (фиг. 1, 2).
На несущих балках 4 попарно установлены шагающие движители 2, выполненные в виде расположенных в вертикальной плоскости шарнирных четырехзвенников лямбдаобразного типа. Шагающие движители 2 содержат криволинейные опоры 6, снабженные башмаками 7, шарнирно соединенные с кривошипами 8 и с качающимися рычагами 9. Свободные концы качающихся рычагов 9 шарнирно закреплены на несущих балках 4.
Для обеспечения поворота шагающей опоры шагающие движители 2 снабжены механизмом поворота 10 (фиг. 1, 2, 3). Механизм поворота 10 шагающей опоры выполнен в виде асинхронных карданных передач 11, связывающих силовой привод 3 шагающей опоры и бортовые редукторы 12 шагающих движителей 2. Для обеспечения бесступенчатого побортного изменения скорости движения опорных точек башмаков 7 шагающих движителей 2 по траектории посредством изменения угла наклона ведущего вала 13 и ведомого вала 14 карданной передачи 11 по отношению к ее промежуточному валу 15 механизм поворота 10 снабжен силовыми гидроцилиндрами 16 правого и левого бортов, обеспечивающими дополнительную связь несущих балок 4 и корпуса 1 транспортно-погрузочного средства. Для этого силовые гидроцилиндры 16 шарнирно закреплены на корпусе 1 и правой и левой несущих балках 4.
Гидроцилиндры 16 механизма поворота 10, кроме того, образуют совместно с рычажной подвеской 5 систему горизонтирования корпуса 1, предназначенную для обеспечения нормальной работы установленного на транспортно-погрузочном средстве грузового манипулятора 17 или другого погрузочного оборудования.
Для достижения неравномерности вращения ведомого вала 14 карданной передачи 11 и соответственно кривошипа 8 в каждом цикле движения и обеспечения ускоренного переноса криволинейных опор 4 шагающих движителей 2 вилки промежуточных валов 15 карданных передач 11 расположены во взаимно перпендикулярных плоскостях. Поскольку карданная передача 11 обеспечивает за цикл два участка с ускоренным вращением ведомого вала 14, то для обеспечения нормальной работы шагающих движителей 2 - с одной фазой опоры на грунт и одной фазой ускоренного переноса за цикл, передаточное отношение бортовых редукторов 12 выбирается таким образом, что один оборот ведущего вала 13 карданной передачи 11 соответствует двум оборотам кривошипа 8. При этом для обеспечения ускоренного движения опорных точек криволинейных опор 6 и башмаков 7 именно в фазе переноса взаимное расположение вилки ведомого вала 14 карданной передачи 11 и кривошипа 8 шагающего движителя 2 выбирается так, что при положении вилки, соответствующем наибольшей угловой скорости вращения ведомого вала 14, кривошип 8 занимает положение, при котором опорная точка криволинейной опоры 6 находится в верхней части траектории - на участке, соответствующем фазе ускоренного переноса.
Обеспечение фазы ускоренного переноса позволяет использовать в качестве рабочего участка часть траектории опорных точек (фиг. 4, 5) шагающих движителей 2, близкую к горизонтальной и практически с равномерным движением опорных точек. В результате снижается неравномерность курсового движения и вертикальные колебания корпуса 1 шагающей опоры.
Шагающая опора для многоопорных транспортно-погрузочных средств повышенной проходимости работает следующим образом. В момент начала движения крутящий момент от силового привода 3 шагающей опоры подается на карданные передачи 11 и через бортовые редукторы 12 передается на кривошипы 8 шагающих движителей 2 (фиг. 1, 2, 3). Кривошипы 8 шагающих движителей 2 начинают вращаться и приводят в движение криволинейные опоры 6 и качающиеся рычаги 9, тем самым осуществляя движение шагающих движителей 2. Поскольку, как минимум, один из каждой пары шагающих движителей 2 находится в опоре на грунт, то за счет взаимодействия башмаков 5 указанных шагающих движителей 2 с грунтом шагающая опора начинает движение.
При движении шагающей опоры шагающие движители 2 последовательно совершают рабочий цикл, включающий фазу опоры на грунт, соответствующий участку AB траектории опорной точки (фиг. 4) и фазу переноса, соответствующую участку BA траектории. Полный рабочий цикл (шаг) осуществляется за половину оборота ведущего вала 13 карданной передачи 11, поскольку один оборот ведущего вала 13 карданной передачи 11 соответствует двум оборотам кривошипа 6 шагающего движителя 2.
При равномерном вращении ведущего вала 13 шарнир Кардана-Гука будет обеспечивать неравномерное вращение промежуточного вала 15 асинхронной карданной передачи 11. Поскольку вилки промежуточных валов 15 карданных передач 11 расположены во взаимно перпендикулярных плоскостях, то неравномерность вращения ведомого вала 14 усиливается. В результате кривошипы 8 в течение каждого цикла движения вращаются неравномерно, чем обеспечивается ускоренный перенос криволинейных опор 6 шагающих движителей 2. Карданная передача 11 обеспечивает за один оборот два участка с ускоренным вращением ведомого вала 14. При этом, так как один оборот ведущего вала 13 асинхронной карданной передачи 11 соответствует двум оборотам кривошипа 8, шагающий движитель 2 совершает два рабочих цикла. Взаимное расположение вилки ведомого вала 14 карданной передачи 11 и кривошипа 8 шагающего движителя 2 обеспечивает ускоренное движение опорных точек криволинейных опор 6 и башмаков 7 непосредственно в фазе переноса.
При прямолинейном движении шагающей опоры шагающие движители правого и левого борта совершают одинаковый рабочий цикл.
Каждую половину цикла работы каждой пары шагающих движителей 2 можно подразделить на следующие три основные стадии:
- первый шагающий движитель 2 каждой пары шагающих движителей находится в фазе опоры на грунт в начале рабочего участка AB траектории опорной точки (фиг. 4), второй - в конце фазы опоры на грунт в точке D траектории и совместно с первым шагающим движителем 2 осуществляет рабочий ход;
- первый шагающий движитель продолжает находиться в фазе опоры на грунт, достигает точку C траектории и продолжает осуществлять рабочий ход, второй - проходит точку B траектории и начинает фазу ускоренного переноса;
- первый шагающий движитель находится в фазе опоры на грунта и его опорная точка приближается к точке D траектории, второй - завершает фазу ускоренного переноса, проходит точку A траектории, входит в зацепление с грунтом и начинает осуществлять вместе с первым шагающим движителем рабочий ход.
После достижения опорной точки второго шагающего движителя точки A траектории начинается вторая половина рабочего цикла, аналогичная первой. При этом первый шагающий движитель 2 каждой пары шагающих движителей 2 меняется местом с вторым.
Подобный новый рабочий цикл с фазой ускоренного переноса башмаков 7 позволяет в качестве рабочего участка AB взять ту, сравнительно небольшую, часть траектории, где она близка к горизонтальной и где движение опорной точки по траектории практически равномерно (см. фиг. 4, где точки на траектории расставлены через равные промежутки времени). Это резко снижает неравномерность курсового движения шагающей опоры и сводит к минимуму вертикальные колебания корпуса в каждом цикле движения.
После завершения полного рабочего цикла шагающих движителей 2 он повторяется.
При осуществлении поворота, например, влево оператор транспортно-погрузочного средства посредством силового гидроцилиндра 16 механизма поворота 10 правого (забегающего) борта уменьшает угол наклона рычагов рычажной подвески 5 (фиг. 3) и соответственно угол наклона ведущих 13 и ведомых валов 14 карданной передачи 11 по отношению к промежуточному валу 15 карданной передачи 11. Уменьшение указанного угла приводит к уменьшению неравномерности вращения ведомого вала 14 и соответственно кривошипов 8 шагающих движителей 2 забегающего борта. В результате у шагающих движителей 2 забегающего борта изменяется закон движения опорных точек по траектории (фиг. 5) - уменьшается их скорость движения в фазе ускоренного переноса, а в опорной фазе, наоборот, имеет место рост скорости, что приводит к увеличению скорости движения борта. Поскольку скорость противоположного (отстающего) борта шагающей опоры при этом не изменяется, то транспортно-погрузочное средство начинает двигаться криволинейно, осуществляя поворот.
Минимальный радиус поворота имеет место при нулевом значении угла наклона ведущих 13 и ведомых валов 14 карданной передачи 11 по отношению к ее промежуточному валу 15. В этом случае ведомый вал 14 карданной передачи 11 и соответственно кривошипы 8 шагающих движителей 2 забегающего борта вращаются равномерно и в рабочем цикле фаза переноса не будет ускоренной.
Механизм поворота 10 позволяет оператору бесступенчато изменять радиус поворота шагающей опоры. Это существенно повышает маневренность транспортно-погрузочного средства и дает ему возможность работать на экологически ранимом почвенном покрове.
При работе установленного на шагающей опоре погрузочного оборудования, например грузового манипулятора 17, силовые гидроцилиндры 16 механизма поворота 10 позволяют на базе рычажной подвески 5 организовать систему горизонтирования корпуса 1. При неработающем силовом приводе 3 горизонтальность корпуса 1 достигается путем изменения углов наклона рычагов рычажной подвески 5 посредством силового гидроцилиндра 16 механизма поворота 10. В результате меняется положение несущих балок 4 правого и левого бортов по отношению к корпусу 1, чем достигается горизонтальная установка корпуса 1 на грунте.
Возможность горизонтальной установки корпуса 1 шагающей опоры повышает функциональные возможности установленного на транспортно-погрузочном средстве погрузочного оборудования и дает ей возможность работать в условиях большого уклона местности.
Таким образом, вышеуказанные сведения свидетельствуют о выполнении при использовании изобретения следующей совокупности условий:
шагающая опора для многоопорных транспортно-погрузочных средств повышенной проходимости предназначена для применения в транспортно-технологических средствах, работающих на экологически ранимых и с низкой несущей способностью грунтах, причем новая многофункциональная компоновочная схема с принципиально новым рабочим циклом шагающих движителей при прямолинейном движении и повороте на базе нового механизма поворота с возможностью выполнения функций системы горизонтирования корпуса обеспечивает бесступенчатое регулирование радиуса поворота и ускоренный перенос башмаков шагающих движителей, что значительно улучшает маневренность и функциональные возможности шагающей опоры и снижает энергозатраты на подъем корпуса при движении;
для заявленного изобретения в том виде, как оно охарактеризовано в формуле изобретения, подтверждена возможность его осуществления с помощью вышеописанных конструктивных решений и способов применения;
шагающая опора для многоопорных транспортно-погрузочных средств повышенной проходимости, воплощенная в заявленном изобретении, при его осуществлении способна обеспечить достижение усматриваемого заявителем достигаемого технического результата.
Следовательно, заявленное изобретение соответствует требованию "промышленная применимость".
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2000 |
|
RU2174085C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2001 |
|
RU2207283C2 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063354C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН ТРАНСПОРТНО-ПОГРУЗОЧНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1998 |
|
RU2153437C2 |
| ШАГАЮЩАЯ ОПОРА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1999 |
|
RU2156712C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН И ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063353C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2000 |
|
RU2191131C2 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2008 |
|
RU2368529C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1999 |
|
RU2156711C1 |
| ШАГАЮЩАЯ ОПОРА | 1992 |
|
RU2067941C1 |
Изобретение относится к шагающим транспортным средствам. Опора содержит корпус (1), шагающие движители (2), силовой привод (3) и несущие балки (4), на которых попарно установлены с правого и левого бортов посредством рычажной подвески (5) шагающие движители. Для обеспечения поворота шагающие движители (2) снабжены механизмом поворота (10), выполненным в виде асинхронных карданных передач (11), связывающих силовой привод (3) шагающей опоры и бортовые редукторы (12) шагающих движителей (2). Для обеспечения бесступенчатого побортного изменения скорости движения опорных точек башмаков (7) посредством изменения угла наклона ведущего вала (13) и ведомого вала (14) карданной передачи (11) по отношению к ее промежуточному валу (15) механизм поворота (10) снабжен силовыми гидроцилиндрами (16) для дополнительной связи несущих балок (4) и корпуса (1). Гидроцилиндры (16) механизма поворота (10) образуют совместно с рычажной подвеской (5) систему горизонтирования корпуса (1). Изобретение направлено на повышение маневренности, уменьшение затрат мощности на вертикальные колебания корпуса и улучшение эксплуатационных характеристик. 5 ил.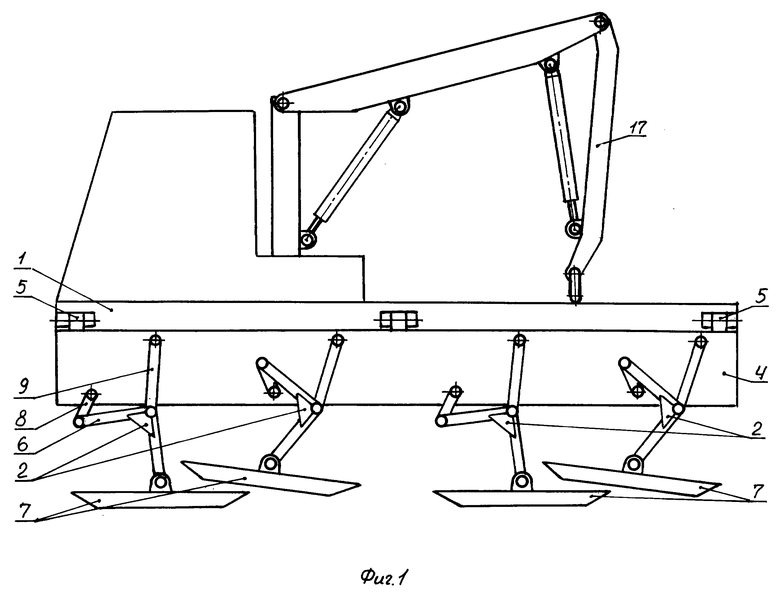
Шагающая опора для многоопорных транспортно-погрузочных средств повышенной проходимости, содержащая корпус транспортно-погрузочного средства с установленными на нем шагающими движителями, выполненными в виде шарнирных четырехзвенников лямбдаобразного типа, расположенных в вертикальной плоскости, снабженных башмаками, и силовой привод, кинематически связанный с шагающими движителями, отличающаяся тем, что она снабжена несущими балками, закрепленными на корпусе с правого и левого бортов посредством рычажной подвески, на которых попарно установлены шагающие движители, имеющие механизмы поворота шагающей опоры, выполненные в виде асинхронных карданных передач, связывающих силовой привод шагающей опоры и бортовые редукторы шагающих движителей, обеспечивающие побортное изменение скорости движения опорных точек башмаков шагающих движителей по траектории путем изменения угла наклона ведущих и ведомых валов карданных передач по отношению к промежуточному валу карданных передач, посредством силовых гидроцилиндров механизма поворота, шарнирно закрепленных на корпусе и несущих балках, обеспечивающих дополнительную связь несущих балок и корпуса транспортно-погрузочного средства, при этом вилки промежуточных валов карданных передач расположены во взаимно перпендикулярных плоскостях.
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063354C1 |
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| US 4527650 A, 09.07.1985 | |||
| US 5219410 A, 15.06.1993. | |||
