Иэобретение относится к автоматизации станочного оборудования и может быть использовано для автоматической юстировки наконечников разъемных соединителей волоконно-оптических линий связи при их обработке.
Целью изобретения является повышение точности юстировки волоконно-оптических элементов перед его обработкой а шпинделе станка за счет автоматизации совмещения центра укрепленного в цанге оптического волокна с осью вращения шпинделя и обеспечения реверсного режима электропривода в крайних положениях эксцентриков радиального перемещения и получения однозначности регулирования.
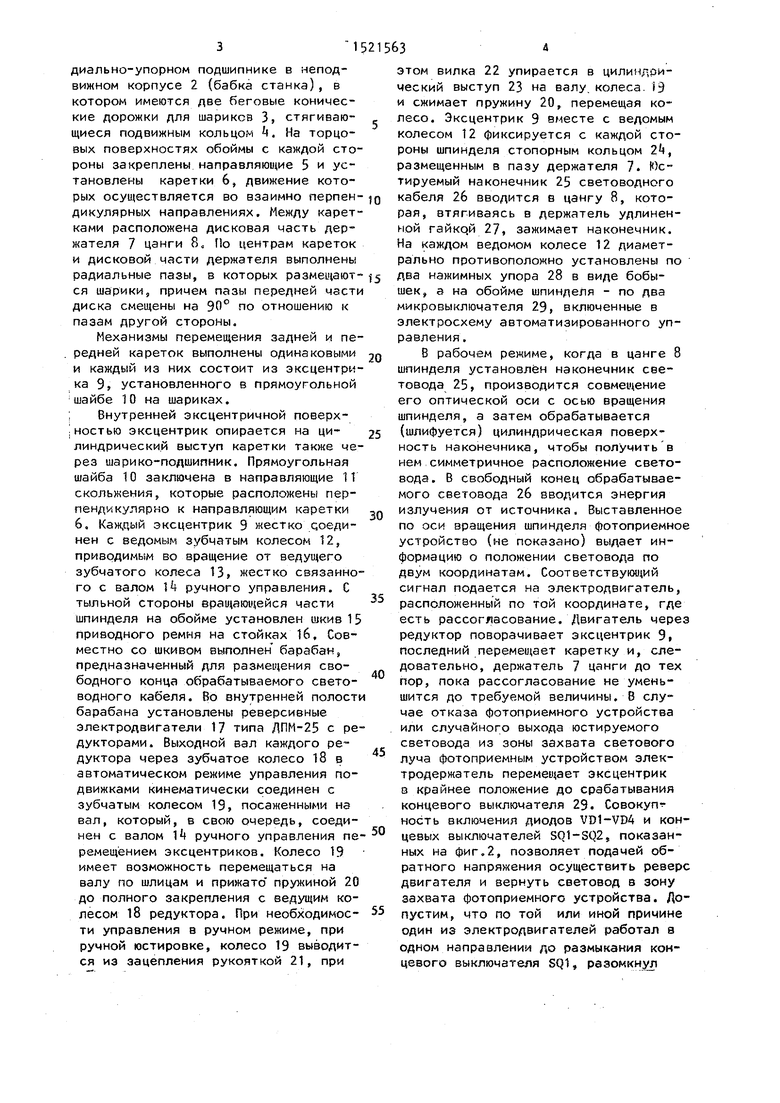
На фиг.1 представлена схема юсти ровочного шпинделя; на фиг.2 - его электрическая схема.
Шпиндель представляет собой вращающуюся обойму 1, установленную на радиально-упорном подшипнике в неподвижном корпусе 2 (бабка станка), в котором имеются две беговые конические дорожки для шариков 3, стягивающиеся подвижным кольцом . На торцовых поверхностях обоймы с каждой стороны закреплены направляющие 5 и установлены каретки 6, движение которых осуществляется во взаимно перпендикулярных направлениях. Между каретками расположена дисковая часть держателя 7 цанги 8. По центрам кареток и дисковой части держателя выполнены радиальные пазы, в которых размещают- ся шарики, примем пазы передней части диска смещены на по отношению к пазам другой стороны.
Механизмы перемещения задней и передней кареток выполнены одинаковыми и каждый из них состоит из эксцентрика 9 установленного в прямоугольной шайбе 10 на шариках. ; Внутренней эксцентричной поверх- |ностью эксцентрик опирается на ци- линдрический выступ каретки также через шарико-подшипник. Прямоугольная шайба 10 заключена в направляющие 11 скольжения, которые расположены перпендикулярно к направляющим каретки 6. Каж,с1ый эксцентрик 9 жестко соединен с ведомым зубчатым колесом 12, приводимым во вращение от ведущего зубчатого колеса 13, жестко связанного с валом 14 ручного управления. С тыльной стороны вращающейся части шпинделя на обойме установлен шкив 15 приводного ремня на стойках 16, Совместно со шкивом выполнен барабан, предназначенный для размещения свободного конца обрабатываемого свето- водного кабеля. Во внутренней полости барабана установлены реверсивные электродвигатели 17 типа ЛПМ-25 с редукторами. Выходной вал каждого редуктора через зубчатое колесо 18 в автоматическом режиме управления подвижками кинематически соединен с зубчатым колесом 19, посаженными на вал, который, в свою очередь, соединен с валом 1 ручного управления перемещением эксцентриков. Колесо 19 имеет возможность перемещаться на валу по шлицам и прижато пружиной 20 до полного закрепления с ведущим колесом 18 редуктора. При необходимое- ти управления в ручном режиме, при ручной юстировке, колесо 19 выводится из зацепления рукояткой 21, при
этом вилка 22 упирается в цилиндрический выступ 23 на валу, колеса.19 и сжимает пружину 20, перемещая колесо. Эксцентрик 9 вместе с ведомым колесом 12 фиксируется с каждой стороны шпинделя стопорным кольцом 2, размещенным в пазу держателя 7, Н)с- тируемый наконечник 25 световодного кабеля 26 вводится в цангу 8, которая, втягиваясь в держатель удлиненной гайкрй 27, зажимает наконечник. На каждом ведомом колесе 12 диаметрально противоположно установлены по два нажимных упора 28 в виде бобышек, а на обойме шпинделя - по два микровыключателя 29, включенные в электросхему автоматизированного управления.
В рабочем режиме, когда в цанге 8 шпинделя установлен наконечник световода 25, производится совмещение его оптической оси с осью вращения шпинделя, а затем обрабатывается (шлифуется) цилиндрическая поверхность наконечника, чтобы получить в нем симметричное расположение световода. В свободный конец обрабатываемого световода 26 вводится энергия излучения от источника. Выставленное по оси вращения шпинделя фотоприемное устройство (не показано) выдает информацию о положении световода по двум координатам. Соответствующий сигнал подается на электродвигатель, расположенный по той координате, где есть рассогласование. Двигатель через редуктор поворачивает эксцентрик 9 последний перемещает каретку и, следовательно, держатель 7 цанги до тех пор, пока рассогласование не уменьшится до требуемой величины, В случае отказа фотоприемного устройства или случайного выхода юстируемого световода из зоны захвата светового луча фотоприемным устройством электродержатель перемещает эксцентрик в крайнее положение до срабатывания концевого выключателя 29. Совокуп - ность включения диодов VD1-VD4 и концевых выключателей S01-SQ2, показанных на фиг.2, позволяет подачей обратного напряжения осуществить реверс двигателя и вернуть световод в зону захвата фотоприемного устройства. Допустим, что по той или иной причине один из электродвигателей работал а одном направлении до размыкания концевого выключателя SQI, разомкнул
П
15
16
fioopfft/ffcf/rtcf x Qg УУ1
/flyvff AStno .
Фи.г
лг. r-)
tJe(y)
15 e

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для прецизионной установки оптических наконечников | 1989 |
|
SU1682958A1 |
| Юстировочный стенд | 1988 |
|
SU1595800A1 |
| КОМБИНИРОВАННЫЙ ПРИВОД ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА ОТ ЭЛЕКТРОДВИГАТЕЛЯ И/ИЛИ ОТ РУЧНОГО УСИЛИЯ (ВАРИАНТЫ) | 2002 |
|
RU2226633C1 |
| Гайковерт | 1989 |
|
SU1685698A1 |
| АВТОМАТИЗИРОВАННЫЙ ИНЪЕКТОР ДЛЯ ВВЕДЕНИЯ ЛЕКАРСТВЕННЫХ СРЕДСТВ | 2022 |
|
RU2793052C1 |
| УСТРОЙСТВО ДЛЯ СТЫКОВКИ ВОЛОКОННОГО СВЕТОВОДА С ИЗЛУЧАТЕЛЕМ | 1992 |
|
RU2051394C1 |
| Датчик активного контроля к станку для центрирования наконечников соединителей волоконных световодов | 1985 |
|
SU1350491A1 |
| Пневматический винтоверт | 1984 |
|
SU1284818A1 |
| Хонинговальный станок для обработки цилиндрических поверхностей | 1986 |
|
SU1563951A2 |
| ПРИВОД ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2006 |
|
RU2339858C2 |
Изобретение относится к автоматизации станочного оборудования и может быть использовано для автоматической юстировки наконечников разъемных соединений волоконно-оптических линий связи при их обработке. Целью изобретения является повышение точности юстировки волоконно-оптических элементов перед обработкой в шпинделе станка за счет автоматизации совмещения центра укрепленного в цанге оптического волокна с осью вращения шпинделя и обеспечения реверсного режима электропривода в крайних положениях эксцентриков радиального перемещения и получения однозначности регулирования. Шпиндель имеет двухкоординатные механизмы эксцентрикового типа, которые при своем вращении перемещают держатель цанги с обрабатываемым наконечником световода по двум взаимно перпендикулярным направлениям до полного совмещения оптической оси вращения с осью вращения шпинделя. Юстировка световода производится относительно фотоприемника, заранее выставленного по оси вращения шпинделя посредством электроприводов, каждая из которых через свой редуктор приводит во вращение соответствующий эксцентрик. Конечные положения эксцентриков в пределах их углов разворота на 180° контролируются концевыми выключателями, включенными в схему управления реверсивных электродвигателей типа ДПМ. 1 з.п. ф-лы, 2 ил.
| Руководство по эксплуатации | |||
| Транспортер для перевозки товарных вагонов по трамвайным путям | 1919 |
|
SU105A1 |
