сл
го
О1
00
о
tpue.i
Изобретение относится к машиностроению и может быть использовано в гибких производственных системах и робото- технических комплексах.
Целью изобретения является повышение надежности в работе вакуумного захвата.
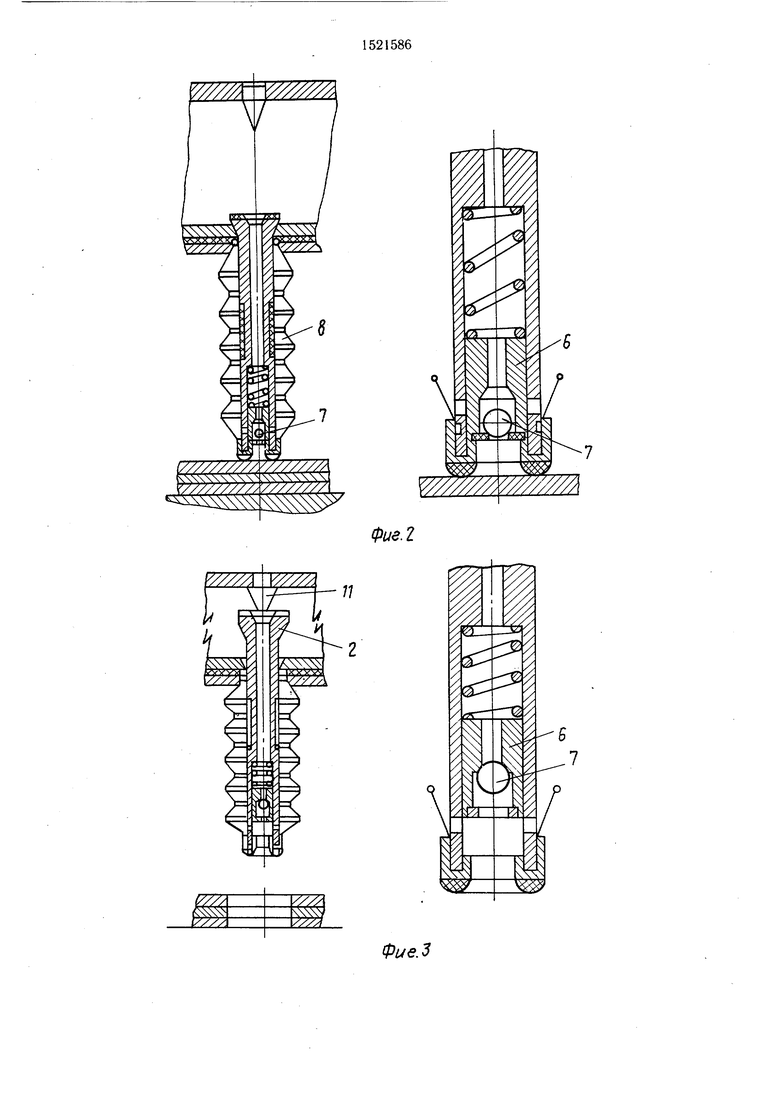
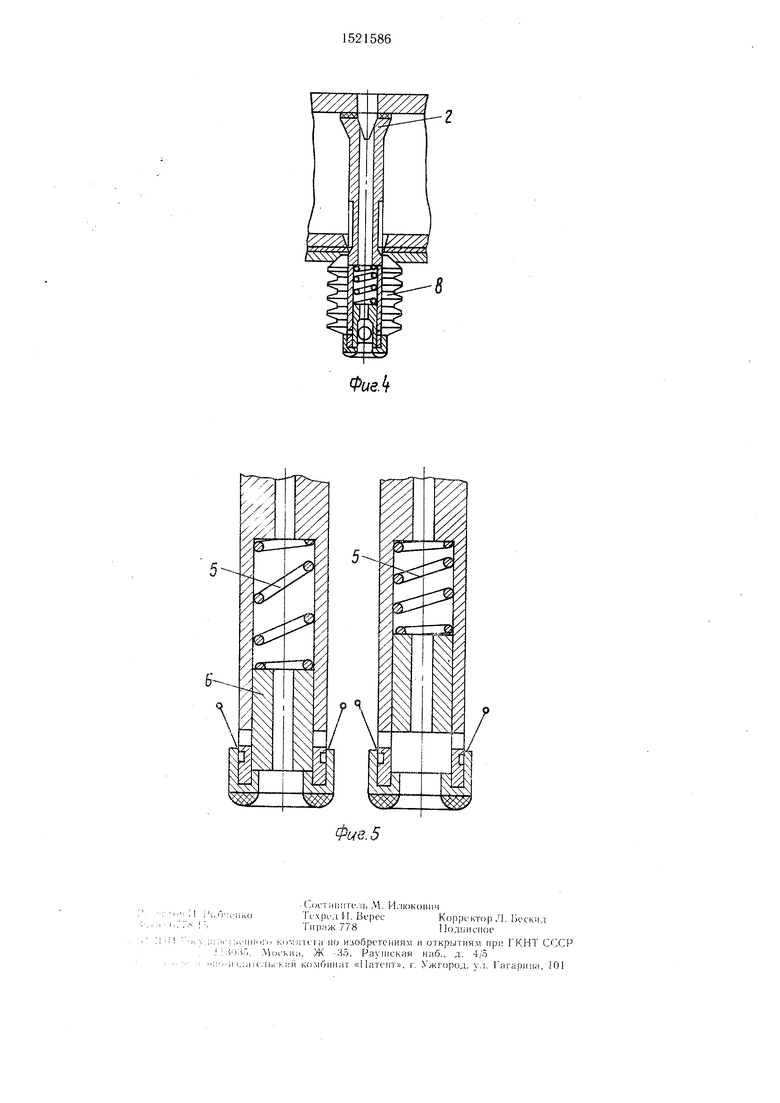
На фиг. 1 показан вакуумный захват, обш,ий вид; на фиг. 2 - захватный элемент, имеющий контакт с поверхностью детали; на фиг. 3 - захватный элемент, не имеющий контакта с поверхностью детали; на фиг. 4 - то же, во втянутом положении; на фиг. 5 - возможный вариант выполнения захватного элемента.
Устройство содержит корпус 1 с захватными элементами 2. На корпусе размещены фиксаторы 3. Захватные элементы 2 снабжены ниппельным клапаном 4 и пружиной 5, подпружинивающей золотник 6 с шариковым клапаном 7. Захватные элементы 2 размещены в. гофрированных патрубках 8, закрепленных одним концом на корпусе 1, а другим - на захватном элементе 2. Для подвода рабочей среды в захватных элементах 2 выполнены каналы 9, а корпус 1 соединен со штуцером 10. Каждому захватному элементу 2 соответствует конусовой щтырь 11, закрепленный на корпусе 1..
Устройство работает следующим образом.
Исходное положение захватных элементов 2 показано на фиг. 1. После установки вакуумного захвата на транспортируемую деталь штуцер fO соединяется с источником вакуумирования. Захватный элемент 2, имеющий контакт с поверхностью детали, присасьшает деталь и не меняет своего положения (см. фиг. 2).
Если захватный элемент 2 не имеет контакта с поверхностью детали, то шариковый клапан 7 закрывается. За счет
разности давлений золотник 6 перемещается, сжимая пружину 5, что приводит к стравливанию воздуха из гофрированного патрубка 8. Гофрированный патрубок 8 сжи- мается, поднимая захватный элемент 2. Фиксатор 3 удерживает захватный элемент 2 в таком положении. Конусовой штырь 1 служит для дополнительной фиксации верхнего положения захватного элемента 2.
После переноса детали на рабочую позицию через штуцер 10 в корпус 1 подается сжатый воздух. Шариковый клапан 7 перекрывает канал 9, за счет чего происходит опускание захватного элемента 2 в исходное положение. Одновре- менно гофрированный патрубок 8 разжимается под действием сжатого воздуха, поступающего через ниппельный клапан 4.
Для уменьшения габаритов схвата золотник 6 может быть выполнен без шарикового клапана 7 (см. фиг. 5).
Формула изобретения
Вакуумный захват, содержащий корпус с . размещенными в нем захватными элемен25 тами, имеющими возможность осевого перемещения и фиксации относительно корпуса, при этом в захватных элементах выполнены каналы, снабженные щариковыми клапанами, отличающийся тем, что, с целью повышения надежности, захватные элементы
30 расположены в полостях дополнительно введенных гофрированных патрубков, закрепленных одним концом на корпусе, а другим - на захватном элементе, при этом каналы захватных элементов дополнительно снабжены подпружиненными золотниками и
35 ниппельными клапанами, соединяюшими каналы захватных элементов с полостями гофрированных патрубков, а шариковые клапаны расположены в золотниках.
/7//////////7///л
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВОЗДЕЙСТВИЯ НА ПРИЗАБОЙНУЮ ЗОНУ СКВАЖИН | 1999 |
|
RU2175719C2 |
| Вакуумный захват | 1988 |
|
SU1705068A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЗАГОТОВКИ В МАШИНУ ДЛЯ КОМПРЕССИОННОГО ФОРМОВАНИЯ | 2008 |
|
RU2463161C2 |
| МНОГОКАНАЛЬНЫЙ КЛАПАН ДЛЯ ПЕРЕКЛЮЧЕНИЯ, ДОЗИРОВАНИЯ И ПЕРЕМЕЩЕНИЯ МАЛЫХ ПОТОКОВ И КОЛИЧЕСТВ ЖИДКОСТИ | 2022 |
|
RU2785697C1 |
| Соединяющий клапан | 1979 |
|
SU796602A1 |
| Устройство для захвата и подачи слюдяных подборов | 1986 |
|
SU1331776A1 |
| Схват манипулятора | 1985 |
|
SU1585149A1 |
| Вакуумный эжекторный захват | 1983 |
|
SU1134521A1 |
| Схват робота | 1987 |
|
SU1502299A1 |
| Электрический разъем | 1986 |
|
SU1457024A1 |
Изобретение относится к машиностроению и может быть использовано в робототехнических комплексах. Целью изобретения является повышение надежности работы вакуумного захвата. Захват содержит корпус 1 с захватными элементами 2 и фиксаторами 3. Захватные элементы 2 размещены в гофрированных патрубках 8 и снабжены ниппельным клапаном 4 и золотником 6 с пружиной 5 и шариковым клапаном 7, расположенными в канале 9. Для захвата детали штуцер 10 подключается к источнику вакуумирования. Захватный элемент 2, имеющий контакт с поверхностью детали, присасывает деталь и не меняет своего положения. Если же контакта с деталью нет, то шариковый клапан 7 закрывается, золотник 6 перемещается, сжимая пружину 5. Из гофрированного патрубка 8 выходит воздух, и он сжимается, поднимая захватный элемент 2. После переноса детали через штуцер 10 подается сжатый воздух. Шариковый клапан 7 перекрывает канал 9, через ниппельный клапан 4 в гофрированный патрубок 8 поступает воздух, что приводит к возврату захватного элемента 2 в исходное положение. 5 ил.
Y////A
Щ..
Фие.г
Фие.
Фие.
| Головка манипулятора | 1980 |
|
SU1041287A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
