СП
о to to
CD СО
Изобретение относится к машиностроению и может быть использовано р захватных органах промьшшенных роботов-манипуляторов.
Целью изобретения является расширение технологических возможностей за счет возможности работы, например, в химически активных средах.
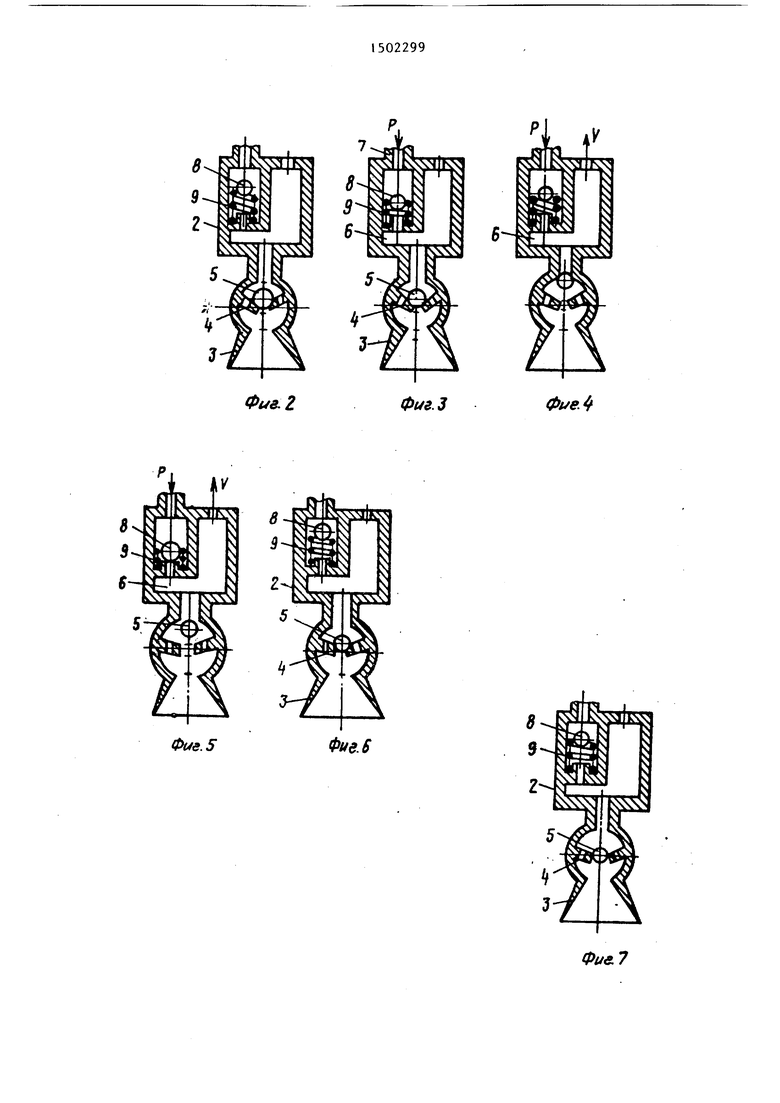
На фиг.1 представлен схват, общий вид; на фиг.2 - 11 - основные этапы цикла работы схвата.
Схват робота содержит корпус 1 , захватывающие элементы 2 с вакуумным присосками 3, установленные в них ос новные нормально открытые обратные клапаны, снабженные сеткой 4 и шариком 5, имеющим ограниченные из-за не перемещения. Кроме того, захватывающий элемент снабжен камерой 6 со шту цером 7, помещенным во внутрь корпуса схвата. В камере 6 расположен дополнительный нормально открытый обратный клапан с щариком 8, установленным на пружине 9. Штуцеры 7 соединены общим воздухопроводом 10. Схват работает следующим образом. Начальным положением являются позиции (фиг.2 и 7). Во время подхода схвата к детали (фиг.З и 3) через воздухопровод 10 в захватывающие элементы начинает подаваться воздух. Проходя через штуцер 7, воздух воздействует на шарик 8, расположенный на пружине 9. При зтом пружина несколько деформируется. Далее поток . воздуха призгимает шарик 5 к сетке 4, и проходя через нее, вырывается из захватывающего элемента 2, обдувая поверхность захватываемой детали.
После касания и легкого прижима захватывающюг элементов к поверхност дртали давление в корпусе падает из- за подключения к схвату вакуумного насоса. В случае захвата детали (фиг.9) шарик 5 располагается на сетке 4, а если захвата не произошло (фиг.З), то он поднимается под действием обратного потока воздуха, движущегося вовнутрь схвата, и закрывает отверстие, связывающее полость присоски с линией вакуума. При этом в обоих случаях пружина 9 полностью деформируется под действием на нее шарика 8, он закрывает отверстие в камере 6, перекрывая подачу возду
ха к детали. Шарик 8 закрывает отверстие, так как на него действуют одновременно дополняющие г.руг друга силовые факторы: от созданного давления в одной камере и разрежения в другой.
При работе вхолостую (фиг.4) прежде закрывается основной клапан, . а затем дополнительный клапан, расположенный в камере 6. После переноса детали на рабочую позицию (фиг.10) вакуумный насос отключается, что приводит к открытию дополнительного клапана под действием пружины. Отсоединение детали от захватывающего элемента осуществляется избыточным давлением воздуха, подаваемого через воздухопровод к захватывающему элементу. Если устройство работает вхолостую, то шарик 5 падает на сетку. Этап окончания цикла работы схвата показан на фиг.6 и 11 и полностью совпадает с первоначальным (фиг.2 и 7)..
I
При работе схвата в агрессивных . газах непосредственно перед захваток детали через трубопровод подается воздух, который, попадая в зону между схватом и захватываемой деталью, уменьшает }сонцентрацию вредных веществ. В момеит захвата детали в вакуумную систему попадает незначит- тельная .ч:асть агрессивных газов, ко торые присутствуют в воздухе в малой концентрации.
Формула изобретения
Схват робота, содержащий корпус с вакуумными присосками, в которых расположены основные нормально открытые обратные клапаны, через которые полости присосок связаны с источником разрежения соответствующей линией, отличаюп ий- с я тем, что, с целью расширения техг нологических возможностей, он снабжен дополнительными нормально открытыми обратными клапанами, через которые каждая линия разрежения связана с нсточником сжатого воздуха, причем дополнительный нормально открытый обратный клапан включен встречно по отношению к основному.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1985 |
|
SU1585149A1 |
| Вакуумный захват | 1988 |
|
SU1705068A1 |
| ЗАХВАТНАЯ ГОЛОВКА | 2003 |
|
RU2256549C2 |
| Вакуумный схват | 1980 |
|
SU891429A1 |
| ОЧУВСТВЛЕННЫЙ ВАКУУМНЫЙ ЗАХВАТ | 2005 |
|
RU2283751C1 |
| Вакуумный схват | 1989 |
|
SU1689066A1 |
| Схват манипулятора | 1984 |
|
SU1178588A1 |
| Вакуумный схват | 1983 |
|
SU1121133A2 |
| Захватное устройство | 1988 |
|
SU1549893A1 |
| Адаптивный вакуумный захват | 1991 |
|
SU1816690A1 |

Изобретение относится к машиностроению и может быть использовано в захватных органах промышленных роботов-манипуляторов. Цель изобретения - расширение технологических возможностей за счет возможности работы, например, в химически активных средах. Корпус 1 с вакуумными присосками 3, в которых расположены основные клапаны, снабжен дополнительными клапанами. При этом через основной клапан полость присоски связана с источником разрежения, а через дополнительный источник разрежения связан с источником сжатого воздуха. Во время подхода схвата к детали через воздухопровод 10 подается воздух, который, обдувая поверхность детали, уменьшает концентрацию вредных примесей. После касания присосками 3 поверхности детали подключается источник разрежения. При этом под действием потоков воздуха, образуемых источниками разрежения и сжатого воздуха, пружина 9 дополнительного клапана деформируется и шарик 8 перекрывает отверстие в камере 6. В полостях присосок создается разрежение и происходит захват детали. После переноса детали на рабочую позицию источник разрежения отключается и дополнительный клапан открывается под действием пружины 9. 11 ил.
Фиг. 2
Фие.5
Фае. 6
Фиг.З
.
Фие.7
Фие.8
фиг. 9
Фие.Ю
Фиб.П
| Вакуумный захват | 1980 |
|
SU946921A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
