I1
Изобретение относится к маяггиостроению, в частности к робототехнике, и может быть использовано для оснащения рук промышленных роботов.
Известна головка манипулятора, содержащая корпус, в котором размещенн схваты, механизм зажима, взаимодействующий с HfflviH, и привод
Недостатком известной головки являются узкие технологические возможное ти, так как она не предназначена для захватывания деталей сложной в сечении формы.
Цель изобретения - расширение технолгических возможностей. Цель достигается тем, что в головке манипулятора, содержащей.корпус, в котором размещены схваты, механизм зажима, взаимодействующий с ними, и привод, механизм зажима вьшолнен в виде . щтока с подпружиненными сухарями, расположенного в корпусе перпендикулярно схватам, причем схваты расположены в корпусе с возможностью взаимодействи с сухарями.
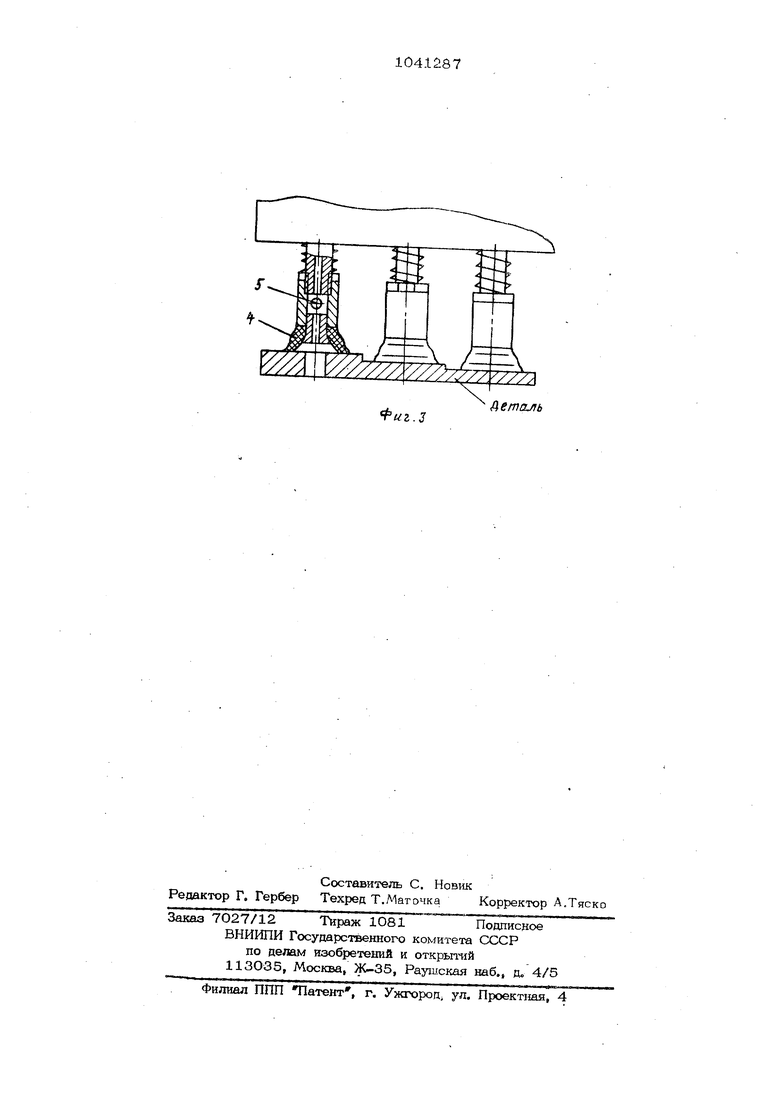
На фиг. 1 схематически изображен схват, продольный разрез; на фиг. 2 сечение А-А на фиг, 1; на фиг, 3 рабочее положение присосок.
Схват содержит корпус 1, ваку;умную камеру 2 с эжектором 3, присоскн 4 с клапанами 5 и зажимное устройство 6, встроенное в корпус 1 и cocTosmiee из пневмоцшпшдра 7, штоканлоршня 8 с
%%
усталовленными на нем лойиру еяньми сухарями 9. Присоски 4 и клапань-: кре-пятсй на подвижных стержзшх 10,, поджаЦзЕх; пружинами 11.
Схват работает следующ11М образом, В исходном положении схвата в рабо чую полость пневмопилиндра 7 зажи/шого устройства 6 подается сжатый воздух, шток-поршень с сухг.рями 9 перемещается вправо, освобождая стержни 10. Для захвата детали схват прижимается к ней. . Присоски 4 и стержзта 10 занимают положения, заданные конфигурапией схватывае мой детали. Затем в эжектор 3 подается сжатъш воздух, в B8J yyMHoft камере 2 со-- здается необходимое разрежение, обеспе-чивающее взятие детали. При попадании какой-либо присоски ш cic&oaitoe отверс me в дета,гш клалан 5 перекрывает канал в стержне 10, сохраняя необходимое разрежение в вакуугжой камере. Подается команда на зажим стержней, схват поп нимается и переносится на рабочую по-зицию, где деталь устанав,пивается в Н -Жное положение; подача воздуха на эжектор прекращается, деталь освобождается и цикл повторяется.
Применение данного вакуумного схвата для оснащения промьщ1лённого робота расатиряет его технологические возможности, способствует увеличению производительности ТРУД( снижению трудоемкости изделий.
А
«..2.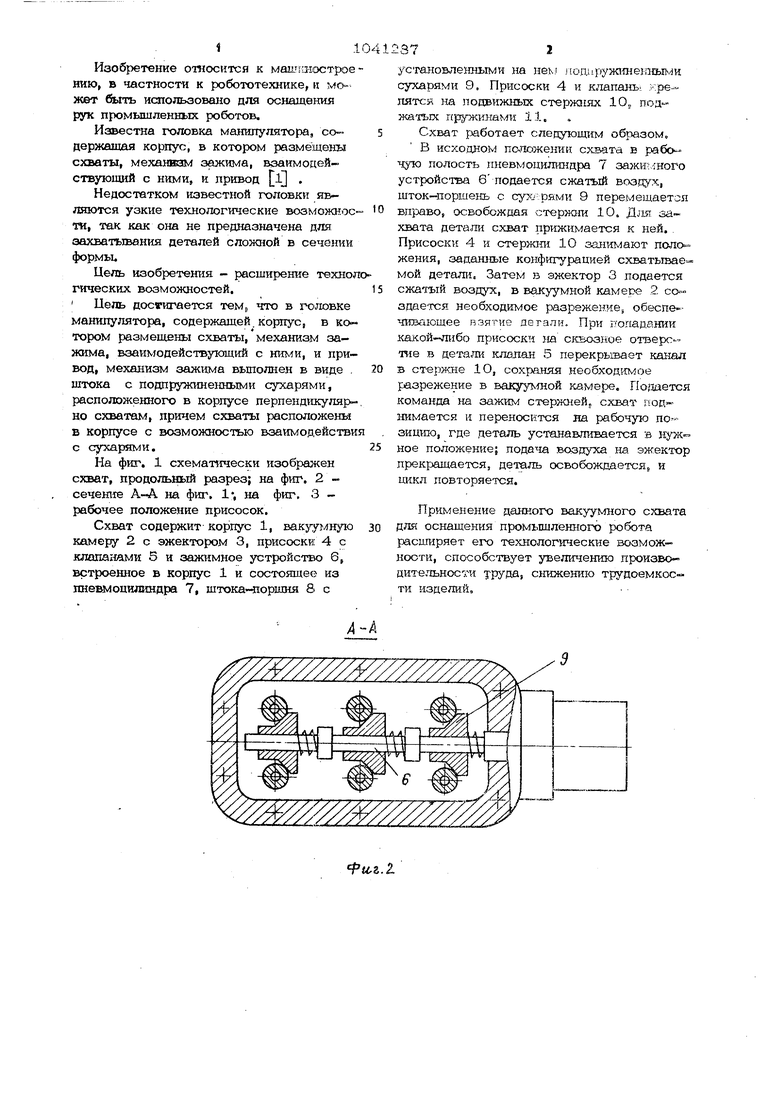
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумное захватное устройство | 1981 |
|
SU1036657A1 |
| Вакуумный схват | 1980 |
|
SU891429A1 |
| Схват манипулятора | 1985 |
|
SU1585149A1 |
| Головка манипулятора | 1990 |
|
SU1811485A3 |
| Исполнительный орган сборочного манипулятора | 1980 |
|
SU961939A1 |
| Вакуумный схват манипулятора | 1986 |
|
SU1421533A1 |
| Вакуумное захватное устройство | 1989 |
|
SU1815217A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Многопозиционный автомат для сборки узлов | 1990 |
|
SU1779530A1 |
| Схват робота | 1987 |
|
SU1502299A1 |
ГОЛОВКА МАНИПУЛЯТОРА, содержащая корпус, в котором размещены схваты, мехашазм зажима, взаимодействующий с ними, и привод, отличающаяся тем, что, с целью расширения технолопгческих возможностей, механизм зажима выполнен в виде штока с подпружиненными сухарями, расположенного в корпусе перпендик5лярно схватаМа причем послед11ие установлены с возможностью взаимодействия с сухарясми. 0/Г7 пнебмайаспредвлиглеля 1д От пнебмд распределителя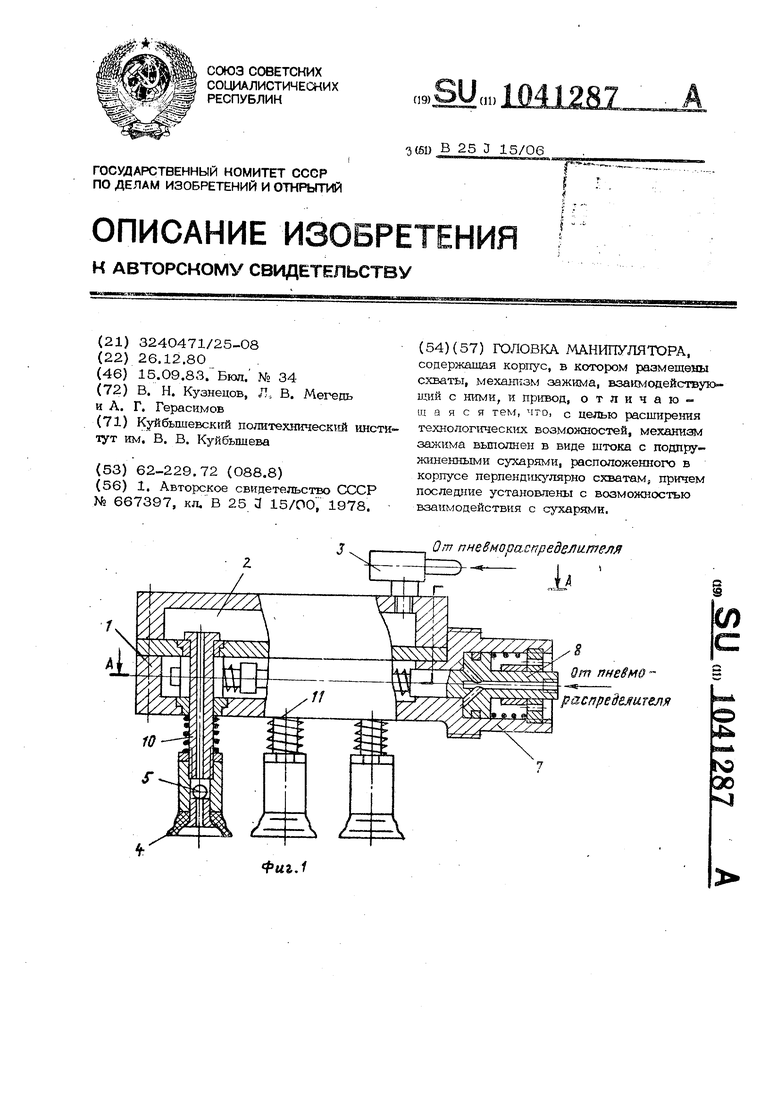
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захватная головка манипулятора | 1978 |
|
SU667397A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| fpui.l | |||
