Изобретение относится к весоизмерительной технике.
Цель изобретения - повышение точности
На чертеже показана схема, весового дозатора дискретного действия.
Дозатор содержит механизм 1 загрузки материала, бункер 2, в котором расположены рыхлители 3, пневмогенератор 4, преобразователь веса в пневматический сигнал в виде измерительной пружины 5, планки 6 и шарика 7, расположенного в конусе 8, приемник 9 взвешиваемой дозы, конус 10, механизм 11 выгрузки, узел 12 формирования закона досыпки, узел 13 управления загрузки и узел 14 управления выгрузкой, манометры 15 - 17.
Узел 12 формирования закона досыпки содержит первый задатчик 18, первый элемент 19 сравнения, первое реле 20, третий дроссель 21, второе реле 22, вторую пневмо- емкость 23, второй задатчик 24, второй элемент 25 сравнения, повторитель 26со сдвигом, второй дроссель 27.
Узел 13 управления загрузкой содержит третье реле 28, третий элемент 29 сравнения, повторитель 30, первый дроссель 31. первую пневмоемкость 32, четвертое реле 33, пятое реле 34.
Узел 14 управления выгрузкой.содержит шестое реле 35, кнопку 36, седьмое реле
О
XI
ю ю со
О
37, тумблер 38, восьмое реле 39, девятое репе 40 третью пневмоемкость 41, четвертый дроссель 42, десятое реле 43, пневмо- лампу 44.
В устройстйе имеются также дроссели 45 - 54, являющиеся ограничителями расхода воздуха.
Дозатор работает следующим образом.
При подаче управляющей команды от узла 13 на механизм 1 материал из бункера 2 поступает в приемник 9.
С помощью рыхлителей 3 материал в бункере 2 поддерживается в подвижном состоянии.
Набор дозы производится в двух режимах: в первом режиме производится набор примерно 90% дозы с возможно максимальной скоростью, а во втором режиме производится досыпка, которая ведется регулятором по пропорционально-интегрально-дифференциальному закону, но задание на него подаем л по экспоненциальному закону, начиная с момента перехода на этот режим.
Задатчиком 18 узла 12 устанавливается давление Pi, величина которого близка к нулю, но больше давления Р2, когда нет давления на шарик 7 от планки 6, т.е. когда переменное давление Р2 равно силе, компенсирующей вес шарика 7.
Этим условием обеспечивается переход на автоматическую досыпку при Ра Pi, т.е. при начале нажатия планки 6 на шарик 7, когда материал начинает поступать в приемник 9.
При этот срабатывает элемент 19 сравнения, выходное давление Рз которого в этом случае равно 1 (Рз 1) и поступает на реле 28, переводящее механизм 1 на автоматическую работу, и на реле 20, закрывающее сброс давления после дросселя 27. С задержкой времени, определяемой дросселем 21, срабатывает реле 22, а пневмоемкость 23 получает питание через дроссель 27.
При этом в момент переключения за счет большой скорости подачи материала из бункера 2 в приемник 9 величина давления Р2 может принимать неопределенное значение, т.е. Р2 Рт, где Р - давление в линии после дросселя 27 (вход рел&22).
Для того, чтобы давление Р было больше или равно давлению Ра(Р 5: Ра) необходимо время, в течение которого досыпка материала остановлена, а Р растет по экспоненте.
Какое бы значение не принимало давление Ра реле 22 обеспечивает переключение
на рост его по экспоненциальному закону, начиная с равенства этих давлений (Ра Р).
Задатчиком 24 устанавливается величина давления Ре.
Давление Ре поступает на элемент 25 сравнения, где сравнивается с давлением Ра.
При Pa S Ре на выходе элемента 25
0 сравнения давление равно единице (Ps 1). Это давление как сигнал управления поступает на реле 34, отключающее механизм 1, на реле 35, разрешающее от кнопки 36 сброс отвешенной порции, на реле 39, уп5 равляющее сбросом в автоматическом режиме, и на пневмолампу 44, сигнализирующую о готовности порции к выгрузке.
Кроме того, давление Ре через дроссель
0 27 в виде давления Р поступает на повторитель 26 со сдвигом.
Давление с выхода повторителя 26 со сдвигом поступает в качестве задания на элемент 29 сравнения, выполняющий роль
5 регулятора. Повторитель 26 со сдвигом за счет сдвига Рз Ра при Р 0 обеспечивает Рп 0 (сигнал выключения механизма 1) в начале перехода на автоматическую досыпку и РА (Р + Рсдвига) Ре, но Ре ,
0 чем обеспечивается надежная работа элемента 25 сравнения.
Дроссель 27 и пневмоемкость 23 обеспечивают рост давления Р по экспоненциальному закону, начиная от достигнутого
5 значения давления (Р Ра), причем форма экспоненты определяется экспериментально.
На элемент 29 сравнения узла 13 поступает давление задания РА (изменяющееся
0 по экспоненте) и переменное давление Ра, пропорциональное весу сдозированного материала.
Закон регулирования (пропорциональный или пропорционально-интегрально5 дифференциальный) устанавливается при наладке с помощью дросселя 31.
Сигнал управления Рю с выхода элемента 29 сравнения, выполняющего роль регулятора, через повторитель 30, реле 28,
0 33 и 34 поступает на механизм 1 подачи материала.
Реле 28 переключает питание механизма 1 от сети на элемент 29 сравнения, реле 34 запрещает подачу материала, если давле5 ние Ра достигло заданного значения, а реле 33, если идет выгрузка из приемника 9.
Узел 14 управления выгрузкой работает следующим образом. Сигнал о наборе дозы PS поступает с элемента 25 сравнения узла
12. Если тумблер 38 установлен на ручной режим, то сигнал готовности к выгрузке подается пневмолампой 44. При этом срабатывает реле 35 и при нажатии кнопки 36 пневмосигнал через реле 35 и 37 поступает на реле 40, выходной сигнал которого обуславливает срабатывание реле 43.
Выходной сигнал реле 43 воздействует на механизм 11 выгрузки. Выгрузка продолжается до тех пор, пока не сработает меха- низм контроля (не показан). Возможна настройка времени выгрузки настройкой дросселя 42 в зависимости от свойств матери чл а.
Формулаизобретения
Весовой дозатор дискретного действия, содержащий бункер с механизмом загрузки материала в приемник, механизмом выгрузки, преобразователь веса в пневматический сигнал, кинематически соединенный с при- емником, и узел управления загрузкой с повторителем, первой пневмоемкостью и первым дросселем, подключенный к механизмам загрузки и выгрузки, отличающийся тем, что, с целью повышения точно- сти, в него введен узел формирования закона досылки, выполненный в виде первого и второго реле, повторителя со сдвигом, первого и второго элементов сравнения, второго и третьего дросселей и второй гневмоемкости. в узел управления загрузкой введены третье, четвертое и пятое реле и третий элемент сравнения, и введен узел управления выгрузкой, выполненный в виде шестого, седьмого, восьмого, девятого и де- сятого реле, пневмолампы, тумблера и кнопки, причем первый зэдатчик подключен к одному входу первого элемента сравнения, к другому входу которого подключен преобразователь веса в пневматический сигнал, выход первого элемента сравнения подключен к первым входам первого, второго и третьего реле, второй задатчик подключен к первому входу второго элемента сравнения и через второй дроссель - к вторым входам первого и второго реле (и входу повторителя со сдвигом, вторая пневмоем- кость подключена к третьему входу второго реле, второй вход второго элемента сравнения, первый вход третьего элемента сравнения и третий вход второго реле подключены к преобразователю веса в пневматический сигнал, второй вход третьего элемента сравнения подключен к выходу повторителя со сдвигом, а выход через повторитель к входу третьего реле, выход которого и выходы четвертого и пятого реле подключены к механизму загрузки, вход четвертого реле подключен к механизму выгрузки, вход пятого реле соединен с выходом второго элемента сравнения, четвертое и пятое реле соединены между собой, первый входы шестого и восьмого реле и пневмолампа подключены к выходу второго элемента сравнения, кнопка подключена к второму входу шестого реле, выход которого подключен к первому входу седьмого реле, к второму входу которого подключен выход восьмого реле, а к третьему входу - тумблер, выход седьмого реле подключен к входу девятого реле, выход которого через десятое реле подключен к механизму выгрузки, а третий и четвертый входы третьего элемента сравнения соединены между собой и через первый дроссель и первую пневмоемкость связаны с его пятым входом.
24 Ц V 17 5320 15 Я 51 26 }в
50
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКИЙ ВЕСОВОЙ ДОЗАТОР | 1992 |
|
RU2069321C1 |
| КОМПЛЕКСНАЯ ЛИНИЯ ДЛЯ ПРОИЗВОДСТВА ПОРОШКА САЛЬБУТАМОЛА 2%, РАСФАСОВКИ ЕГО В ПЛАСТМАССОВЫЕ ФЛАКОНЫ И ИХ ЗАКУПОРКИ | 1992 |
|
RU2108946C1 |
| Весовой порционный дозатор с устройством управления | 1980 |
|
SU1237914A1 |
| Устройство для регулирования процесса улавливания и накопления органического слоя в емкости с сифоном | 1986 |
|
SU1327055A1 |
| ПНЕВМАТИЧЕСКИЙ ДВУХКАНАЛЬНЫЙ ОПТИМИЗАТОР | 1972 |
|
SU419849A1 |
| Пневматический генератор | 1984 |
|
SU1234671A2 |
| Пробоотборник | 1981 |
|
SU987447A2 |
| ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПОСТРОЕНИЯ АВТОКОЛЕБАТЕЛЬНЫХ САМОНАСТРАИВАЮЩИХСЯ СИСТЕМ | 1992 |
|
RU2032925C1 |
| Пневматический двухканальный оптимизатор | 1974 |
|
SU526858A1 |
| Пневматический регулятор | 1982 |
|
SU1040466A1 |
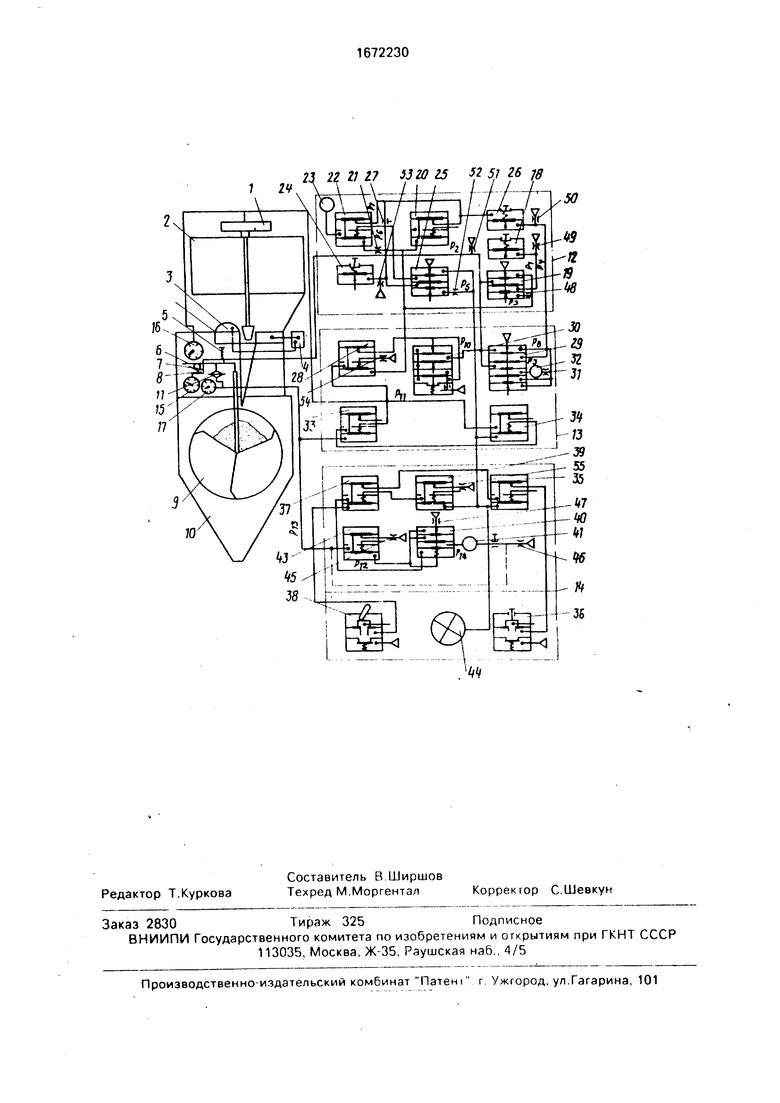
Изобретение относится к весоизмерительной технике и позволяет повысить точность. В зависимости от веса сдозированного в приемник 9 из бункера 2 материала изменяется давление в пневмолинии, соединяющей преобразователь веса в виде измерительной пружины 5, планки 6 и шарика 7, расположенного в конусе 8, с узлом 12 формирования закона досыпки и узлом 13 управления загрузкой. Узел 14 управления выгрузкой пневмолинией соединен с механизмом 11 выгрузки. На элемент 29 сравнения узла 13, выполняющего роль регулятора, поступает давление задания, изменяющееся по экспоненте, и переменное давление от преобразователя веса. Закон регулирования устанавливается с помощью дросселя 31. Пневмосигнал с выхода элемента 29 сравнения через повторитель 30, реле 28, 33 и 34 поступает на механизм 1 подачи материала. Сигнал о наборе дозы вырабатывается на выходе элемента 25 сравнения узла 12 и поступает на пневмолампу 44. 1 ил.
| Устройство управления дозатором | 1986 |
|
SU1357721A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство управления весовым порционным дозатором | 1973 |
|
SU477312A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
