Изобретение относится к приборЬстроению, а именно к устройствам накопления, информации, и может быть использовано для управления скоростью перемещения носителя магнитной эаписи.
Известно устройство, содержащее синхронный двигатель, с которым кинематически связан датчик положения ротораJ соединенньй с сумматором, .второй вход которого соединен с силовым мостом, питающим двигатель, а выход - с вЙЙдом широтно-импульсного модулятора, который соединен с силовым мостом на время разгона двигателя до номинальной скорости при помощи переключателя, управляемого сигналом частотно-фазового компаратора, сравнивающего сигналы датчика положения ротора и задающего генератора, По достижении номинальной скорости переключатель подключает вход силового моста к задающему генератору, переводя синхронный двигатель в синхронный режим Щ
Недостатками данного устройства являются отрутствие возможности переключения скорости; наличие изменения .скорости и фазы вследствие изменения момента нагрузки и флуктуации момента двигателя; отсутствие режима реверса; отсутствие возможности быстрого торможения- двигателя.
Известно также устройство для управления скоростью перемещения носителя магнитной записи, содержащее задающий генератор, выход которого соединен с первыми входами первого и второго управляемых делителей частоты, вторые входы этих делителей соединены с шиной управления и с первым входом силового моста, связанного с синхронным двигателем, соединенным кинематически с датчиком положения ротора, первый выход первого управляемого делителя частоты соединен с первым входом корректора, второй вход последнего соединен с первым выходом частотно-фазового дискриминатора, второй выход которого соединен с первым входом коммутатора, второй вход которого соединен с выходом корректора, первый вход частотнофазового дискриминатора соединен с выходом второго управляемого делителя частоты |2J .
Недостатками этого устройства . являются отсутствие режима реверса;
большое время торможения, так как двигатель носителя останавливается лишь за счет потерь энергии на трение. Кроме того, использование дат-, чика положения ротора в качестве датчика скорости и фазы может приводить к неустойчивому переходу из режима вентильного двигателя в режим синхронного двигателя и не позволяет получить большую стабильность скорости вращения ввиду невысокой частоты съема информации с датчика положения ротора.
Цель изобретения - расширение функциональных возможностей устройства и повышение точности.
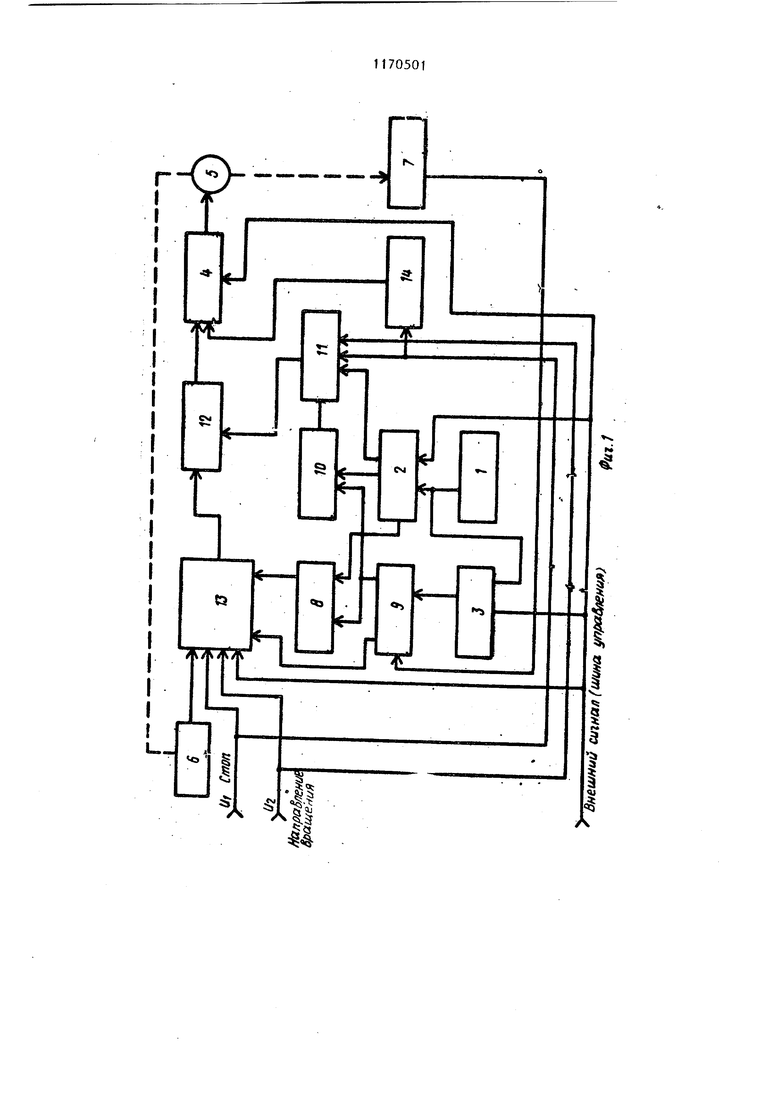
Поставленная цель достигается тем что в устройство для управления скоростью перемещения носителя информации, содержащее задающий генератор, выход которого соединен с первыми входами первого и второго управляе 1ых делителей частоты, вторые входы этих делителей соединены с шиной управления и с первым входом силового моста, связанного с синхронным . двигателем, соединенным кинематически с датчиком положения ротора, первый выход первого управляемого делителя частоты соединен с первым входом корректора, второй вход последнего соединен с первым выходом частотно-фазового дискриминатора, второй выход которого соединен с первым входом коммутатора, второй вход которого соединен с выходом корректора, первьй вход частотно-фазового дискриминатора соединен с выходом второго управляемого делителя частоты, введены переключатель фаз, дополнительный коммутатор, формирователь коротких импульсов, элемент задержки и датчик скорости, кинематически соединенный с синхронным двигателем, причем выход датчика скорости соединен с вторым входом частотно-фазового дискриминатора, первый выход которого соединен с первым входом формирователя коротких импульсов, а его второй .вход соединен с вторым выходом первого управляемого делителя частоты, третий выход этого делителя соединен с первым входом дополнительного коммутатора, второй вход которого соединен с выходом формирователя коротких импульсов, а третий вход соединен с третьим входом коммутатора, четвертый его вход соединен с чет3|вертым входом дополнительного коммутатора и с входом элемента задержки, выход которого соединен с вторым входом силового моста, третий вход этого,моста соединен с выходом переключателя фаз, первый и второй входы переключателя фаз соединены соответственно с выходами основного и дополнительного коммутаторов, пятый вход коммутатора соединен с выходом датчика положения ротора, а его шестой вход - с шиной управления, причем второй и третий входы коммутатора являются входами устройства. На фиг. t приведена структурная схема устройства; на фиг. 2 - времен ные диаграммы, поясняющие его работу Устройство содержит задающий генератор 1, выход которого соединен с первыми входами первого 2 и второго 3 управляемых делителей частоты, вторые входы которых соединены с шиной управления и с первым входом силового моста 4, питающего двигатель 5, который кинематически связан с датчиком 6 положения ротора и с датчиком 7 скорости. Первый выход первого управляемого делителя 2 частоты соединен с первым входом коррек тора 8. Второй вход корректора 8 соединен с первьм выходом частотнофазового дискриминатора 9 и с первым входом форшгрователя 10 коротких импульсов, второй вход которого соединен с вторым выходом первого управляемого Делителя 2 частоты, третий выход которого соединен с первым 1ВХОДОМ дополнительного коммутато- ра 11, выход которого соединен с пер вым входом переключателя 12 фаз, 1ВТОРОЙ вход которого соединен с вуходом коммутатора 13, первый вход этого коммутатора соединен с вто:рым выходом частотно-фазового дискри 1 шнaтopa 9, а шестой вход - с вторым входом первого управляемого делителя 2 частоты, первьй вход дискри I минатора 9 соединен с выходом второго управляемого делителя 3 частоты, а второй вход - с выходом датчика 7 скорости. Второй вход коммутатора 13 соединен с выходом корректора 8, , выход формирователя 10 соединен 1 с вторым входом дополнительного коммутатора 11, третий вход которого соединен с третьим входом коммутатора 13, четвертый вход этого коммута.тора соединен с шиной Стоп, чет014. вертым входом дополнительного ком- мутатора 11 и с выходом элемента 14 задержки, выход которого соединен с вторым входом силового моста 4. Третий вход силового моста 4 соединен с выходом переключателя 12 фаз. Выход датчика 6 положения ротора соединен с пятым входом коммутатора 13. Устройство работает следующим образом. Импульсом на шине управления ко мутатор 13 (фиг. 1) коммутирует на свой выход сигналы с датчика 6 положения ротора. Ключи силового моста 4 переключаются сигналами с датчика 6 положения ротора, т.е. двигатель 5 работает в режиме вентильного двигателя. На шине управления устанавливается напряжение, которое обеспечивает питаниесилового моста 4 в соответствии с заданной номинальной скоростью. Сигналом по этой же шине устанавливаются коэффициенты делителей 2 и 3 частоты, соответствующие данной номинальной скорости. Если скорость двигателя 5 превышает номинальную, сигналом с частотнофазового дискриминатора 9 разрешается прохождение импульсов с выхода формирователя 10 на вход дополнительного коммутатора 11 для уменьшения напряжения, питающего двигатель 5 (релейный закон управления). - Скорость двигателя 5 стабилизируется для того, чтобы в момент равенства фаз сигнала с датчика скорости 7 и сигнала с выхода второго делителя 3 частоты, соответствующий значению данной номинальной скорости, двигатель 5 плавно вошел в синхронньй режим. В этом реяиме сигналом с выхода частотно-фазового дискриминатора 9 коммутатор 13 устанавливается в положение, при котором ключи силового моста 4 управляются сигналами, модулируемыми по заднему фронту сигнала корректора 8. В этом режиме происходит стабилизация скорости и фазы движения ротора двигателя 5. Изменение направления вращения двигателя 5 происходит в режиме вентильного двигателя, который устанавливается по сигналу коммутатора 13. На выходе дополнительного коммутатора 11 при этом присутствует сигнал с выхода формирователя 10 (фиг. 2), кото рый управляет работой переключатет
ля 12 фаэ следующим образом, Если сигнал на выходе дополнительного коммутатора 11 равен 1, то ключи силового моста 4 управляются сигналами с датчика положения ротора, и развиваемый двигателем момент положителен. В случае, если сигнал на выходе коммутатора 11 равен О, то ключи силового моста 4 переключаются инверсными сигналами датчика положения ротораj т.е. двигатель 5 развивает отрицательный момент. Таким образом, на интервале дискретности Т (фиг. 2) двигатель 5 развивает положительный и отрицательный моменты, а сум трный момент положителен при ,.,
При реверсе направления вращения ,на вход переключателя 12 фаз через дополнительный коммутатор 11 посту; тгает инверсный сигнал с выхода форми:рователя 10. В этом случае суммарный
момент отрицателен. При появлении 5 сигнала Стоп (О) двигатель 5 переходит в режим вентильного двигателя, на выход дополнительного коммутатора 11 проходит сигнал типа меандр с третьего выхода управляемого делителя частоты 2. Через время, необходимое для полного останова двигателя 5, элемент 14 задержки выдает сигнал (фиг. 2), который блокирует ключи силового моста 4,
5 обесточивая тем самым двигатель 5. Применение изобретения в прецизионном лентопротяжном механизме позволяет получить малое время торможения, двухсторонний рабочий ход
0 при высокой точности поддержания скорости протяжки носителя.
. « „|-,l on |- Mlh

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления скоростью перемещения носителя информации | 1985 |
|
SU1278961A2 |
| Устройство для установки и стабилизации фазового положения блока вращающихся головок | 1986 |
|
SU1515195A1 |
| Стабилизированный бесконтактный двигатель с комбинированным управлением | 1987 |
|
SU1522355A1 |
| Устройство для управления скоростью перемещения магнитного носителя | 1983 |
|
SU1089621A1 |
| Устройство для стабилизации скорости и фазы вращения ротора электродвигателя постоянного тока | 1979 |
|
SU921012A1 |
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей постоянного тока | 1983 |
|
SU1100700A1 |
| Устройство для управления вентильным электродвигателем | 1982 |
|
SU1053232A2 |
| Электропривод постоянного тока | 1981 |
|
SU995247A1 |
| Устройство для управления вентильнымэлЕКТРОдВигАТЕлЕМ | 1979 |
|
SU843121A1 |
| Устройство для управления статическим преобразователем частоты | 1982 |
|
SU1125731A1 |

УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ ПЕРЕМЕЩЕНИЯ Н(Х;ИТЕЛЯ ИНФОРМАЦИИ, содержащее задакяций генератор, выход которого соединен с первыми входами первого и второго управляе,мых делителей частоты, вторые входы этих делителей соединены с шиной управления и с первым входом силового моста, связанного с синхронным двигателем, соединенным кинематически с датчиком- положения ротора, первый выход первого управляемого делителя частоты соединен с первым входом корректора, второй вход последнего соединен с первым выходом частотнофазового дискриминатора, второй выход которого - с первым входом коммутатора,- второй вход которого соединен с выходом корректора, первый BXO;J частотно-фазового дискриминатора соединен с выходом второго управляемого делителя частоты, отличающее ;С я тем, что, с целью расширения функциональных возможностей устройства и повышения точности, в него введены переключатель фаз, дополнительный коммутатор, формирователь корот-. ких импульсов, элемент задержки и датчик скорости, кинематически соединенный с синхронным двигателем, причем выход датчика скорости соединен с вторым входом частотно-фазового дискриминатора, первый выход которого соединен с первым входом формирователя коротких импульсов, а его второй вход - с вторым выходом первого управляемого делителя частоты, третий выход этого делителя соединен с первым входом дополнительного коммуW татора, второй вход которого соединен с выходом формирователя коротких импульсов, а третий вход - с третьим входом коммутатора, четвертый его вход соединен с четвертым входом дополнительного коммутатора и с входом элемента задержки, выход которого соединен с вторым входом силового О моста, третий вход этого моста соединен с выходом переключателя фаз, перел вый и второй входы пере1слючателя фаз соединены соответственно с выходами основного и дополнительного комМута;торов, пятый вход коммутатора соединен с выходом датчика положения ротора, а его шестой вход - с шиной управг ления, причем второй и третий входы коммутатора являются входами устройства.
CM
Й
j:;
CVJ
/ k f7f7 f
I
o
Ǥ
/x -A||
II
r
4J
4J
П5
-Vj
.
сч «
:5
:§
:
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3706923, | |||
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 3573606/18-10, кл | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| ; | |||
