Изобретение относится к механизации сельского хозяйства, а именно к автоматизации полевых работ.
Цель изобретения - повышение качества автоматического регулирования глу- бины хода рабочих органов машины.
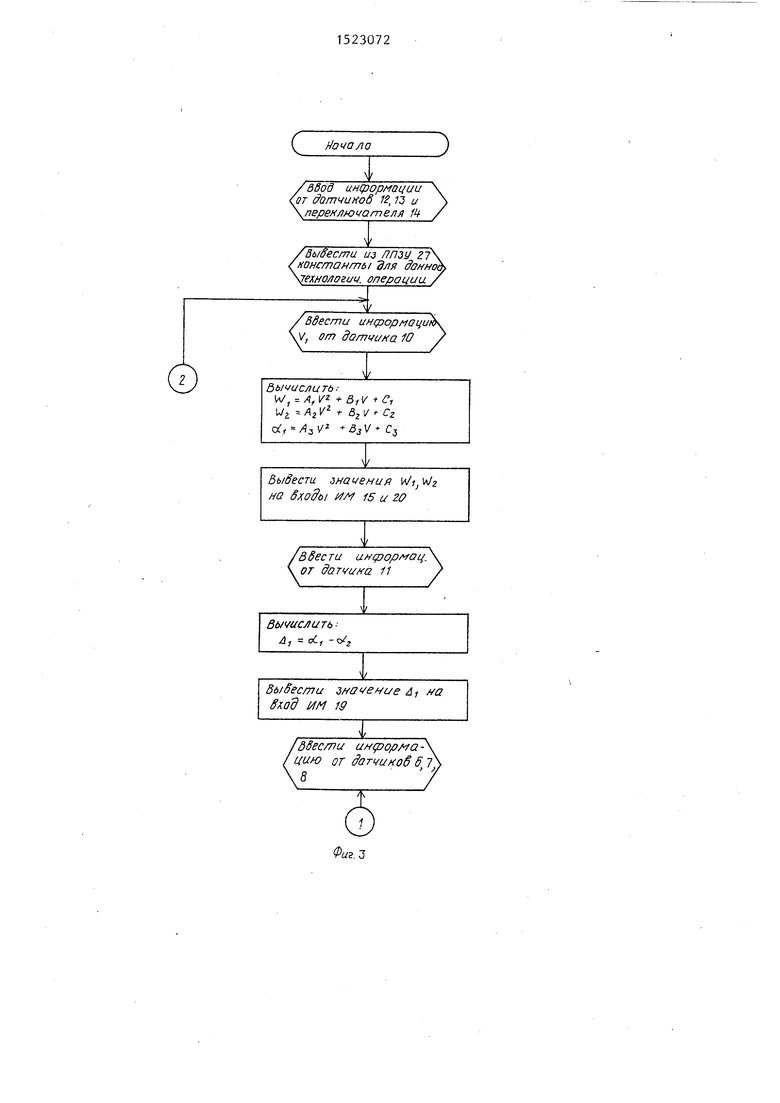
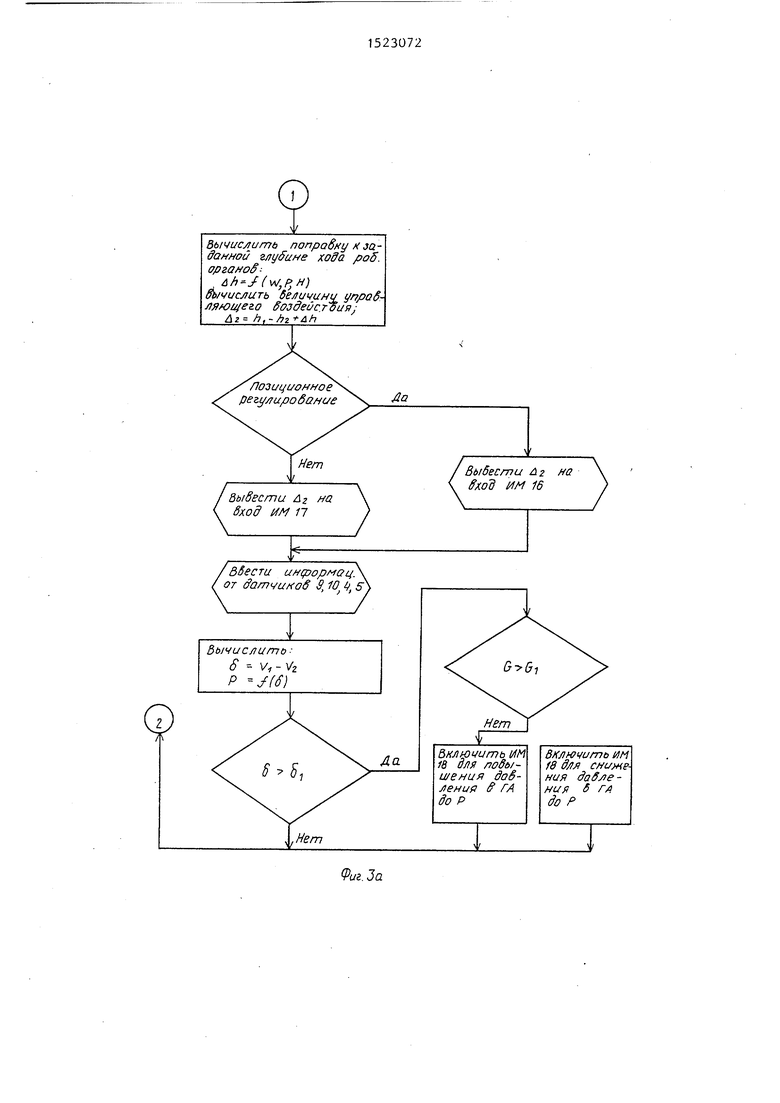
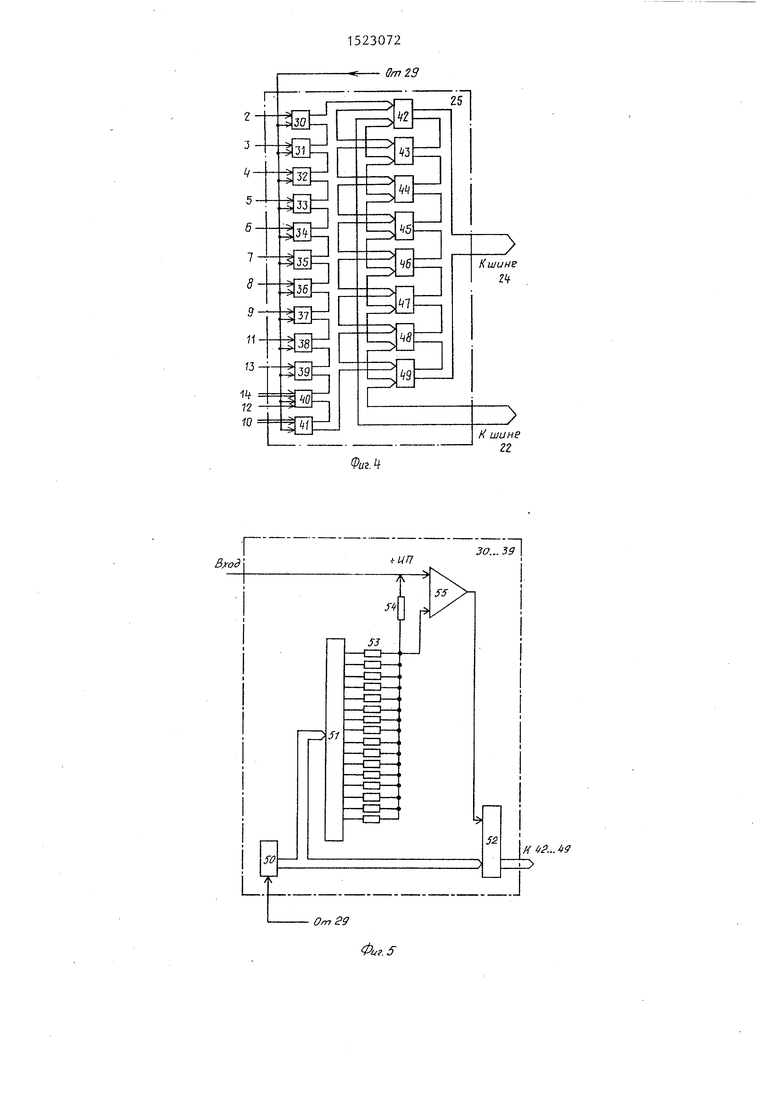
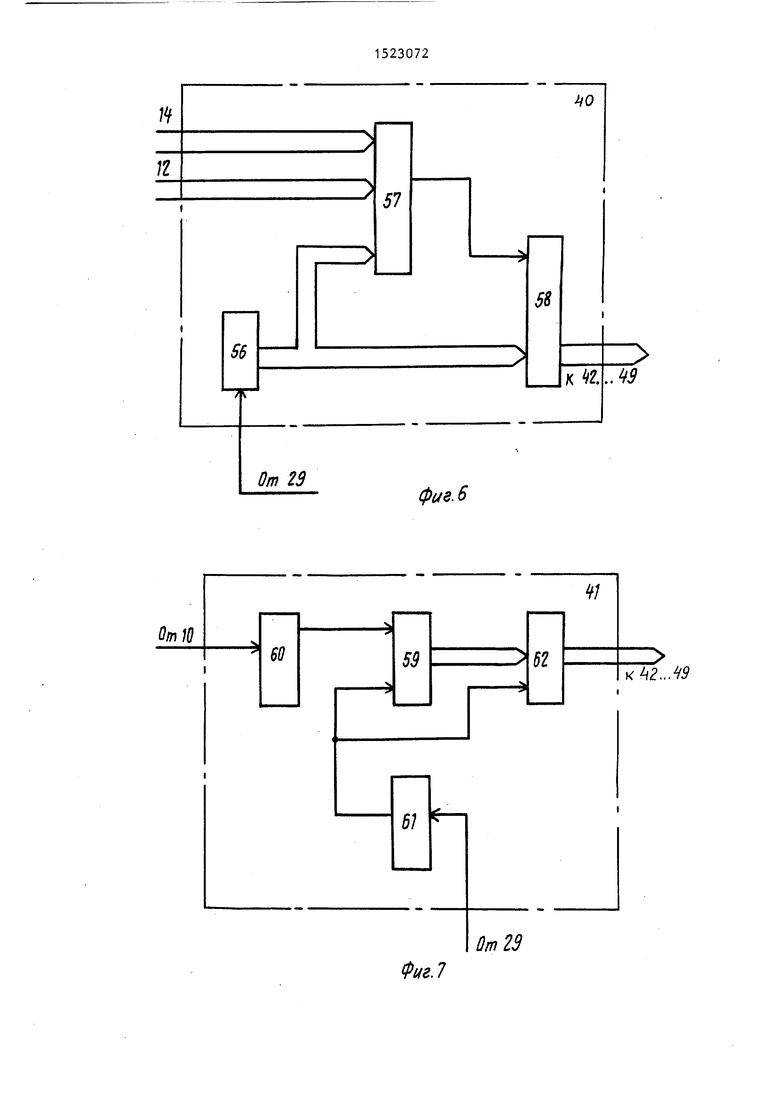
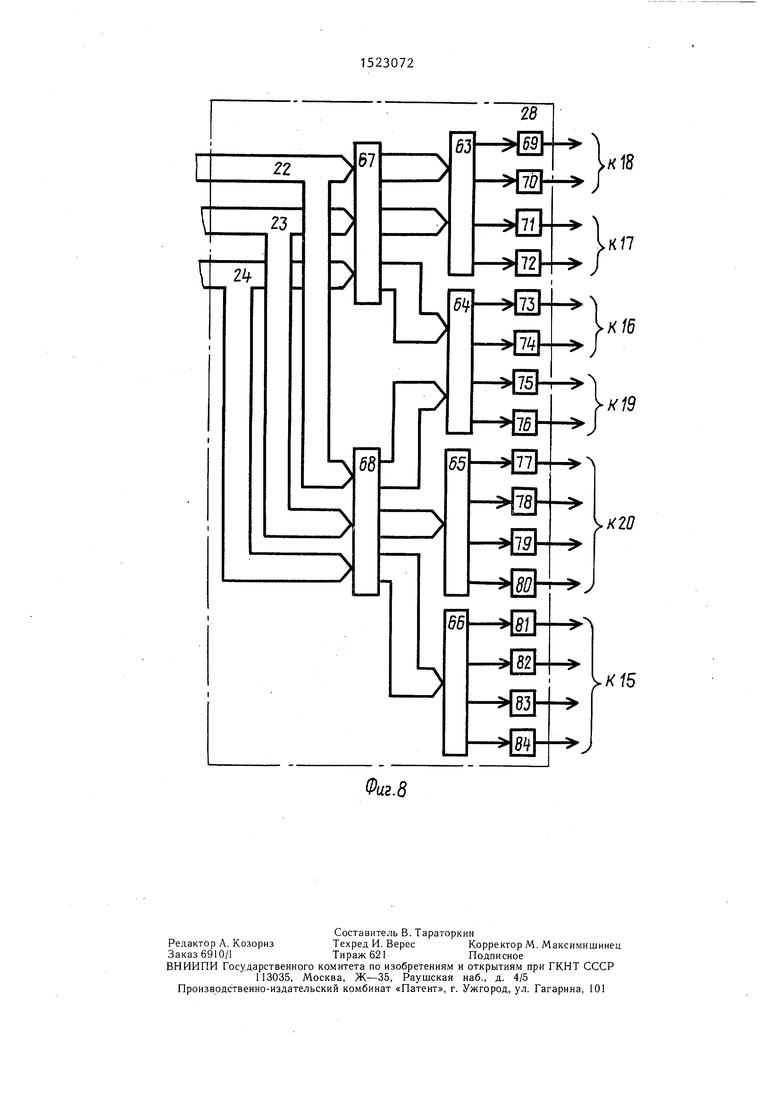
На фиг. 1 изображена блок-схема устройства; на фиг. 2 - блок-схема электронного управляющего блока 1; на фиг. 3 и За - блок-схемы алгоритма управляющей програм- мы; на фиг. 4 - блок-схема устройства ввода информации от датчиков; на фиг. 5 - блок-схема аналого-цифрового преобразователя; на фиг. 6 -- блок-схема дискретно-цифрового преобразователя; на фиг. 7 - блок-схема импульсно-цифрового преобразо- вателя; на фиг. 8 - блок-схема устройства вывода управляющих сигналов.
Устройство для автоматич еского регули- рвания глубины хода рабочих органов содержит электронный управляющий блок 1, входами связанный с датчиками глубины хода рабочих органов 2 положения поворотного вала навесного механизма 3, давления в гидроаккумуляторе 4, нагрузки на ось направляющих колес 5, влажности почвы 6, твердости почвы 7, толщины пахот- ного слоя 8, действительной скорости агрегата 9, теоретической скорости агрегата 10 положения платформы датчиков 11, а также с задатчиками способов регулирвания 12 и глубины хода рабочих органов 13, переключателем 14 режимов управления. Выходами. электронный блок 1 связан с регулятором 15 интенсивности управляющего воздействия и с исполнительным механизмом 16 позиционного регулирования, исполнительным механизмом 17 высотного регулирования, исполнительным механизмом 18 дог- рузки ведущих колес агрегата, причем регулятор 15 интенсивности управляющего воздействия своим гидравлическим входом связан с гидросистемой трактора, а выходом - с исполнительными механизмами позиционного 16 и высотного 17 регулирования и догрузки ведущих колес 18. Другими выходами электронный блок 1 связан с исполнительным механизмом 19 изменения продольного выноса точки контакта датчиков с почвой и с другим регулятором 20 интенсивности управляющего воздействия, гидравлическим входом, связанным с гидросистемой трактора, а выходом- с исполнительным механизмом 19 изменения продольного выноса точки контакта
датчиков с почвой, причем последний кинематически связан с шарнирной платформой (не показаны), на которой расположены датчики глубины хода рабочих органов 2, влажности почвы 6, толщины пахотного слоя 8 и действительной скорости 9.
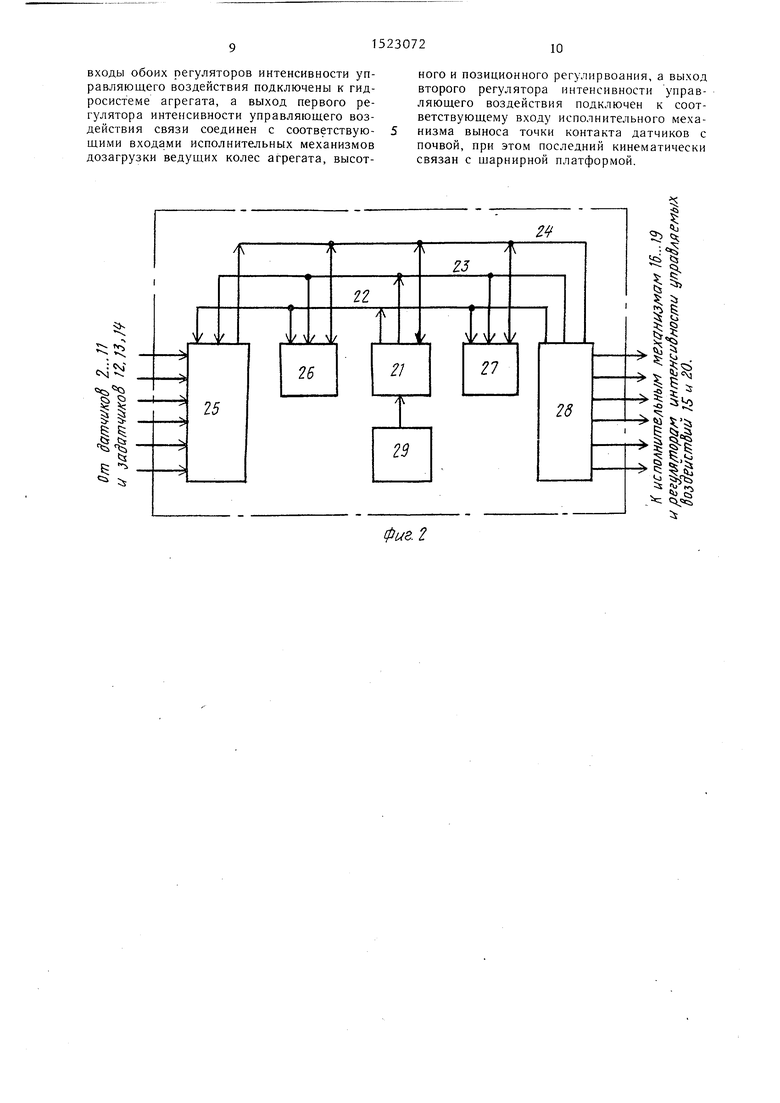
Электронный управляющий блок 1 содержит микропроцессор 21, щинами адреса 22, управления 23, данных 24, связанный с устройством 25 ввода информации от дат
5 0 5 0 5
0
г
чиков 2-11 и задатчиков 12-14, оперативным запоминающим устройством 26, перепрограммируемым постоянным запоминающим устройством 27 и устройством 28 вывода управляющих сигналов на входы исполнительных механизмов 16-19 и регуляторов 15 и 20 интенсивности управляющих сигналов и тактовый генератор 29, связанный со служебным входом микропроцессора 21.
Устройство 25 ввода информации от датчиков содержит аналого-цифровые преобразователи 30-39, дискретно-цифровой преобразователь 40, импульсно-цифровой преобразователь 41, информационными входами связанные с датчиками глубины хода рабочих органов 2, положения поворотного вала навесного механизма трактора 3, давления в гидроаккумуляторе 4, нагрузки на ось направляющих колес 5, влажности почвы 6, твердости почвы 7, толщины пахотного горизонта 8, действительной скорости 9 и положения платформы датчиков 11 и с задатчиком 13 глубины хода рабочих органов.
Устройство 25 ввода информации от датчиков содержит также дискретно-цифровой преобразователь 40, информационными входами связанный с переключателем 14 режимов управления и задатчиком 12 способов регулирования, а также импульсно- цифровой преобразователь 41, информационный вход которого связан с датчиком 10 теоретической скорости.
Синхронизирующие входы аналого-цифровых преобразователей 30-39, дискретно-цифрового преобразователя 40 и импульсно- цифрового преобразователя 41 связаны между собой и с тактовым генератором 29, а выходы - с информационными входами селекторов-мультиплексоров 42-49, Управляющие входы селекторов-мультиплексоров 42-49 соединены между собой и с щиной 22 адреса, а выходы - с щиной 24 данных.
Аналого-цифровые преобразователи 30- 39 содержат (каждый) счетчики 50 импульсов, входами связанные с тактовым генератором 29, а выходами - с входами дещифраторов 51 и буферных регистров 52. Выходы дешифраторов 51 соединены с магазинами резисторов 53, которые совместно с резисторами 54 составляют управляемый делитель напряжения, подключенный к первому входу компаратора 55. Другие входы компараторов 55 соединены с выходами информационных датчиков 2-9, И, 13, а выходы - со стробирующим ВХ9ДОМ буферного регистра 52. Выходы буферных регистров 52 соединены с информационными входами селекторов-мультиплексоров 42-49.
Дискретно-цифровой преобразователь 40 содержит счетчик 56 импульсов, входом связанный с тактовым генератором 29, а
выходами - с управляющими входами селектора-мультиплексора 57 и информационными входами буферного регистра 58. Информационные входы селектора-мультиплексора 57 соединены с переключателем 14 режимов управления и задатчиком 12, способов регулирования, а выход - со стро- бирующим входом буферного регистра 58. Импульсно-цифровой преобразователь 41 содержит счетчик 59 импульсов, к инфор- мационному входу которого через триггер Шмитта 60 подключен датчик 10 теоретической скорости, к стробирующему входу через делитель частоты 61 подключен тактовый генератор 29, а к выходу - информационный вход буферного регистра 62. Стробирующий вход буферного регистра 62 подключен к выходу делителя 61 частоты, а выходы - к информационным входам селекторов-мультиплексоров 42-49. Устройство 28 вывода управляющих сигналов содержит буферные регистры 63-66, к входам которых выходами подключены параллельные интерфейсы 67 и 68, входами соединенные с шинами адреса 22, управления 23 и данных 24, а к выходам - транзисторные ключи 69-84, соединенные с исполнительными механизмами 16-19 и регуляторами 15 и 20 интенсивности управляющих воздействий.
На фиг. 3 и За приняты обозначения: Wi - интенсивность управляющего воздействия при регулировании поло- жения рабочих органов; Wv - интенсивность управляющего воздействия при регулировании положения платформы датчиков; а. - расчетное положение платформы
датчиков;
ДЬ - поправка к заданной глубине
хода рабочих органов; hi - заданная глубина; h 2 - сигнал от датчика 2 глубины
.хода рабочих органов;
6| - допустимое буксование ведущих
колес трактора;
Vi - теоретическая скорость от датчика 10;
/2 -- фактическая скорость от датчика 9; а.-2- положение платформы датчиков
(сигнал от датчика 11); G - нагрузка на ось ведущих колес от датчика 5; GI -пороговое значение нагрузки на
ось ведущих колес (опреде- ляется маркой трактора и агро- фоном);
Р - давление в гидроаккумуляторе. Устройство работает следующим образом. Водитель посредством специального тумблера на панели электронного блока 1 (не. показан) включает питание от бортовой электрической сети трактора за 5-7 мин до начала работы. Затем посредс
5 .Q 15 25
0
35
.Q
45
0
5
вом задатчика способа регулирования 12 выбирает позиционное или высотное регулирование. Посредством переключателя f4 режимов управления выбирает режим, соответствующий наименованию технологической операции (пахота, культивация, посев, междурядная обработка и т. д.). При этом задатчик глубины хода рабочих органов 13 находится в положении, соответствующем транспортно.му положению рабочих органов.
Позиционное регулирование. Электронный блок 1 вводит, информацию от датчика 3 положения поворотного вала навесного устройства и от задатчика глубины хода рабочих органов 13, сравнивает их значения и в случае рассогласования выдает на вход исполнительного механизма 16 позиционного регулирования сигнал для подъема или опускания навесного устройства.
Затем электронный блок 1 вводит информацию от датчика 9 действительной скорости агрегата, вычисляет соответствующую действительной скорости интенсивность управляющего воздействия и настраивает регулятор 15 интенсивности управляющего воздействия на вычисленное значение.
Уравнение для интенсивности W управляющего воздействия в функции действительной скорости Vg имеет вид
В Vg,
где А и В - коэффициенты, определяющиеся типом трактора.
Поэтому даже при неподвижном агрегате исполнительный механизм 16 позиционного регулирования поднимает или опускает навесное устройство до тех пор, пока сигналы от датчика 3 положения поворотного вала и задатчика 13 глубины хода рабочих органов не сравняются.
Водитель начинает движение агрегата на гоне, задатчиком 13 глубины хода рабочих органов задает нужное положение навесного устройства трактора. Описанным образом навесное устройство зани.мает требуемое положение. Начинается выполнение нологической операции.
Периодически электронный блок 1 вводит информации от датчиков положения поворотного вала навесного,устройства 3 и действительной скорости 9, от задатчика 13 глубины хода рабочих органов, сравнивает их и корректирует положение навесного устройства и настройку регу;1ятора 15 интенсивности управляющего воздействия.
Перевод рабочих органов в конп,е гона в транспортное положение осуществляют поворотом рукоятки задатчика 13 глубины хода рабочих органов.
Высотное регулирование. Электронный блок 1 вводит информацию от датчика 2 глубины хода рабочих органов, от 3;i,,ui г
чика 13 глубины хода рабочих органов, от датчика 9 действительной скорости. Сигналы от датчика 2 глубины хода рабочих органов и от задатчика 13 глубины хода рабрчих органов сравниваются.. Если имеется рассогласование и агрегат неподвижен, то другие датчики не опрашиваются, подаются управляющие сигналы на входы регулятора 5 интенсивно ;- ти управляющего воздействия и исполни- тельного механизма 17 высотного регулирования. Рабочие органы занимают транспортное положение.
Водитель вводит агрегат в рабочий гон. Переключателем 14 режимов управле- НИИ выбирает необходимое наименование технологической операции, например, «Посев. Задатчиком 13 глубины хода рабочих органов устанавливает требуемую глу бину и начинает выполнение технологической операции.
Электронный блок 1 получает информацию о начале технологического процесса от датчика 9 действительной скорости и задатчика 13 глубины хода рабочих органов, настраивает регуляторы 15 и 20 ин- тенсивности управляющего воздействия на значения, соответствующие скорости агрегата, посредством исполнительного механизма 17 высотного регулирвания заглубляет рабочие органы на заданную глубину и опрашивает датчики.
Если разность между сигналами от датчиков действительной скорости 9 и тео- ретической скорости 10 больше порогового значения, то электронный блок 1 выдает на вход исполнительного механизма 18 догрузки ведущих колес соответствующий сигнал для повышения давления подпора в гидроаккумуляторе, что может повторяться до тех пор, пока значение сигнала от датчика 5 нагрузки на ось направляющих колес не достигнет порогового значения, или пока не начнет уменьшаться глубина обработки (посадки). Тогда догрузка ведущих колес трактора прекратится.
Если значение сигнала от датчика толщины пахотного слоя 8 окажется меньше сигнала от задатчика 13 глубины хода рабочих органов, то электронный блок 1 посредством исполнительного механизма 17 высотного регулирвания будет выглублять рабочие органы до тех пор, пока указанные сигналы не станут равны. При нос- ледующем превыагении толщины пахотного слоя над заданной глубиной, ограничение на глубину обработки автоматически снимается.
На посеве (посадке). Электронный блок 1 в порядке очередности опрашивает также датчики влажности 6 и твердости 7 почвы, накапливает и усредняет их сигналы, сравнивает текущие значения со средними
0
Q
5
5 0
5 Q
5 0
с
и вычисляет поправку к заданной глубине
. (W-Wi)-В (P-Pi), . и В - коэффициенты;
W, W{ - среднее и текущее значения
влажности почвы;
Р, Рг - среднее и текущее значения твердости почвы.
На пахоте и сплошной культивации поправка ДЬ не вычисляется и в реализации алгоритма управления не участвует.
На междурядной обработке и уборке корнеклубнеплодов датчик 8 толщины пахотного слоя работает в режиме определения глубины залегания клубней и корректирует глубину хода рабочих органов
где Н - глубина хода рабочих органов; Z - защитная зона по вертикали на расположение рабочих органов; S - глубина залегания клубней.
Формула изобретения
Устройство для автоматического регулирования глубины хода рабочих органов, содержащее задатчик глубины хода рабочих органов и электронный управляющий блок, к первому выходу которого подключен вход исполнительного механизма высотного регулирования, к первому входу - датчик давления в гидроаккумуляторе, а к второму входу - датчик глубины хода рабочих органов, отличающееся тем, что, с целью повышения качества регулирования, оно снабжено датчиками влажности и твердости почвы, толщины пахотного слоя и действительной скорости агрегата, подключенными соответственно к третьему, четвертому, пятому и шестому входам электронного управляющего блока и совместно с датчиком глубины хода рабочих органов, расположенными на шарнирной платформе, установленной перед агрегатом, и снабжено датчиками положения поворотного вала навесного механизма, нагрузки на ось направляющих колес, теоретической скорости агрегата и положения шарнирной платформы, и задатчиком способов регулирования и переключателем режимов работы, которые подключены к седьмому, восьмому, девятому, десятому, одиннадцатому и двенадцатому входам электронного управляющего блока, к тринадцатому входу которого подключен задатчик глубины хода рабочих органов, а также снабжено исполнительными механизмами дозагрузки ведущих колес агрегата, позиционного регулирования и изменения продольного выноса точки контакта датчиков с почвой и двумя регуля- г торами интенсивности управляющего воздействия, входы которых подключены к соответствующим выходам электронного управляющего блока, при этом гидравлические
входы обоих регуляторов интенсивности управляющего воздействия подключены к гидросистеме агрегата, а выход первого регулятора интенсивности управляющего воздействия связи соединен с соответствующими входами исполнительных механизмов дозагрузки ведущих колес агрегата, высотного и позиционного регулирвоания, а выход второго регулятора интенсивности управляющего воздействия подключен к соответствующему входу исполнительного механизма выноса точки контакта датчиков с почвой, при этом последний кинематически связан с щарнирной платформой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ АГРЕГАТОМ НА ПЕРЕСЕЧЕННОЙ МЕСТНОСТИ | 1988 |
|
RU2100219C1 |
| Устройство для автоматического регулирования пахотного агрегата | 1982 |
|
SU1064883A1 |
| Устройство для автоматической стабилизации коэффициента буксования пахотного агрегата | 1981 |
|
SU1042637A1 |
| Устройство для управления движением трактора | 1980 |
|
SU1014489A1 |
| МЕХАНИЗМ ВЫРАВНИВАНИЯ НАГРУЗКИ ПО ОПОРНОЙ ПОВЕРХНОСТИ ТРАКТОРА | 2002 |
|
RU2236978C2 |
| Электрогидравлическая система автоматического регулирования тяговой загрузки трактора | 1984 |
|
SU1294302A1 |
| СПОСОБ УПРАВЛЕНИЯ И ОЦЕНКИ ПАРАМЕТРОВ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2021654C1 |
| Устройство для регулирования глубины хода сошников сеялки | 1980 |
|
SU923395A1 |
| ПАХОТНЫЙ АГРЕГАТ | 2001 |
|
RU2194379C2 |
| НАВЕСНОЕ УСТРОЙСТВО ТРАКТОРА | 2011 |
|
RU2485742C1 |
Изобретение относится к механизации сельского хозяйства, а именно к автоматизации полевых работ. Целью изобретения является повышение качества автоматического регулирования глубины хода рабочих органов машины. Устройство содержит электронный управляющий блок 1, к входу которого подключены датчики положения поворотного вала навесного механизма 3, давления в гидроаккумуляторе 4, нагрузки на ось 5 направляющих колес, теоретической скорости агрегата 10, а также установленные на платформе датчики глубины хода рабочих органов 2, влажности почвы 6, твердости почвы 7, толщины пахотного слоя 8, действительной скорости 9 агрегата. К входу электронного управляющего блока также подключены задатчики способов регулирования 12, глубины хода 13 рабочих органов и переключатель режимов управления 14, а выходы связаны с регулятором интенсивности управляющего воздействия 15, исполнительным механизмом позиционного 16 и высотного 17 регулирования, исполнительным механизмом дозагрузки ведущих колес 18 агрегата, механизмом изменения продольного выноса 19 точки контакта датчиков с почвой и регулятором интенсивности управляющего воздействия. В процессе работы устройства сигналы со всех датчиков 6 поступают в электронный управляющий блок 1, где обрабатываются по заданным алгоритмам в зависимости от производимой технологической операции, после чего сигналы управления с последнего управляют положением рабочих органов в зависимости от параметров внешней среды и конкретной технологической операции. 8 ил.
ч
«N
Чь II
II
15 i
:s
фиг. 2
( ача/10
/BSod информации (от атчихов 12 13 и перв/ люуателя i
. Btt/Secfnu из ППЗУ 27
констаиты Ъля дан HI
exHO/ioiutj. операции.
/Ввести uH(f)opMOqu, /, от do/77vu/fa fO
f
dbl JUC/lUTb-w Af + BfV -t Ci
i - Гг
c, /);5V/ 5jV- C
Bb/SecTu значений на и/i 15 и 2O
в Sec т и uHcpop ai. от doTvu/ a 11
Bb/VUC UTb:
Af cf., -0/г
Вы Seem и но /ёние AI ИМ 19
двести uHipop a- цию от 6 7
дычис/iumb поправку к заданной глуёине хода роб. арганоё d/ // и/,/5//;
слить бе личин If упроб- ляюи/его ёоздеис.тоия
Лг h,hi -i-uh
Нет
Вывести л на вход Л
BSecTu ин(рормоц от ffafn uf aS S, 10 , 5
дычи слито
S -- У, Р (6
/
,Нет
%г. За
Да
/ Вывести л г на &мЪ им 16
йнлюцить I/1M /в ОЛЯ лодй/- и/ения daS- лений ff ГА до Р
25
561
8
9И1Z
1 П 10
Втд
О т 29
ФигЛ
К18
к 15
у
| Устройство для автоматической стабилизации коэффициента буксования пахотного агрегата | 1981 |
|
SU1042637A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
