Ю
О5
оо ЙзоОретсние относится к сельскохозяй: сгвен)|г)му пронзполству, а точнее к устройствам регулирования пахотных агрегатов с помощью управления системы навески плуга. Известен электрогидравлический регулятор догрузки ведущих колес с тензодатчиками на кронштейне верхней тяги, осуществляющий догрузку ведущих колес трактора в зависимости от увеличения усиления, воспринимаемого верхней тягой трехточечного навесного устройства 1. Наиболее близким по технической сущности и конструктивному исполнению к изобретению ягзляется система управления буксованием колес трактора, содержащая силовые гидровдлиндры, трехпозиционный гид рораспредетитель с электромагнитным управлением, измеритель буксования и схему управления, имеющую сумматор, связанный одним из входов с измерителем буксования 2. Недостатком известного устройства является то, что поддержание буксования а заданных пределах осуществляется путем изменения глубины хода рабочих органов плуга, что приводит к ухудшению качества пахоты и нарущению агротребований к технологическому процессу вспащки. Цель изобретения - повыщение качества пахоты путем уменьшения нестабильности хода рабочих органов по глубине при стабилизации коэффициента буксования в заданных пределах. Эта цель достигается тем, что устройство снабжено задатчиком глубины пахоты, датчиком отклонения глубины пахоты, датчиком давления в гидроцилиндре, блоком формирования управляющего сигнала и двухканальным усилителем мощности, причем задатчик глубины пахоты соединен с датчиком отклонения глубины пахоты, выход которого связан через инвертирующий усилитель с вторым входом сумматора, третий вход которого связан через второй инвертирующий усилитель с датчиком давления в гидроцилиндре, а выход соединен с входом блока. фор.ми.рования управляющих сигналов, выходы которого соединены с входами двухканального усилителя мощности, который своими выходами соединен с входами электромагнитов управления трехпозиционного гидрораспределителя. На чертеже изображена блок-схема предлагаемого устройства. Устройство содержит задатчик 1 глубины пахоты, датчик 2 отклонения глубины пахоты, датчик 3 давления в гидроцилиндре, измеритель 4 буксования, схему 5 уп равления, в которую входят инвертирующий усилитель 6 датчика отклонения глубины пахоты, инвертирующий усилитель 7 датчика давления в гидроцшжндре, сумматор 8, блок 9 формирования управляющего сигнала, двухканальный усилитель И) MouuiocTif. Выходы двухканального усилипмя MOIUFKX-ти связаны с входами электромагнитов уп равлсния трехпозиционным гидрораспреде лителем II, который управляет силовыми гидроцилиндрами 12. Принцип действия устройства за1сп.ючается в следующем. При движении пахотного агрегата сигнал измерителя 4 буксования, а также сигналы датчика 2 отклонения глубины и датчика 3 давления в гидроцилиндре 12 через соответствующие инвертирующие усилители.б и 7 поступают на вход сумматора 8. При этом на выходе сумматора 8 имеется сигнал, уровень и полярность которого определяются выражением , Ue U5Up. идЬ, гдеUj-сигнал на выходе сумматора 8; U(j -сигнал на выходе измерителя 4 буксования; . U|j -сигнал на выходе инвертирующего усилителя 7, пропорционатЬный сигналу датчика 3 давления в гидроцилиндре 12; Uuh Сигнал на выходе инвертирующего усилителя 6, пропорциональный сигналу датчика 2 отклонеиия глубины пахоты. При увеличении сигнала измерителя 4 буксования на выходе сумматора 8 появляется сигнал положительной полярности, пропорциональный величине изменения буксования пахотного агрегата, который поступает на вход блока 9 формирования управляющего сигнала. Выходы блока 9 формирования управляющего сигнала через, двухканальный усилитель 10 мощности соединены с управляющими электромагнитами трехпозиционного гидрораспределителя 11. Соединения в системе выполнены таким образом, что при наличии на выходе сумматора 8 сигнала положительной полярности, уровень которого превышает величину зоны йёчувствите/тьности блока 9 формирования управляюцдего сигнала, трехпозиционный гидрораспределитель 11 устанавливается в положение, при котором подъемная полость силового гидроцилиндра 12 навески соединяется с напорной магистралью гидросистемы трактора. При этом давление в силовом гидроцилиндре 12 возрастает, что приводит к увеличению догрузки ведущих колес трактора за счет разгрузки переднего опорного колеса плуга и уменьшению буксования пахотного агрегата. По мере увеличения сигнала измерителя 4 буксования сигнал на выходе сумматора 8-уменьшается и в момент, когда егоуровень станет меньше зоны нечувствительности блока 9 формироиания управляющего сигнала, на выходе последнего сигнал исчезает и трехпозиционный идрораспрелелитель 12 ycтaf aвливaeтcя ц и тральнос положение. Глубина riaxoriii агрегата определяется установкой опорных колес плуга. Стабилизация коэффициента буксования пррчзволится путем перераспределения вертикальных нагрузок между ведущими колесами трактора и передни.м опорным колесом плуга. С помощью задатчика глубины пахоты можно изменить величину сигнала датчика 2 отклонения глубины пахоты, а следовательно, и величину ШЬ. Это Иринодит к изменению начальных значений буксова1и1я и догрузке ведущих колес. Кроме того, наличие сигнала датчика 2 откло пения глубины пахоты позволяет уменьшить нестабильность хода рабочих органов пахотного агрегата по глубине и за счет этого гюлучнть необходимое качество пахоты.
Применение изобретения позволяет поиысить производительность пахотного агрегата.

| название | год | авторы | номер документа |
|---|---|---|---|
| Система регулирования пахотного агрегата | 1981 |
|
SU961580A1 |
| Устройство для автоматического регулирования пахотного агрегата | 1982 |
|
SU1064883A1 |
| Устройство для автоматического регулирования глубины хода рабочих органов | 1987 |
|
SU1523072A1 |
| Пахотный агрегат | 1980 |
|
SU1014487A1 |
| Устройство для стабилизации курса сельскохозяйственного агрегата | 1983 |
|
SU1160957A1 |
| Навесной многокорпусный плуг | 1985 |
|
SU1353330A1 |
| СИСТЕМА УПРАВЛЕНИЯ АГРЕГАТОМ НА ПЕРЕСЕЧЕННОЙ МЕСТНОСТИ | 1988 |
|
RU2100219C1 |
| Гусеничный трактор | 1986 |
|
SU1324918A1 |
| СПОСОБ УПРАВЛЕНИЯ И ОЦЕНКИ ПАРАМЕТРОВ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2021654C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА | 1991 |
|
RU2032297C1 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ СТАБИЛИЗАЦИИ КОЭФФИЦИЕНТА БУКСОВАНИЯ ПАХОТНОГО АГРЕ-, ГАТА, содержащее силовые гидроцилиндры, трехпозиционный гидрораспределитель с: электромагнитным управлением, измеритель буксования и схему управления, имеющую сумматор, связанный одним из входов с; измерителем буксования, отличающееся тем, что, с целью повышения качества пахоты путом уменьшения нестабильности хода рабочих органов по глубине при стабилизации коэ4фициекта буксования п заданных пределах, оно снабжено задатчиком глубины пахоты, датчиком отклонения глубины пахоты, датчиком давле1|ия в гидроцилиндре, блоком формирования управляющего сигнала и двухкакальным усилителем мощjK)CTH, причем задатчик глубины пахоты соединен с датчиком отклонения глубинь пахоты, выход которого связан через ин; вертирующий усилитель с вторым входом сумматора, третий вход которого CBH3avi через второй инвертирующий усилитель с ; .датчиком давления в гидроцилиндре, а вы:.ход соединен с входом блока формирования а & управляюш.их сигналов, выходы KOTOjwru соединены с входами двухканального усилителя мощности, который своими выходами соединен с входами электромагнитов управления трехпозиционного гидрораспределителя.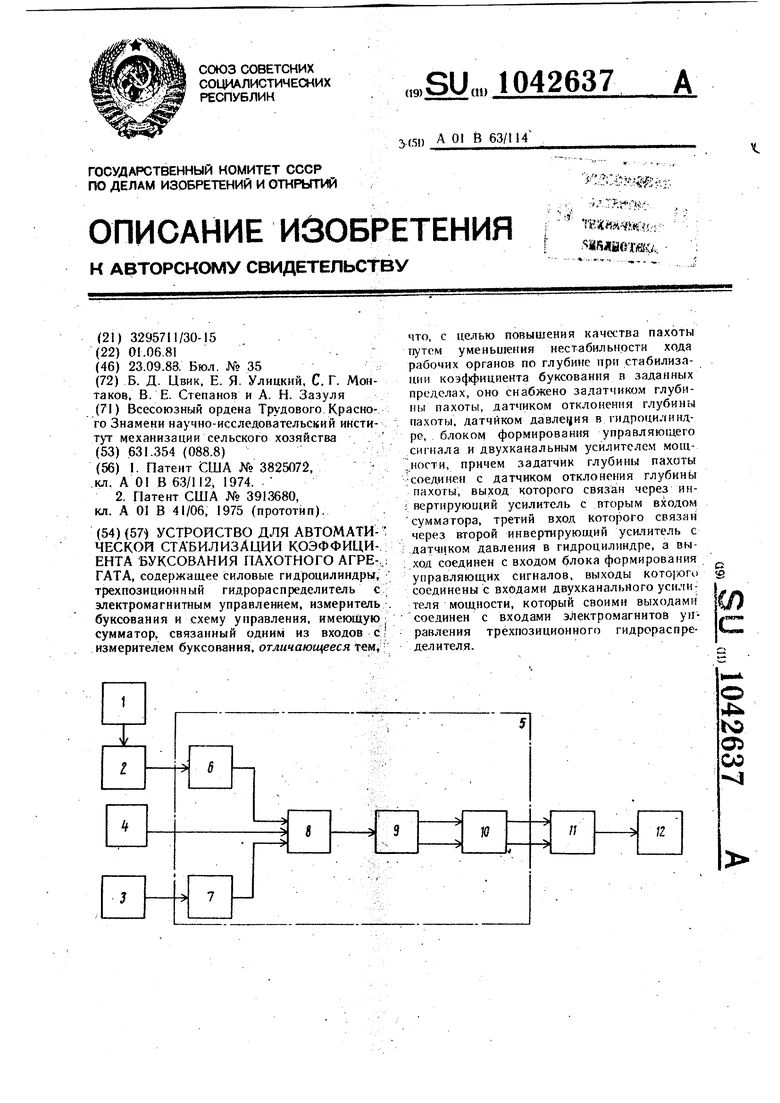
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3825072, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 3913680, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
