А-А
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитный захват | 1988 |
|
SU1646976A1 |
| Магнитный захват для цилиндрических изделий | 1977 |
|
SU742334A1 |
| ПОГРУЖНАЯ БЕСШТАНГОВАЯ НАСОСНАЯ УСТАНОВКА | 2017 |
|
RU2669418C1 |
| Магнитный захват | 1982 |
|
SU1036658A1 |
| Магнитное переключаемое устройство | 1982 |
|
SU1060395A1 |
| Магнитное грузозахватное устройство | 1989 |
|
SU1757984A1 |
| Универсальный бесконтактный измерительный преобразователь тока | 1990 |
|
SU1739307A1 |
| Грузозахватный постоянный магнит | 1990 |
|
SU1778059A1 |
| Магнитное грузозахватное устройство | 1988 |
|
SU1601065A1 |
| Моментомер для статических измерений | 2017 |
|
RU2659180C1 |
Изобретение относится к грузозахватным устройствам и может быть использовано для подъема ферромагнитных грузов. Цель изобретения - повышение удобства в эксплуатации. Магнитный захват состоит из корпуса, между накладками 1 которого размещены магниты 4. К поверхностям накладок 1 прилегают боковыми поверхностями подвижные магнитопроводы 6. В отверстиях 9 накладок 7 корпуса размещены плунжеры 10. Кинематическая связь между магнитопроводом 6 и плунжером 10 осуществляется посредством штифта 11, запрессованного в магнитопровод 6. Полости отверстий 9 соединены между собой при помощи отверстий, образуя общую масляную емкость. При захвате изделий сложной конфигурации магнитопровод автоматически копирует рельеф поверхности. 2 ил.
15
СП
N3
СО
сд
Фил. I
Изобретение относится к грузозахватным устройствам, а именно к магнитным захватам, и может быть использовано для подъема ферромагнитньк грузов.
Цель изобретения - повышение удобства в эксплуатации.
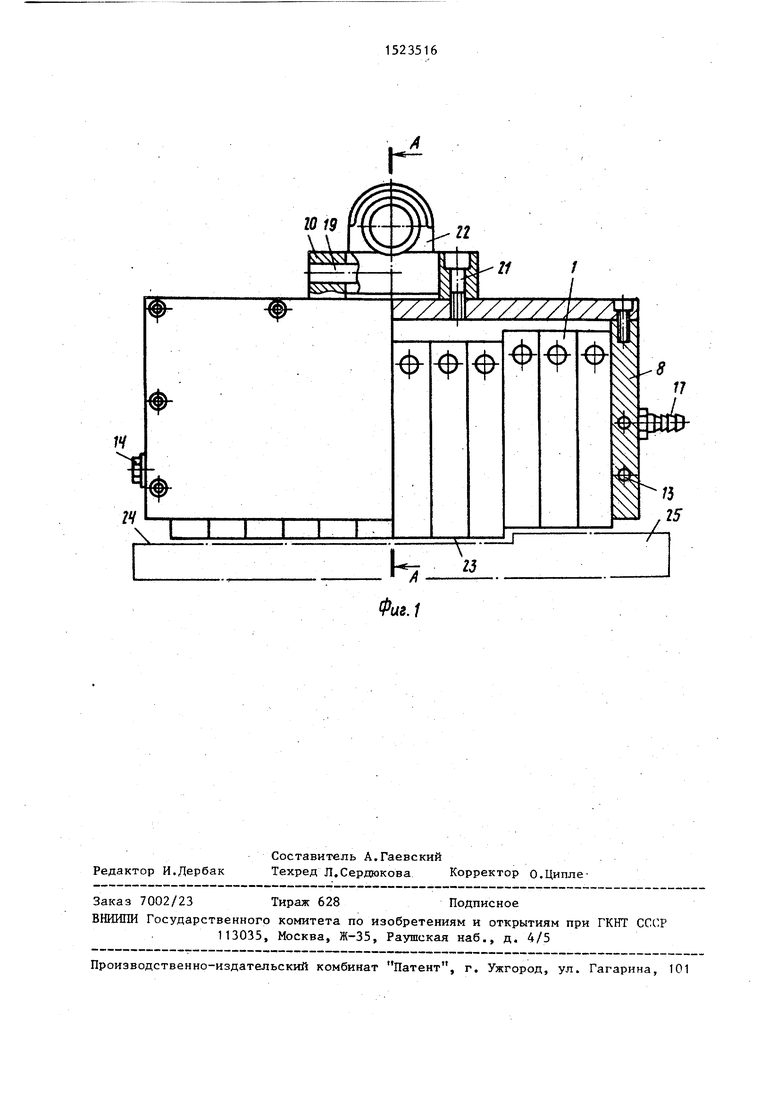
На фиг. 1 представлен мапштный захват, общий вид} на фиг. 2 - разре А-А на фиг. 1.
Корпус магнитного захвата состоит из центральных стальных накладок 1, скрепленных стяжками 2 и сверху пластиной 3 из немагнит|1ого материала. Между накладками 1 размещены оксидно-бариевые магниты А и управляющая катушка 5. К наружным поверхностям накладок 1 прилегают своими боковыми поверхностями подвижные магнитопро- воды 6 призматической формы, кинематически между собой не связанные. К внешним поверхностям магнитопроводов 6 прилегают накладки 7 и 8. В вертикальных отверстиях 9 накладок 7 размещены выполненные по посадке движения плунжеры 10. Кинематическая связ между магнитопроводом 6 и плунжером 10 осуществляется посредством штифта 11, запрессованного в магнитопро- вод 6. Полости отверстий 9 соединены между собой при помощи отверстий 12 и 13, образуя общую масляную емкость. Два отверстия в накладках 7 служат для заливки масла и заглушены пробками 14. Воздухопроводящие каналы 15 магнитопроводов 6 сообщаются с соответствующими каналами 16 накладок 1 и 8.
Штуцер 17 предназначен для подвода сжатого воздуха. Снизу электромагнитная катушка 5 закрыта проставкой 18. К верхней поверхности пластины 3 при помощи оси 19, двух проушин 20 и деталей крепежа 21 закреплена грузовая скоба 22.
Магнитный захват работает следующим образом.
В размагниченном состоянии захват рабочей поверхностью 23 устанавливается на поверхность 24 груза 25. Поверхность 24 может быть как плоской, так и ступенчатой. Благодаря запасу свободного хода каждый из подвижных магнитопроводов 6 устанавливается
0
5
0
5
0
5
0
5
0
по месту, копируя таким образом, профиль поверхности 24 и образуя беззазорное соединение. Для облегчения смещения магнитопроводов 6 в зазоры между трущимися деталями по каналам 15 и 16 подается сжатый воздух, создающий эффект воздушной подушки и одновременно очищающий трущиеся поверхности от загрязнения.
Через электромагнитную катушку 5 пропускают импульс постоянного электрического тока, магниты 4 намагничиваются. Магнитный поток замыкается по деталям магнитной цепи 1 - 4 - 6 - 25. Благодаря отсутствию воздушных зазоров в магнитной цепи магнитный поток Ф .и сила притяжения груза 25 максимальны. В процессе подъема груза 25 под действием его тяжести и силы инерпди подвижные магнитопроводы 6, примагниченные к грузу 25. относительно захвата смещаются и упорньУми штифтами 11 воздействуют на плунжеры 10. Плунжеры 10 давят на масло в полостях отверстий 9 и благодаря несжимаемости масла создается жесткая опора, воспринимающая на себя вес поднимаемого груза 25. При этом в масляной емкости образуется давление.
Раскрепляется груз путем размагничивания магнита 4, пропуская электрический ток обратной полярности через катушку 5.
Формула изобр е.т е н и я
Магнитный захват, содержащий соединенный с подъемным механизмом, открытый снизу корпус с размещенными в нем перемагничиваемыми магнитами, магнитопроводы и средство для фиксации их положения в вертикальной плес- кости относительно стенок корпуса, отличающийся тем, что, с целью повышения удобства в эксплуатации, стенки корпуса выполнены с открытыми сверху вертикальными полостями, в которых установлены плунжеры, а на магнитопроводах закреплены упорные штифты для взаимодействия с верхней частью плунжеров, при этом полости под плунжерами заполнены жидкостью и соединены между собой гидроканалами .
1 1 I 1 1 F
Фиг,1
| Захватное устройство | 1986 |
|
SU1318505A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
