(Л
ел to
со
vj
}8
фие.
печение дистанционного управления процессом. При номинальной скорости вращения вала 3 центробежной силой полумуфты фрикционной муфты 10 поджаты к внутренней поверхности ведомого эксцентрика 5, а колодки тормоза Т7 отжаты от поверхности неподвижного пальца 13. В результате ведущий вал 3 с закрепленным на нем эксцентри- ком 4, эксцентрик 5 и водило 12 совершают синхронное вращение, а шатун 7 преобразует его в возвратно- поступательное движение ползуна 6. Для регулировки /( хода ползуна 6 с помощью регулировочного блока 22 снижают скорость вращения двигателя 19 до 10% от номинальной. В результате полумуфты муфты 10 пружинами 11 отжимаются от внутренней поверхности эксцентрика 5, а колодки тормоза 17 пружинами 18 прижимаются к поверхности пальца 13. Водило 12 останавливается и через ролик 15с пальцем
16останавливает эксцентрик 5 о Эксцентрик 4 с валом 3 медленно вращается относительно эксцентрика 5, Их суммарный эксцентриситет и следовательно, ход .ползуна 6 изменяются. Для окончания регулировки ; по команде с блока 22 запускают двигатель 19 в
е номинальный режим. Муфта 10 и тормоз
17занимают исходное положение, и механизм из регулировочного переходит
в рабочий режим. 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Эксцентриковый кривошипно-шатунный механизм с регулируемым ходом ползуна | 1987 |
|
SU1645607A1 |
| ЦЕНТРОБЕЖНАЯ ПРЕДОХРАНИТЕЛЬНАЯ МУФТА | 1971 |
|
SU292043A1 |
| Импульсный вариатор | 1980 |
|
SU937852A1 |
| ВИНТОВОЙ ПРЕСС С МУФТОВЫМ ПРИВОДОМ | 2005 |
|
RU2312768C2 |
| Центробежная фрикционная предохранительная муфта | 1986 |
|
SU1401182A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ УГЛОВОГО ВЗАИМОПОЛОЖЕНИЯ ВЕДУЩЕГО И ВЕДОМОГО ВАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2088777C1 |
| ЦЕНТРОБЕЖНАЯ ПРЕДОХРАНИТЕЛЬНАЯ МУФТА | 1968 |
|
SU219345A1 |
| Центробежная муфта | 1983 |
|
SU1138563A1 |
| Кривошипный пресс | 1990 |
|
SU1776236A3 |
| Муфта включения | 1990 |
|
SU1796791A1 |
Изобретение относится к кривошипно-ползунным преобразователям вращательного движения в возвратно-поступательное и найдет применение, в частности, в поршневых насосах. Цель изобретения - автоматизация процесса регулирования хода ползуна и обеспечение дистанционного управления процессом. При номинальной скорости вращения вала 3 центробежной силой полумуфты фрикционной муфты 10 поджаты к внутренней поверхности ведомого эксцентрика 5, а колодки тормоза 17 отжаты от поверхности неподвижного пальца 13. В результате ведущий вал 3 с закрепленным на нем эксцентриком 4, эксцентрик 5 и водило 12 совершают синхронное вращение, а шатун 7 преобразует его в возвратно-поступательное движение полузна 6. Для регулировки хода ползуна 6 с помощью регулировочного блока 22 снижают скорость вращения двигателя 19 до 10% от номинальной. В результате полумуфты муфты 10 пружинами 11 отжимаются от внутренней поверхности эксцентрика 5, а колодки тормоза 17 пружинами 18 прижимаются к поверхности пальца 13. Водило 12 останавливается и через ролик 15 с пальцем 16 останавливает эксцентрик 5. Эксцентрик 4 с валом 3 медленно вращается относительно эксцентрика 5. Их суммарный эксцентриситет и, следовательно, ход ползуна 6 изменяются. Для окончания регулировки по команде с блока 22 запускают двигатель 19 в номинальный режим. Муфта 10 и тормоз 17 занимают исходное положение, и механизм из регулировочного переходит в рабочий режим. 3 ил.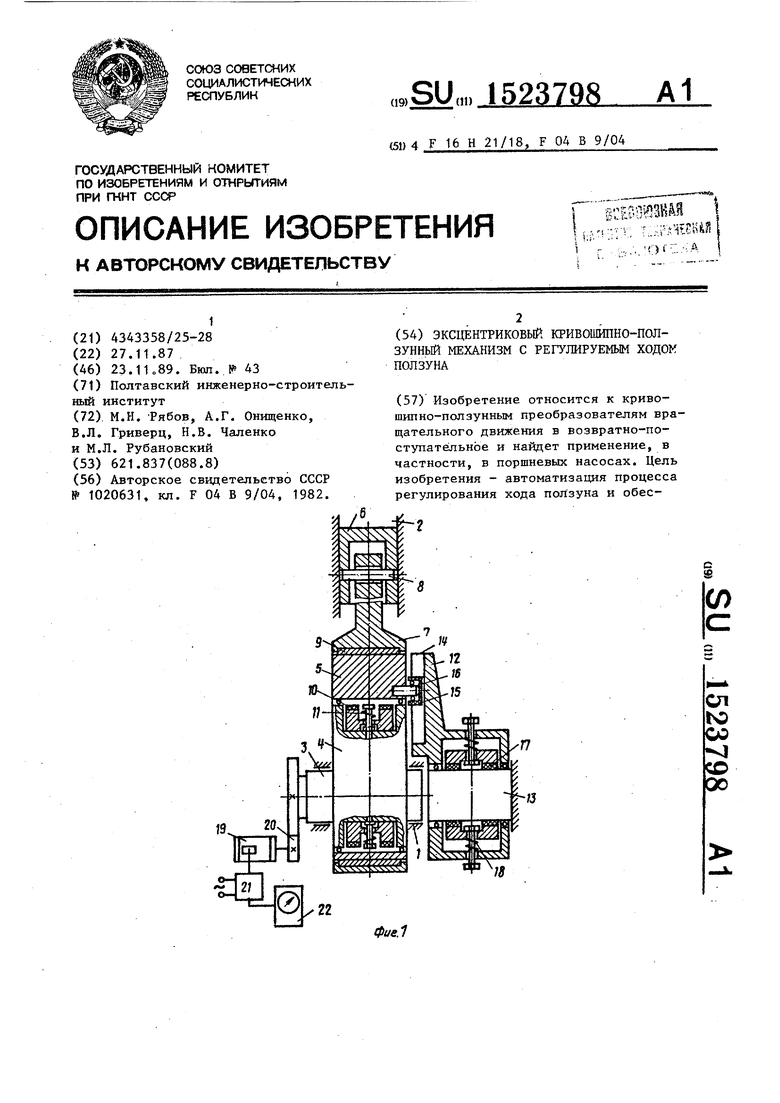
Изобретение относится к машино- строению, а именно к кривошипно-пол- зунным преобразователям вращатель- ного движения в поступательное, и может Найти применение, в частности, в поршневых насосах.
Цель изобретения - автоматизация процесса регулирования хода ползуна и обеспечение дистанционного управ- ления процессом
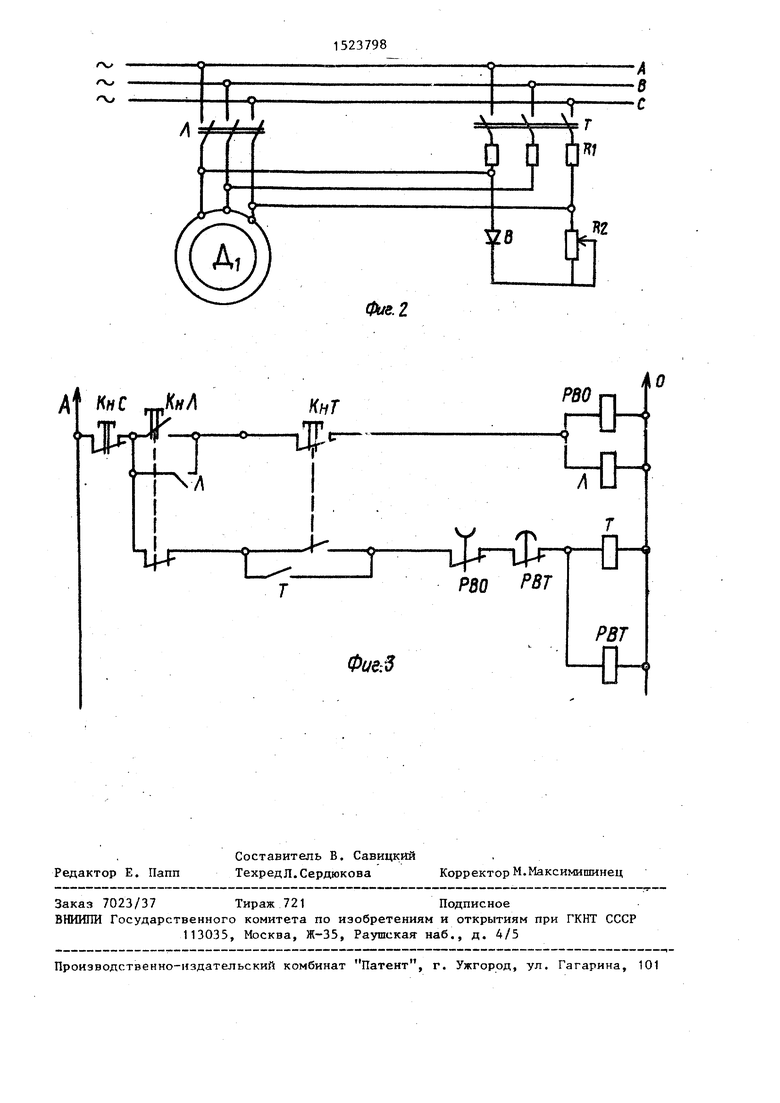
На фиг. 1 показана кинематическая; схема механизма. на фиг.:2 - схема, питания электропривода на фиг. 3 - схема блока дистанционного регулирования скорости электропривода. . . .
Механизм содержит основание 1 с прямолинейной направлянлцей 2, не- дущий вал 3 с закрепленным на нем ведущим эксцентриком 4, ведомый эксцентрик 5, установленный на ведущем эксцентрике 4с возможностью поворота и фиксации, установленный в направлянлцей 2 ползун 6, и шатун 7, одним концом через шарнир 8 связанны с ползуном 6, а другим концом через подшипник 9 качения охватывающий ведомый эксцентрик 5.
Ведущий эксцентрик 4 и ведомый эксцентрик 5 кинематически связаны мевду центробежной фрикционной муфто
10,которая в состоянии покоя или при малой скорости вращения поджата к ведущему эксцентрику 4 пружиной
5
5
0
Q 5 П
5
вокруг пальца 13, закрепленного на основании 1 соосно- ведущему валу 3. Водило 12 имеет радиальный паз 14, в котором может перемещаться ролик 15,. установленный на пальце 16, который закреплен в ведомом эксцентрике 5. На ступице водила 12 установлен .центроб.ежный фрикционный тормоз 17, предназначенный для периодического вза.имодействия с пальцем 13. В состоянии покоя или при малой скорости вращения водила 12 колодки тормоза 17 поджаты к пальцу 13 пружинами 18.
Для вращения ведущего вала 3 служит электропривод в виде, например, асинхронного двигателя 19, связанного с валом 3 через зубчатзпо передачу 20.. Для питания и управления электродвигателем 19 служат силовой блок 21 и блок 22 дистантдионного регулирования скорости электродвигателя 19.
Механизм работает следующим образом.
При нажатии на кнопку КнЛ включается и самоблокируется контактор Л (фиг. 3 и 2). Одновременно срабатывает реле времени РВО и размыкает свой.контакт в цепи контактора Т. Двигатель t9 (Д1) работает с номинальной частотой вращения, которая через передачу 20 сообщается ведущему валу .3., ,
Вследствие большой скорости враще-т НИН вала. 3 и закрепленного на нем ведущего эксцентрика 4 полумуфты центробежной фрикционной муфты 10 преодолевают усилие пружин .11 и поджимаются к внутренней поверхности ведомого эксцентрика 5, который начинает вращаться синхронно с эксцентриком
4и через шатун 7 сообщает ползуну 6 возвратно-поступательное движение.
Одновременно ведомый эксцентрик
5через палец 16 и ролик 15 сообщает водилу 12 вращение с той же скорость При этом колодки центробежного тормоза 17 преодолевают усилие пружин 18
и отходят от поверхности пальца 13. Водило 12 свободно вращается синхронно с эксцентриками 4 и 5,
Для изменения хода ползуна б мают и отпускают кнопку КнТ. При это отключается контактор Л и включаются контактор Т и реле времени РВТ. Резисторы S. ограничивают ток статора и переводят двигатель 19 (Д1) в режи ;динамического торможения, когда его скорость составляет менее 10% от но- г-шнальной,
: Вследствие малой скорости враще- ния вала 3 полумуфты муфты 10 пружи- наш 11 отжимаются от внутренней поверхности ведомого эксцентрика 5, и эксцентрики 4 и 5 оказьшаются разъединенными. В то же время прзгашны 18 прижимают колодки тормоза 1.7 к поверхности пальца 13, и водило 12 останавливаетея Благодаря взаимодействию пальца 16 и ролика 15 с пазом 14 водила 12 останавливается и э-кс- центрик 5, а эксцентрик 4 продолжает вращаться относительно него с малой скоростью. Вследствие изменения взаимного расположения эксцентриков 4 и 5 изменяется и их суммарный эксцентриситет и, как следствие, величина хода ползуна 6. Величина угла относительного поворота эксцентриков 4 и 5 определяется настройкой реле времени РВТ.
Через заданное настройкой время контакты РВТ размыкаются, и повторным нажатием кнопки КнЛ механизм пе- реклю 1ают на номинальный ежим работы. Для увеличения диапазона регулирования не нажимают кнопку КнЯ, а на-
Q
5
0
5
0
0
5
0
5
жимают требуемое количество раз кнопку КнТ, дискретно изменяя взаимное положение эксцентриков 4 и 5 на требуемую величину, после чего и нажимают кнопку КнЛ, переводя механизм в номинальный режим. Для остановки механизма нажимают кнопку КнС, отключая силовой блок и блок регулирования от электросети,. При этом реле времени РВО с заданной вьщержкой времени замыкает свой контакт, подготовив систему к следующему пуску.
Фо- , рмула изобретения
Эксцентриковый кривошипно-пол- зунный механизм с регулируемым кодом ползуна, содержащий основание с прямолинейной направляющей, установленный в основании ведущий вал с закрепленным на нем ведущим эксцентриком, ведомый эксцентрик, установлен- ньй на ведущем эксцентрике с возможностью поворота и фиксации, установленный в направляющей ползун, шатун, шарнирно связанный одним Концом с полззтнюм, а другим концом - с ведомым эксцентриком, муфту для связи ведущего и ведомого эксцентриков, устройство регулировки хода ползуна и электропривод ведущего вала, отличающийся тем, что, с целью автоматизации процесса регули- . рования, муфта связи ведущего и ведомого эксцентриков вьтолнена центробежной, фрикционной, устрой- ство регулировки хода ползуна выполнено в виде поворотного водила с радиальным пазом, установленного на основании соосно с ведущим валом, центробежного фрикционного тормоза,. установленного на водиле и предназначенного для периодического взаимодействия с рснозанием, пальца, закрепленного в ведомом эксцентрике, и ролк- ка, установленного на пальце и взаимодействующего с радиальным пазом водила, а механизм снабжен блоком дистанционного регулирования скорости вращения электропривода.
гч го X/
8
;
фие.2
| Регулируемый эксцентриковый поршневой насос | 1981 |
|
SU1020631A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
