(21)-CiOiCMI 25-1)8
(22)I 1 03.8,4
(4Г)) 07.12 81, . 45
(71)В(чч:(1К) (иый и;п чно-иетлсдовательский, кс)(к ri)vKт|к-кий и техно. 1с)гический инсги-руг мокшиклон и мл.кк штра жиых бен; иновы /iFuu 1 те.И и ин) rpniiuMci сгорания
(72)Л. Д. llii;nu)B и В. Я. Павлнксм (53) 62.220.72 (08«.8)
(5В| «t oMMH . Ф. Приспос)Г)ле1Шя и гн гюмг)- I ,ч , 11.:ый и 111 тр VU4I; к кжарным етаиклм М. Маш и 1, I(ti3. с 28, фиг. 20Г).
(54) 5Л.влти()-: У(;тгчм 1(:гвс)
(57) 1 huopcriMinc oriu) к машшкн- трос Hithi, fi ча чнопи к :(ахв;г1ным устройствам робогои и .1ЯТ()ров Це. П. и.((.)Г(рП( - иия расширение (j-iy мкцнональны х вонмпж
ногтей .ta счет обеснечсния надежного .чах- вата н нолинионнрования сфери нч ки.х деталей стройстпо содержит корпус I с ра, метенными в нем двумя группами т,)жим иы.х элементов в виде стержней 4 с роликами 8. Обе rpyiiin i :и1жиммы.х .мен- 7ОВ );)С11оложены в пе| есекак)Н1Ихся плоскостях, цент() пересечения которьгх лежит на оси з,.хвата (лержни 4 гих-щру жинены OTtio сительно к() пружинами 5 и кинематн- (н ки CBH.iaHii с силовым приводом 2 Kiruip- ными кольцами ,) и 1П. ( гержни уст,1нов- .чены fio cijiepbi .(ахвата и (о,1ика- ми 8 вчаи.модейсгву К)т с рабочими поверх- ностя.ми, ныпо;1иенмь1ми на внутренних частях копириых ко.к н ) н 1 К 11ерифери1(- ные части конирных Ko/ieii устанпв.теиы в па.чах корпуса. I .гп.|()-лы, 2 и,п.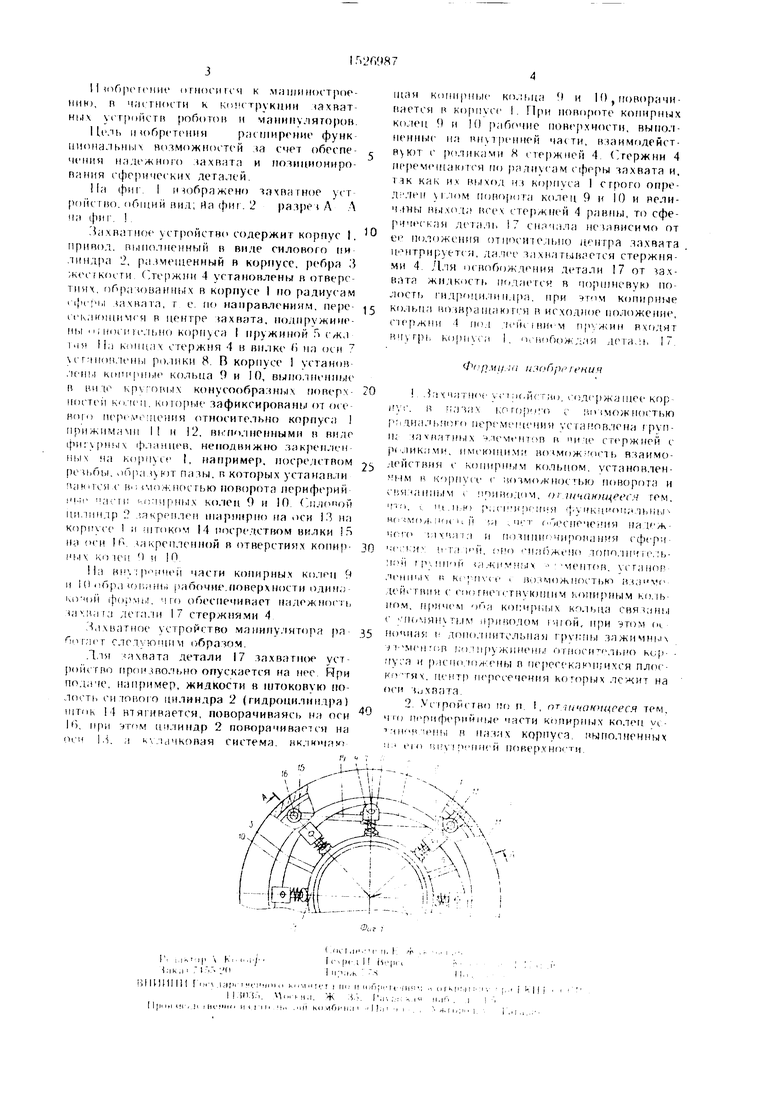
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для продольной резки колец по образующей | 1986 |
|
SU1344526A1 |
| Двумерная автоматическая система компенсации | 1976 |
|
SU636587A1 |
| УСТРОЙСТВО для ОБРЕЗИНИВАНИЯ ПЯТКИ ВЕНТИЛЯ АВТОКАМЕРЫ | 1972 |
|
SU331928A1 |
| РАЗДВИЖНОЙ ЗАХВАТ ТРАНСПОРТНОГО СРЕДСТВА КЛИАТИОИ ДОРОГИ | 1971 |
|
SU436479A3 |
| СТАНОК ДЛЯ ОБРАБОТКИ ФАСОННЫХ ДЕТАЛЕЙ | 1972 |
|
SU341634A1 |
| Грабли поперечные конвейерные | 1984 |
|
SU1311658A1 |
| Устройство для сборки и сварки изделий из стержней и пластин | 1985 |
|
SU1274897A1 |
| Устройство для сварки деталей из термопластов | 1980 |
|
SU887225A1 |
| ФОРМОВОЧНАЯ МАШИНА | 1972 |
|
SU350569A1 |
| Армоопалубочный блок | 1988 |
|
SU1534156A1 |
Изобретение относится к машиностроению, в частности к захватным устройствам роботов и манипуляторов. Цель изобретения - расширение функциональных возможностей за счет обеспечения надежного захвата и позиционирования сферических деталей. Устройство содержит корпус 1 с размещенными в нем двумя группами зажимных элементов в виде стержней 4 с роликами 8. Обе группы зажимных элементов расположены в пересекающихся плоскостях, центр пересечения которых лежит на оси захвата. Стержни 4 подпружинены относительно корпуса пружинами 5 и кинематически связаны с силовым приводом 2 копирными кольцами 9 и 10. Стержни установлены по радиусам сферы захвата и роликами 8 взаимодействуют с рабочими поверхностями, выполненными на внутренних частях копирных колец 9 и 10. Периферийные части копирных колец установлены в пазах корпуса. 1 з.п.ф-лы, 2 ил.
7 9 12
СЛ ГС
Oi СО 00
Фиг. 2
11 (оГ)|1(П(М1И( пгмосии ч к .м;п11ИН()( тр(1р- ник), п UiciHocTH к конструкции (зхват HI.IX уггрпйстр роботои и маиинуляторог.
iiuifipcTiMiHHp;u 1лир«м1ие функuiiona- ibHi .ix нозмпжи()1 тсй за счет обеспечения н.члежнпго захвата и ночмциониро- пания гфе1)ических деталей.
Па фи1 I мображено чахпатное уст poiiciBd. ибщий пил; Иа cjini. 2 разрез Л А на фиг, .
Чахватиое устройстн( содержит корпус I. припол. выполненный в виде силового ни линдра L , разметенный в корпусе, ребра 3 ;к«ч- косги, Гл ержни 4 установлены в (iTBepc- 111ЯХ. г)Г разован 1Ь,х в корпусе 1 по радиусам 1 i|ict4,i захвата, г с. (к.) направлениим, пе)е- сгк.пощимгя в центре захвата, подпружинены I i ifoi i п . и.но корпуса I пружиной fi ежа 1чя 11;1 KiiHuax стержня 4 н внлкс ) на оси мтчиоп/н ны ролики 8. В корпусе 1 устанон лс И1,1 к(11ччч ы кольца 9 и 10, выlloлFleины( в ни 10 .1х конусообразных поверх- MocTeii K l.icii. коюрые зафиксирована от о(е- В(мо ие|1|-| г:цения (1тносительно корпуса 1 прижимами I и 12, в|1:полпемнымн в виде фи:)1(ы ifi.i;nineB, неподвижно закрен-теи- fibix на K(|inyLe t, например, посредством )ы, ,1праз к)т пазы, в которых устанав.-ти анисяс Ffi; (можиосгью поворота пернф(1ий i i-;i агп: -,(мириых ко.чеп 9 и 10. (лз. К чгп Ии/111илр 2 ..акреплеп шаряпрно на оси 13 )ьч кпрпхсе 1 и HJTOKOM 14 |чн редстр«)М ви.лки п на 1си 1Г закрепленной в отверстиях копир- ны X KI) UMI П и 1 П,
)а нн ; p inieii чясги копярных ко.чеп 9 и i (I обра .i |).поверхности один, )й формь, чго обеспечивает надежносм, замима летали 17 стержнями 4
axBaTtuie устройство манипулятора )а . ii r слгл . образом.
Лли захвата детали 17 за.хватпое уст- poiicTBo произвольно опускается на нее, Нри подаче. на11)имер, жидкости в гптоксзвую по- ,.1ость ситового цилиндра 2 (гидроци,тиндра) iiiTdh 14 втягивается, поворачиваясь на оси I ), ири этом 1илипдр 2 поворачивается ва (,1си 1,1. а k , и1чк()вая система. нк,-|ючах
/
ко И1риые
9 и 10 (юворачи
0
5
0
5
0
вается в Ko invce I. повороте копирных колец 9 и К) 1аб(чие Г1ове 1хиости, выпол- fienBhic иа вкмренней части, взаимодействуют с роликами 8 стержней 4, (/гержни 4 пр еме|на1о1( я по радиусам С|{)еры захвата и, тзк как trv выход и, Kr)piiyca 1 )го опре- д; Леи vi. ioM tioFiojKira ксыец 9 и И) и вели- 4.tHbi выхода всех стержней 4 равны, то сферическая дсча, 1ь 17 сначала независимо от 11о,тожч:ния относи 1е.:ц,по центра захвата Ц|: нтри| ;ует( а. дал(ч захиат(.ав; ется стержнями 4, /1 1Я освобождения детали 17 от чах- ватя жидкость иодаегси в гюршневую по- ;iocTb гид 1 |ци, И1 ii.ifia, ири чтом коиириые кольиа liOiBjiaшаюп. я в исходное положение, с-|ержни 4 (10.1 лсйс1вИ1 1 вхг/дят нчугрь корпуса I, п,-|1 1бож:;;ая д(та,;ь 17,
Ф1 р мц/1п u: of pi гения
,iri X иат кч VC I нойсти) содержащее кор- 1.. в пазах i;o rf)),i:-o с .)жностью н диа,чьио|-п пергмпчсиия vc гамов.чсна t pyri- и; захпат.ных -.тс Мептов в пиле ст ржней с р( ликами, имеющими в(чмож ос1ь взаимодействия с коиириым кольцом, установ.тен- мым I корпусе с возможное bi(j гюворота и связанным с ипииодом, т ичан щееся гем,
ПО. ; ,n-K) (4 H;U lrMSl фу ИК 11-01 ;,ЧЬИЫ
но-;мо/ь мое 1; а ,, ч(-т о еспечекия иа р Ж- liCii i з,чх,.-п.з и Г1 :,пици )чи 1оваи Я сфери- (C I .-A-- i T.-i 1СЙ. ( НО сиа(жсио логто. шч i о. ;ь- iioi i грхпиой ifi. f invMiJX - MetiTOB. усгангм .U4iMi,ix IS К( t . возможностью вз;м х о ,1ейстпии С ciiorFu i )И|им isoinifuibiM ко.н ио,м, ооа ко1;ир1л.1х кгмьца святаиы с . номяну т, iipitiuxTOM 1.иой, ири этом гк ночиая 1; лоно.тнитольиая групП) зажимнь х П меигс,в 1;о,-М1(|ужппе1, г) гио( KC. чу; а и ),-1спо, 11)жены в г|ерес( как1и;ихся пло(-- кптях, ЦСНТ11 пересечения кс)горых лежит на оси 3,,
2, VctpoMCTBo ) п, . пгщчонпцееся тем, Ч1О (И риферийиые части ко.пирных колец vc- змонимп, в пазах корпуса, мыпо.шенных i, 14 П isns ччии. й поверхност.
