6
(Л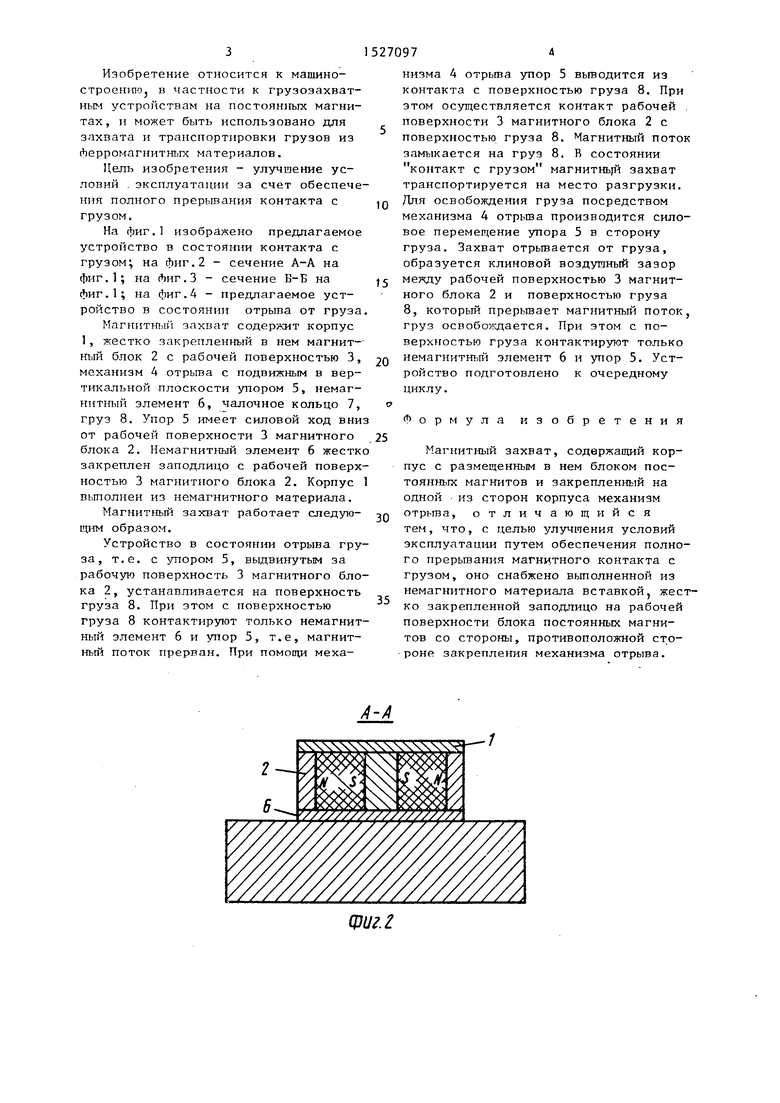
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитное грузозахватное устройство | 1988 |
|
SU1601065A1 |
| Грузозахватное устройство | 1983 |
|
SU1134522A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО НА ПОСТОЯННЫХ МАГНИТАХ | 2010 |
|
RU2452681C1 |
| Грузозахватное устройство | 1983 |
|
SU1152911A1 |
| Автоматический магнитный захват Быченко | 1980 |
|
SU933602A1 |
| Автоматический магнитный захват | 1989 |
|
SU1675184A1 |
| Грузозахватное магнитное устройство | 1987 |
|
SU1418253A1 |
| Магнитный захват | 1988 |
|
SU1604715A1 |
| Магнитное грузозахватное устройство | 1990 |
|
SU1775348A1 |
| МАГНИТНАЯ ТРАВЕРСА С ЭЛЕКТРОПОСТОЯННЫМИ МАГНИТНЫМИ ЗАХВАТАМИ | 2015 |
|
RU2582742C1 |
Изобретение относится к области машиностроения, в частности к грузозахватным устройствам на постоянных магнитах, и может быть использовано для захвата и транспортировки грузов из ферромагнитных материалов. С целью улучшения условий эксплуатации за счет обеспечения полного прерывания связи с грузом устройство снабжено немагнитным элементом 6, жестко закрепленным заподлицо на рабочей поверхности 3 магнитного блока 2 со стороны, противоположной стороне закрепления механизма 4 отжима. 4 ил.
X
-4 k7 Т
-g
СП -sj
О
со
Фиг.1
Изобретение относится к мапшно- CTpOGHWOj в частности к грузозахватным устройствам на постоянных магнитах, и может быть использовано для захвата и транспортировки грузов из ферромагнитных материалов.
Цель изобретения - улучшение условий . эксплуатации за счет обеспечения полного прерьгеания контакта с грузом.
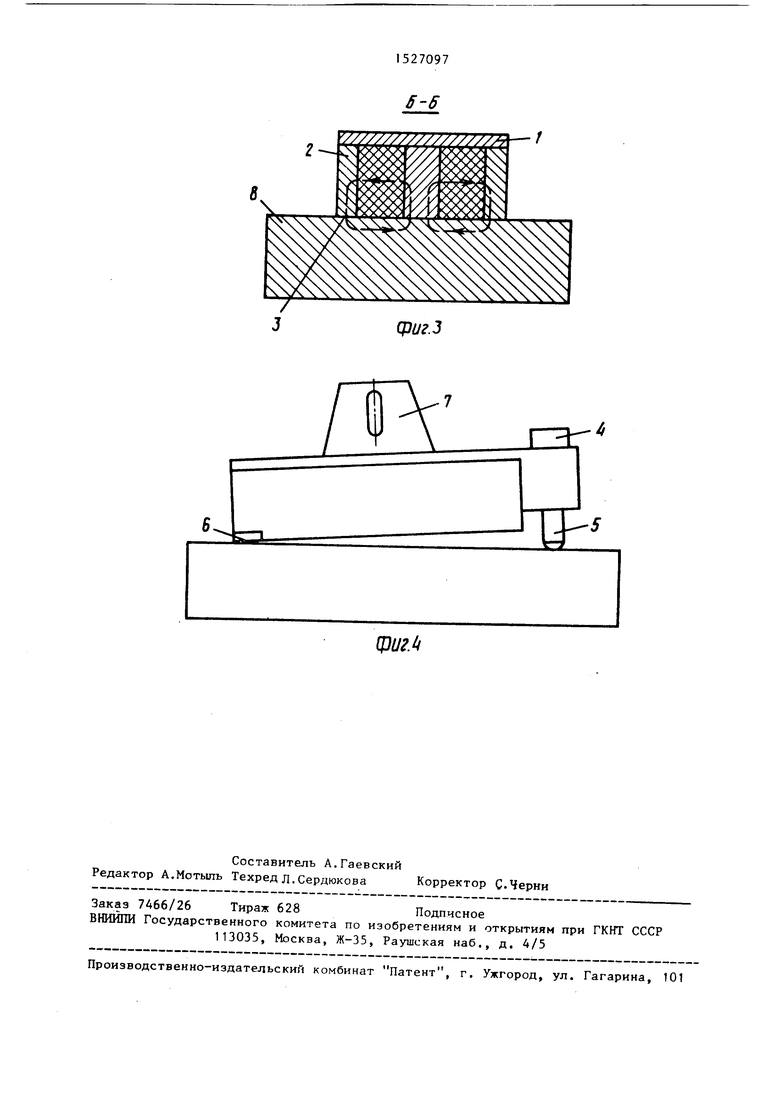
На фиг.1 изображено предлагаемое устройство в состоянии контакта с грузом; на фиг.2 - сечение А-А на фиг.; на Лиг.З - сечение Б-Б на фиг.1; на фиг.4 - предлагаемое устройство в состоянии отрыва от груза
МагнитШ11Й захват содержит корпус 1, жестко закреплен1й,Й в нем магнит-- ный блок 2 с рабочей поверхностью 3, механизм 4 отрьгоа с подвижным в вертикальной плоскости упором 5, немагнитный элемент 6, чалочное кольцо 7, груз 8. Упор 5 имеет силовой ход вниз от рабочей поверхности 3 магнитного блока 2. Немагнипсзш элемент 6 жестко закреплен заподлицо с рабочей поверхностью 3 магнитного блока 2. Корпус вьтолнен из немагнитного материала.
Магнитный захват работает следующим образом.
Устройство в состоянии отрыва груза, т.е. с упором 5, выдвинутым за рабочую поверхность 3 магнитного блока 2, устанавливается на поверхность груза 8. При этом с поверхностью груза 8 контактируют только немагнитный элемент 6 и упор 5, т.е, магнит- ньш поток прерван. При помощи меха
5
0
5
низма 4 отрьгоа упор 5 вьгеодится из контакта с поверхностью груза 8. При этом осуществляется контакт рабочей поверхности 3 магнитного блока 2 с поверхностью груза 8. Магнитный поток замыкается на груз 8. В состоянии контакт с грузом магнитньрЧ захват транспортируется на место разгрузки. Для освобождения груза посредством механизма 4 отрьша производится силовое перемещение упора 5 в сторону груза. Захват отрьгоается от груза, образуется клиновой воздушный зазор между рабочей поверхностью 3 магнитного блока 2 и поверхностью груза 8, который прерьшает магнитный поток, груз освобождается. При этом с по- верх гостью груза контактируют только немагнитньш элемент 6 и упор 5. Устройство подготовлено к очередному циклу.
Формула изобретения
Магнитный захват, содержащий корпус с размещенным в нем блоком постоянных магнитов и закрепленный на одной из сторон корпуса механизм
отрьгоа,
отличающийся
тем, что, с целью улучшения условий эксплуатации путем обеспечения полного прерьгоания магнитного контакта с грузом, оно снабжено вьтолненной из немагнитного материала вставкой, жестко закрепленной заподлицо на рабочей поверхности блока постоянных магнитов со стороны, противоположной стороне закрепления механизма отрыва.
фиг. 2
сриг.
фиг.
| Магнитный захват | 1982 |
|
SU1036658A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
