(54) АВТОМАТИЧЕСКИЙ МАГНИТНЫЙ ЗАХВАТ БЫЧЕНКО

| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитный захват | 1980 |
|
SU903276A1 |
| Автоматический магнитный захват | 1979 |
|
SU770989A1 |
| Магнитный захват | 1978 |
|
SU770988A1 |
| Магнитное грузозахватное устройство | 1989 |
|
SU1763341A1 |
| ВАКУУМНЫЙ ВЫКЛЮЧАТЕЛЬ | 2013 |
|
RU2545163C1 |
| ВАКУУМНЫЙ ВЫКЛЮЧАТЕЛЬ | 2012 |
|
RU2521609C2 |
| МАГНИТНЫЙ ЗАХВАТ | 1971 |
|
SU304811A1 |
| Грузоподъемное магнитное устройство | 1982 |
|
SU1096186A1 |
| Магнитное грузозахватное устройство | 1975 |
|
SU821379A1 |
| Магнитное грузозахватное устройство | 1988 |
|
SU1601065A1 |
1
Изобретение относится к грузоподъемным устройствам с магнитными захватами и может быть использовано при подъеме нетарированных грузов.
Известен магнитный захват, содержащий корпус с установленными в нем подвижным и неподвижным магнитными блоками и механизмом управления замыканием и размыканием магнитного потока. В подвижной относительно корпуса захвата крюковой подвеске установлена взводимая под действием веса захвата пружина. На подвеске неподвижно закреплена зубчатая рейка, входящая в зацепление с щестерней, снабженной осью для крепления собачки храпового механизма и установленной свободно на храповом валике, на концах которого расположены кривошипы, связанные тягами с зубчатым сектором, приводящим в движение подвижный магнитный блок с помощью укрепленной на нем зубчатой рейки 1.
Недостатком указанного устройства является отсутствие элементов, обеспечивающих безопасность при подъеме нетарированных грузов и повышение надежности в работе.
Известен также автоматический магнитный захват, содержащий корпус, подвижные магнитные блоки, механизм управления
замыканием и размыканием магнитного потока и соединенный с подвижными магнитными блоками пружинный демпфер, шток которого соединен с подвеской для навешивания на крюк крана 2.
10 Этот магнитный захват имеет сложную конструкцию, так как механизм управления замыканием и размыканием магнитного потока его содержит большое количество вращающихся деталей, что вызвано горизонтальным расположением подвижных и не подвижных блоков, сориентированных равнополярно, а их взаимное перемещение для замыкания и размыкания магнитного потока осуществляется путем поворота подвижных блоков относительно горизонтальной оси.
20 Цель изобретения - повыщение надежности работы захвата при подъеме ферромагнитных грузов и быстродействия.
Цель достигается тем, что корпус включает три прямоугольных магнитопровода.
жестко соединенных пластинами из немагнитного материала, в которых выполнены вертикальные направляющие пазы, в которых установлены с возможностью перемещения подвижные магнитные блоки из постоянных магнитов, сориентированные однополярно друг к другу и снабженные щпонками, причем средний магнитопровод выполнен со сквозным центральным вертикальным отверстием для установки пружинного демпфера и имеет активное сечение, равное сумме двух одинаковых сечений крайних магнитопроводов, а механизм управления замыканием и размыканием магнитного потока включает тросы, соединяющие подвижные магнитные .блоки со втулкой пружинного демпфера и огибающие направляющие ролики, прикрепленные к корпусу над магнитными блоками, прикрепленные к корпусу двухтактные переключатели и блокировочные механизмы и закрепленные на тросах по два упора, взаимодействующие один с двухтактными переключателями, а другой с блокировочными механизмами.
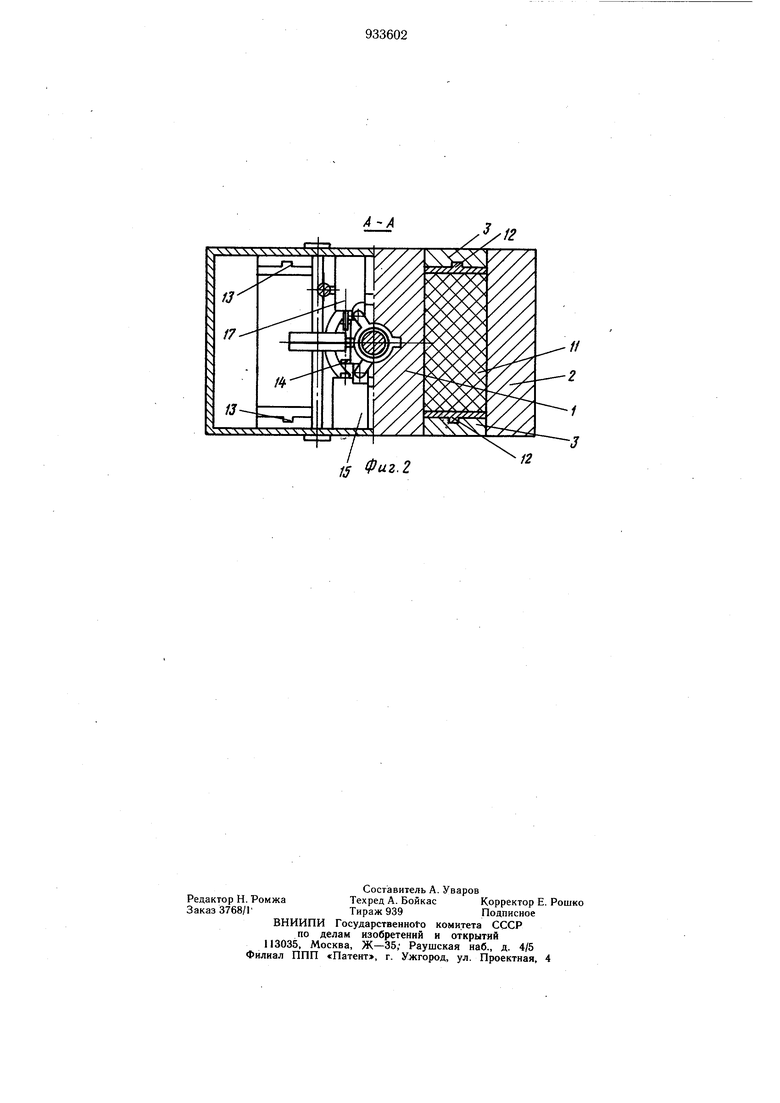
На фиг. 1 изображен захват в исходном положении, вертикальный разрез; на фиг. 2сечение А-А на фиг. 1 (при рабочем положении подвижных магнитных блоков).
Захват состоит из корпуса, выполненного в виде трех прямоугольных магнитопроводов из магнитомягкого материала, причем средний магнитопровод 1 имеет активное сечение, равное сумме двух одинаковых сечений крайних .магнитопроводов 2.
Магнитопроводы между собой жестко соединены пластинами 3 из немагнитного материала. На среднем магнитопроводе 1 жестко закреплена направляющая 4. В среднем магнитопроводе 1 и направляющей 4 соосно выполнены сквозные центральные вертика.тьные отверстия для установки пружинного демпфера. Пружинный демпфер состоит из щтока 5, направляющей втулки б, закрепленной жестко на нижнем конце щтока 5, и пружины 7.
На верхнем конце щтока 5 закреплена подвеска 8. Ко втулке 6 демпфера при помощи тросов 9 через направляющие ролики 10, закрепленные к корпусу захвата, присоединены подвижные армированные магнитные блоки 11 со щпонками 12, входящими в пазы 13 пластин 3. На тросах 9 закреплены по два командных упора: упоры 14 для воздействия на механизмы двухтактных переключателей 15 и упоры 16, взаимодействующие с блокировочными механизмами.17, снабженными инерциальными толкателями 18, закрепленными на крыщке 19 корпуса. На пружине 7 демпфера закреплена обоймасбрасыватель 20 механизмов переключателей 15 и блокировочных механизмов 17.
Автоматический магнитный захват Быченко работает следующим образом.
Захват устанавливается на поверхность транспортируемого груза. В исходном положении магнитная система захвата нейтрализована, подвижные блоки 11 выведены из магнитопровода корпуса. При подъеме крюка грузоподъемного устройства вместе с подвеской 8 начинает перемещаться щток 5, который за счет собственного веса захвата втулкой 6 сжимает пружину 7. При этом подвижные блоки 11 опускаются и входят
в зазоры между средним 1 и крайним 2 магнитопроводами на глубину HH, обеспечивающую создание магнитного потока, при котором захват развивает номинальную грузоподъемность. При этом упоры 14 свободно проходят через переключатели 15, а упоры 16 ограничивают дальнейщее перемещение блоков 11. Магнитный поток замыкается через груз, обеспечивая возможность захвата груза с массой, не превыщающей номинальную, так как в первоначальный .момент .масса поднимаемого груза ограничивается величиной магнитного потока, создаваемого при опускании блоков на величину Нц. При дальнейщем подъеме подвески пружина 7 продолжает сжиматься под действием собственного веса захвата и веса гру5 за. Натяжение тросов 9 ослабляется. После отрыва груза от поверхности, на которой он установлен, под действием ускорения приводного механизма крана в начальный момент подъема захвата с грузом толкатели 18 возQ действуют на защелку механизма 17, расфиксируя блоки 11.
Подвижные блоки 11 под действием их собственного веса и магнитного поля втягиваются в зазоры между магнитопроводами на глубину Нр , пропорциональную весу поднимаемого груза, чем обеспечивается гарантированный запас надежности при подъеме и транспортировании нетарированных грузов.
Создание запаса надежности обеспечивает безопасность эксплуатации захвата, так как транспортирование груза выполняется при повыщенном магнитном потоке, что снижает влияние ускорений, толчков, раскачивания на надежность удержания груза-. Допо тнительно при натяжении тросов
5 между подвижными блоками 11 и направляющей втулкой 6 пружинного демпфера происходит активная компенсация влияния ускорений приводного механизма крана, т. е. магнитное демпфирование, что позволяет сохранять постоянный запас надежности как при подъеме, так и при опускании нетарированных грузов.
При постановке груза после окончания транспортировки под действием пружины 7 блоки 11 возвращаются в исходное положение. Обойма-сбрасыватель 20 в нижнем положении переключает переключатели 15 и взводит механизмы 17. При последующем подъеме захвата блоки 11 не опускаются, так как переключатели 15 взаимодействуют с упорами 14. Происходит подъем и транспортировка магнитного захвата без груза. При последующей постановке захвата на груз обойма-сбрасыватель 20 переключает механизм переключателей 15. Цикл повторяется. Применение предлагаемого автоматического магнитного захвата Быченко для подъема и транспортирования нетарированных ферромагнитных грузов позволяет повысить надежность работы захвата путем введения магнитного демпфирования и автоматического введения запаса надежности. Формула изобретения Автоматический магнитный захват, содержащий корпус, подвижные магнитные блоки, механизм управления замыканием и размыканием магнитного потока и соединенный с подвижными магнитными блоками пружинный демпфер, шток которого соединен с подвеской для навешивания на крюк крана, отличающийся тем, что, с целью повышения надежности работы захвата при подъеме ферромагнитных грузов и быстродействия, корпус включает три прямоуголь/У
L
fui.l ных магнитопровода, жестко соединенных пластинами из немагнитного материала, в которых выполнены вертикальные направляющие пазы, в которых установлены с возможностью перемещения подвижные магнитные блоки из постоянных магнитов, сориентированные однополярно друг к другу и снабженные шпонками, причем средний магнитопровод выполнен со сквозным центральным вертикальным отверстием для установки пружинного демпфера и имеет активное сечение, равное сумме двух одинаковых сечений крайних магнитопроводов, а механизм управления замыканием и размыканием магнитного потока включает тросы, соединяющие подвижные магнитные блоки с втулкой пружинного демпфера и огибающие направляющие ролики, прикрепленные к корпусу над магнитными блоками, прикрепленные к корпусу двухтактные переключатели и блокировочные механизмы и закрепленные на тросах по два упора, взаимодействующие один с двухтактными переключателями, а другой с блокировочными механизмами. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 304811, кл. В 66 С 1/04, 1969. 2.Авторское свидетельство СССР № 413100, кл. В 66 С 1/04, 1970 (прототип) .
4-А
12
фиг.2
