Изобретение относится к грузоподъемным устройствам, в частности к грузозахватным устройствам на постоянных магнитах, и может быть использовано в различных устройствах для подъема и переноса ферромагнитных грузов.
Целью изобретения является расширение эксплуатационных возможностей путем обеспечения транспортировки грузов, размеры которых менее ширины магнитной системы.
На фиг,1 изобоажен поедлагаемый магнитный захват, общий вид ;на фиг.2-тожетвид снизу; на фиг.З - сечение А-А на фиг.2; на фиг.4 и 5 - конструкция механизма фиксации рычагов.
Магнитный захват содержит корпус 1 с размещенными в нем неподвижными магнитами, две пары рычагов 2 для отжатия корпуса 1 от груза 3, шарнирно соединенные с корпусом посредством осей 4. Все рычаги 2 установлены симметрично по обе стороны корпуса 1 с возможностью синхронного поворота в одну сторону. Концы 5 рычагов имеют скругление, обращенное в сторону транспортируемого груза. Рычаги 2, расположенные с одной стороны корпуса 1, шарнирно соединеньГобщим коромыслом
6,к которому шарнирно подсоединена тяга
7,связанная шарнирно с ползуном 8 механизма фиксации рычагов от поворота. Основание 9 ползуна жестко прикреплено к корпусу 1. Концы 5 каждой пары рычагов 2, закрепленных на противоположных сторонах корпуса, жестко соединены между собой стержнями 10, которые в сечении повторяют профиль скругления концов 5, а в корпусе предусмотрены пазы 11 для размещения стержней.
На фиг.2 пунктирной линией показано, как следует ориентировать по отношению к стержням, прикрепленным к рычагам, длинномерные грузы, размеры которых менее ширины магнитной системы.
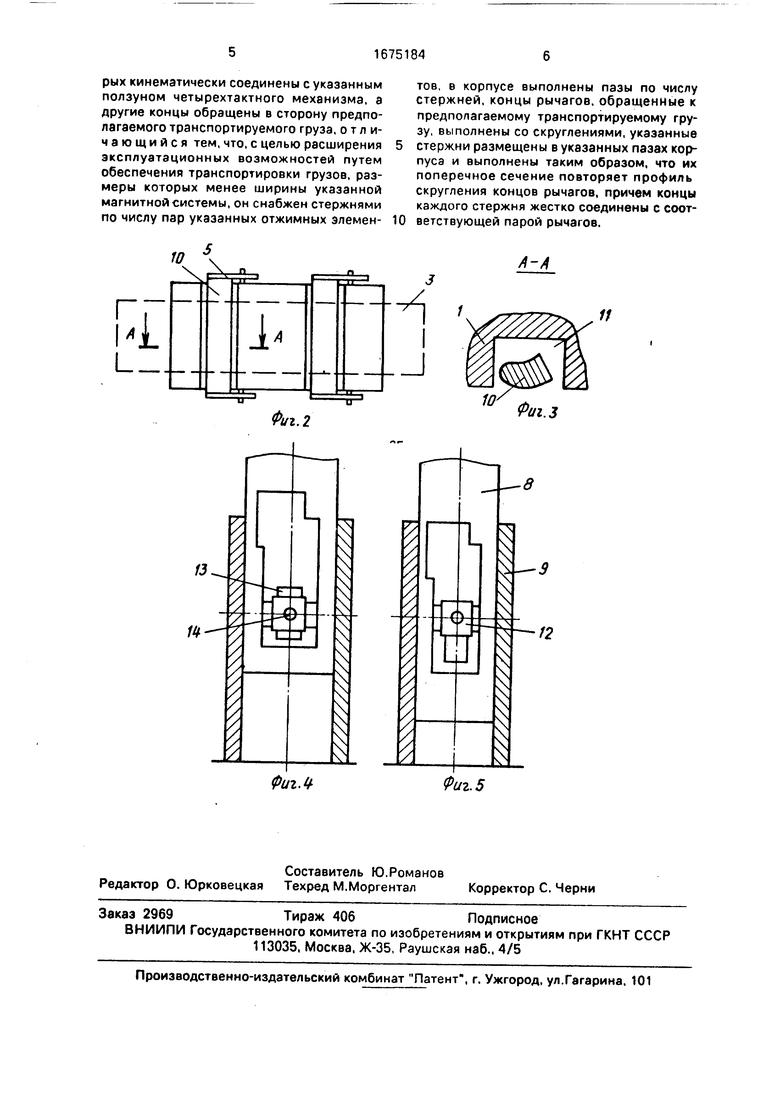
Механизм фиксации рычагов 2 от поворота (фиг.4 и 5), кроме основания 9 и ползуна 8, включает вертушку 12 квадратного сечения и перекладину 13, которые закреплены на общей оси 14, установленной горизонтально в стенках основания 9 с возможностью вращения. Вертушка 12 с перекладиной 13 при поворотах оси 14 на 90° могут занимать два различных фиксированных положения.
Захват работает следующим образом.
В исходном состоянии перекладина 13 занимает вертикальное фиксированное положение и установлена в нижней части паза ползуна 8 (фиг.4), который в данном случае занимает крайнее верхнее положение. В та
ком положении захват опускают на поверхность груза 3. Первыми касаются груза концы 5 рычагов 2, выступающие ниже основания корпуса 1. По мере опускания захвата на поверхность груза осуществляется синхронный поворот рычагов 2 и корпус
1опускается на поверхность груза. Ползун 8 опускается в крайнее положение и своим выступом во внутренней полости осуществ0 ляет при этом частичный поворот вертушки 12с перекладиной 13 на угол меньше 90°. Груз захватывается магнитной системой и при последующем подъеме захвата ползун 8 другим выступом во внутренней полости
5 осуществляет доворот вертушки 12 до угла 90°. Перекладина 13 занимает горизонтальное положение (фиг.5). Движение ползуна 8 останавливается, и он занимает фиксированное положение, при котором рычаги 2
0 наклонены, концы 5 рычагов 2 и стержни 10 не касаются поверхности груза, при этом стержни 10 размещаются в пазах 11. Втаком положении захваченный груз 3 переносится к месту разгрузки и опускается на разгру5 зочную площадку, после соприкосновения с которой ползун 8 опускается в крайнее положение и своим выступом во внутренней полости производит частичный поворот вертушки 12 и перекладины 13 на угол меньше
0 90°. При, последующем подъеме захвата ползун 8 доворачивает другим выступом вертушку 12 до угла 90°. При этом перекладина 13 занимает вертикальное фиксированное положение и входит при подъеме
5 ползуна 8 в паз в его нижней части. Рычаги
2при этом синхронно поворачиваются и при взаимодействии их концов 5 и стержней 10 с поверхностью груза 3 происходит отрыв его от корпуса 1. Ползун 8 занимает
0 крайнее верхнее положение (фиг.4). После освобождения от груза захват переносят к месту загрузки и опускают на поверхность очередного груза. В дальнейшем цикл работы повторяется.
5 Использование предлагаемого магнитного захвата обеспечивает более широкую номенклатуру транспортируемых длинномерных грузов.
Формула изобретения
0 Автоматический магнитный захват, содержащий ползун четырехтактного механизма фиксации с серьгой, предназначенной для установки на крюке крана, корпус с размещенной в нем магнит5 ной системой с постоянными магнитами и механизм отрыва, включающий в себя пары отжимных элементов, шарнирно закреплен- ные на противоположных сторонах корпуса, указанные отжимные элементы выполнены в виде двуплечих рычагов, одни концы которых кинематически соединены с указанным ползуном четырехтактного механизма, а другие концы обращены в сторону предполагаемого транспортируемого груза, отличающийся тем, что, с целью расширения эксплуатационных возможностей путем обеспечения транспортировки грузов, размеры которых менее ширины указанной магнитной системы, он снабжен стержнями по числу пар указанных отжимных элемен0
тов, в корпусе выполнены пазы по числу стержней, концы рычагов, обращенные к предполагаемому транспортируемому грузу, выполнены со скруглениями, указанные стержни размещены в указанных пазах корпуса и выполнены таким образом, что их поперечное сечение повторяет профиль скругления концов рычагов, причем концы каждого стержня жестко соединены с соответствующей парой рычагов.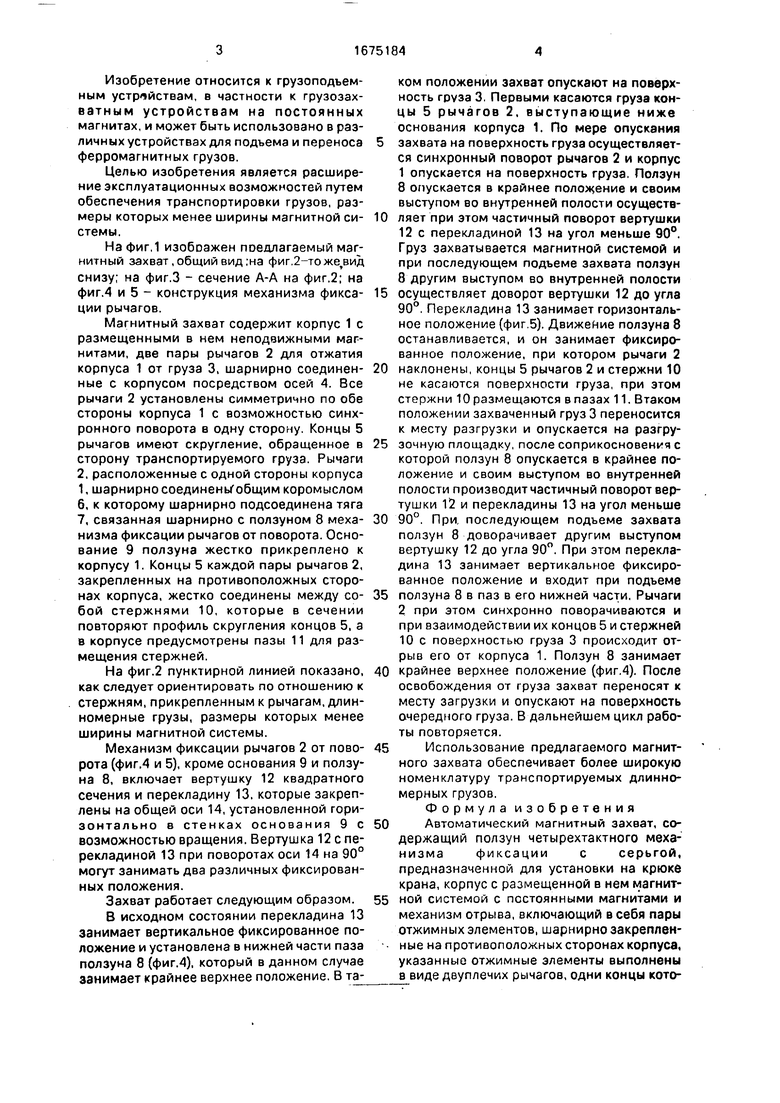
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический магнитный захват | 1987 |
|
SU1504196A1 |
| Автоматический магнитный захват | 1989 |
|
SU1705220A1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 1973 |
|
SU366145A1 |
| Автоматический захват для транспортировки штучных грузов | 1980 |
|
SU872431A1 |
| Грузозахватное устройство | 1986 |
|
SU1402537A1 |
| Грузозахватное устройство | 1991 |
|
SU1789490A1 |
| Грузозахватное устройство | 1989 |
|
SU1712301A1 |
| Пресс для вырубки изделий излиСТОВОгО и лЕНТОчНОгО МАТЕРиАлА | 1978 |
|
SU795648A1 |
| Устройство для вырубки заготовок из полосового и ленточного материала | 1979 |
|
SU856834A1 |
| ШВЕДСКАЯ СТЕНКА С БЛОЧНОЙ СИСТЕМОЙ | 2016 |
|
RU2641085C1 |
Изобретение относится к грузоподъемным устройствам, в частности к грузозахватным устройствам на постоянных магнитах, и может быть использовано в различных устройствах для подъема и переноса ферромагнитных грузов. Цель - расширение эксплуатационных возможностей путем обеспечения транспортировки грузов, размеры которых менее ширины магнитной системы. Автоматический магнитный захват содержит корпус 1 с магнитной системой с постоянными магнитами, четырехтактный механизм фиксации с ползуном 8 с серьгой, механизм отрыва вклю- чающий рычаги 2 с концами 5, взаимодействующими с грузом 3, коромысло 6, тягу 7. Достижение цели обеспечивается введением стержней, расположенных в пазах 11 корпуса и соединенных с концами 5 рычагов. 5 ил. 8 w V Ё ON V| СЯ 00 4 Фиг.1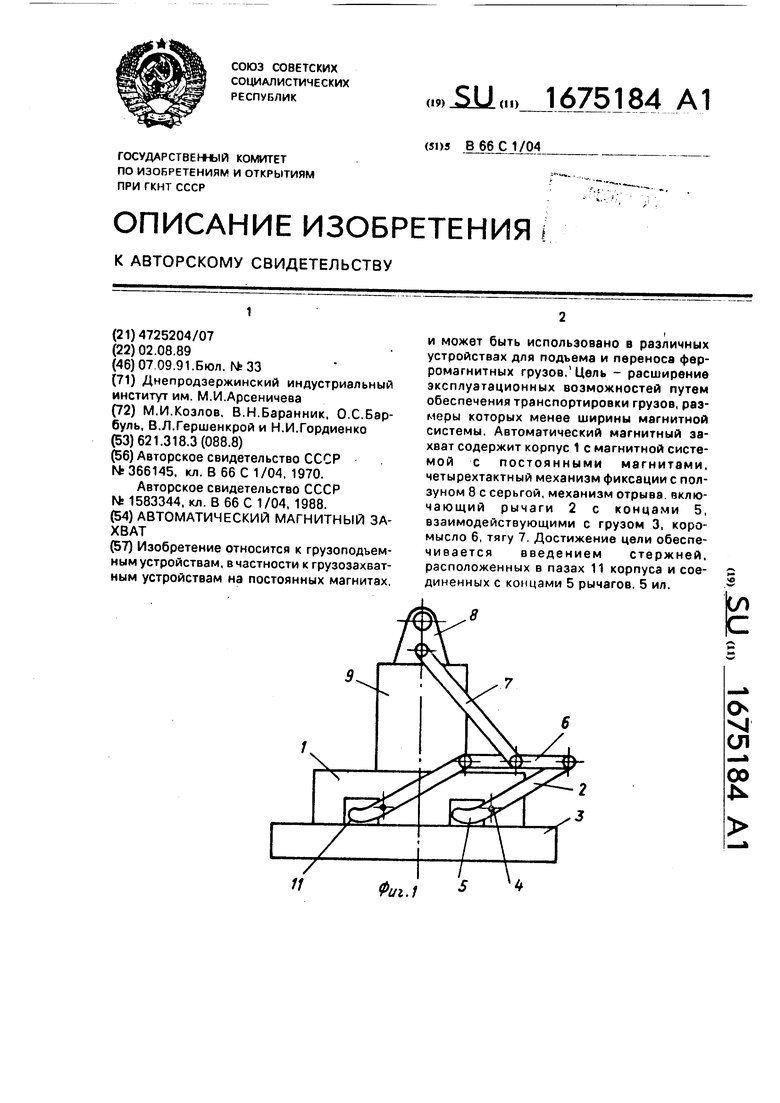
10
Фиг.2
ПА-А
Фиг.З
12
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 0 |
|
SU366145A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Автоматический магнитный захват | 1988 |
|
SU1583344A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
