1
(21)4227963/31-11
(22)13.04,87
(46) 07.12.89, Бюп. 45
(71)Симферопольский государственный университет им М,В. Фрунзе
(72)С.А. Самонов
(53)62К869 (088о8)
(56)Авторское свидетельство СССР 436776, кло В 65 G 47/38, 1972
(54)УСТРОЙСТВО ДЛЯ ТОРМОЖЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ НА НАКЛОННЫХ НАПРАВЛЯЮЩИХ
(57)Изобретение относится к промьпп- леиному транспорту, в частности к оборудовешию для транспортирования
изделий в технологических линиях различных производств. Цель изобретения - повышение надежности работы за счет саморегулирования усилия торможения о Устройство содержит вал с барабанами 1, на котором закреплены рычаги 2. На барабаны вала навиты гибкие тяги 3, прикрепленные к оси катка 4. Каток 4 установлен на неподвижные направляющие 5, представ- ляюрше собой закрепленные на раме секторы с выпуклыми криволинейными рабочими поверхностями, имеющими на концах стопорные упоры Секторы являются механизмом натяжения гибких тяг 3, 3 ил о
с 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения грузов | 1986 |
|
SU1507683A1 |
| Катальная машина для войлочного производства | 1927 |
|
SU20067A1 |
| Устройство для тренировки пловцов | 1988 |
|
SU1523154A1 |
| Устройство для переворачивания сыра во время его созревания | 1984 |
|
SU1232189A1 |
| Устройство включения ленточного пружинно-нагруженного нормально разомкнутого тормоза бензомоторной цепной пилы | 1984 |
|
SU1333242A3 |
| Укладчик покрытий | 1991 |
|
SU1794972A1 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ РАСКАЧИВАНИЯ ГРУЗОЗАХВАТНОГО ОРГАНА | 1993 |
|
RU2049038C1 |
| УСТРОЙСТВО КАТКА ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ МАШИН | 2011 |
|
RU2565295C2 |
| Роликовые коньки | 1980 |
|
SU1284573A1 |
| Подъемное устройство для монтажа длинномерных конструкций | 1975 |
|
SU575329A1 |
Изобретение относится к промышленному транспорту, в частности к оборудованию для транспортирования изделий в технологических линиях различных производств. Цель изобретения - повышение надежности работы за счет саморегулирования усилия торможения. Устройство содержит вал с барабанами 1, на котором закреплены рычаги 2. На барабане 1 вала навиты гибкие тяги 3, прикрепленные к оси катка 4. Каток 4 установлен на неподвижные направляющие 5, представляющие собой закрепленные на раме секторы с выпуклыми криволинейными рабочими поверхностями, имеющими на концах стопорные упоры. Секторы являются механизмом натяжения гибких тяг 3. 3 ил.
-
Изобрете ше относится к промьшлен ному транспорту, а именно к оборудованию Д.Г1Я транспортирования изделий в технологических линиях различных производство
Цель изобретения - повышение надежности устройства в работе за счет саморегулирозания усилия торможения о
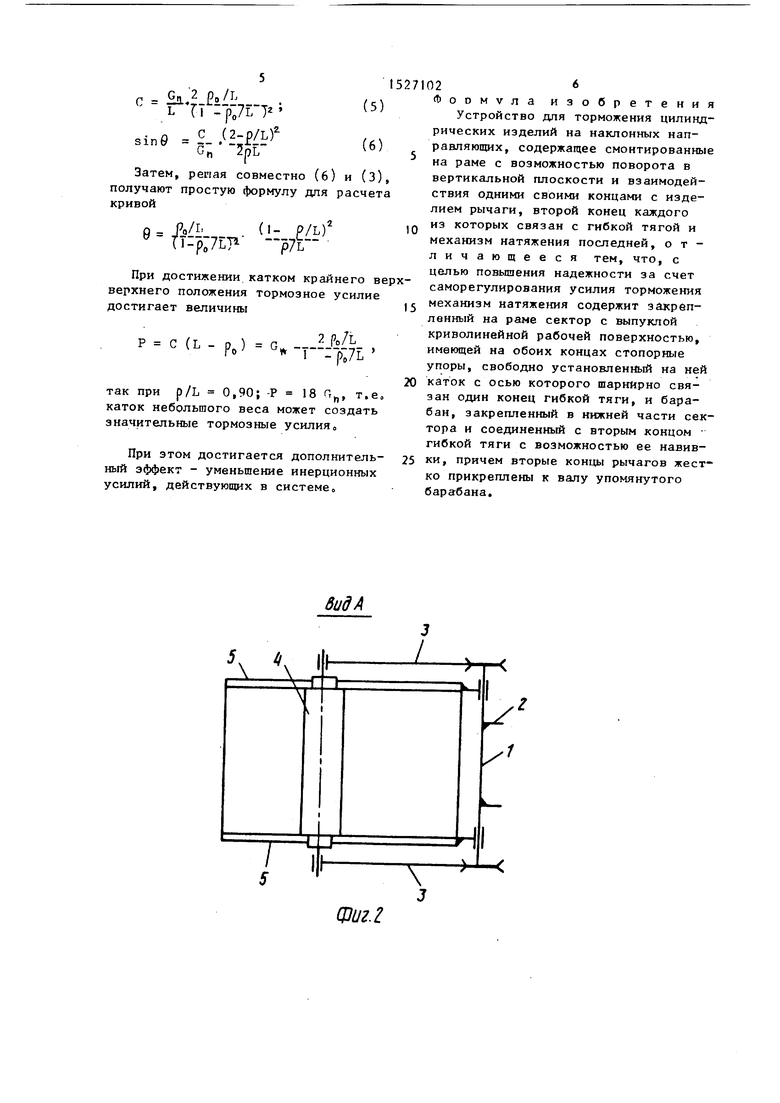
На фиг,1 показана конструктивная схема устройства; на - вид А н фиг.1; на фиг.З - расчетная схема и действие сил.
Устройство для торможения изделий состоит из вала с барабанами 1, на котором закреплены рычаги 2 На барабаны вгша навиты гибкие тяги 3, которые своими концами шарнирнг крепятся к оси катка 4, представляющего из себя массивное цилиндрическое тело. Каток 4 установлен на неподвижные криволинейгые направляющие 5 с возможностью качения по ним под действием тяг 3. Устройство смонтировано на раме 6. Направляюгдие 5 представляют собой секторы с выпуклыми рабочими поверхностями, имеюпщми стопорные упоры по концам, и являются механизмом натяжения тяг 3.
Устройство работает следующим об- разом.
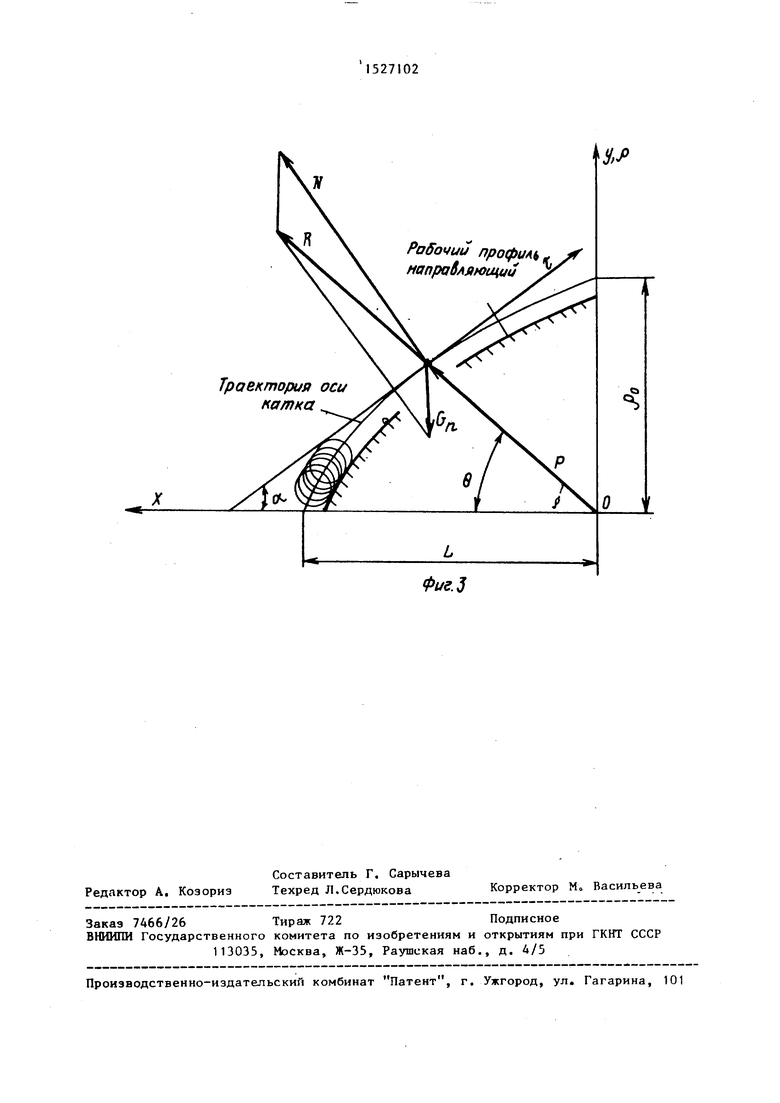
В исходном положении рычаги 2 нах ходятся в вертикальном положении, тяги 3 не натянуты и каток 4 находится в крайнем нижнем положении на направляюа(их 5 о При движении изделия по склизу или рольгангу оно задевает рычаги 2 и поворачивает их на угол, завися1дий от высоты изделия Поворот рычагов приводит к наматыванию тяг 3 на барабаны вала и подъему катка 4 по направляюгцим 5 о При этом на тяги 3 со стороны катка действуют равнодействующая R, сила веса кат- ка G и давление N на него со стороны плоскости направляющих 5,
При этом, если провести через точку захода тяг на барабаны вертикальную полярную ось и обозначить
расстояние от точки захода до оси вращения катка р , угол между направлением тяги и полярной осью 9 , можно составить уравнение равновесия катка в предположении, что его масса сосредоточена в точке при его нахождении в произвольном положении на направляющих под действием.силы Р натяжения тяги.
Уравнение в проекции на касательную L к кривой траектории его оси (фиг.З) имеет вид
PC OS ( оЛ + 0 ) G sin л,
(I)
где oi - угол наклона касательной к
горизонтальной оси. Для того, чтобы тормозное усилие было пропорционально габаритам изделия, необходимо выполнить следующие условия
(2)
Р - К - C{L - р),
где С - коэффициент жесткости;
L - полярный радиус, определящий крайнюю нижнюю точку траектории оси катка,
т.е величина тормозного усилия (натяжения тяг) пропорциональна изменению длины тяг или углу поворота рычагов и вала с барабанамио
Решая совместно (2) и (З), а также учитывая известные и з дифференциальной геометрии соотношения между Р и 9 и параметрами кривой р(9), описывающей траекторию оси катка, получают следующее дифференциальное уравнение
§;; b-p - Pd-fce
(3)
После интегрирования получают уравнение
8
if - Г
+ с
(4)
.. .,
0
5
где С. - производная постоянная о Исходя из значения жесткости, кратного величины Gn/L, можно построить траекторию перемещения оси катка. Для нахождения рабочего профиля направляющих необходимо построить огибающую семейства окружностей, центры которых лежат на траектории, а диаметры равны диаметру катка 4 (фиг.З).
Дпя расчета кривой профиля используют следующее.
Например, в крайней верхней точке траектории р ро S 90 , исходя из из этих условий, по формуле (1) вычисляют жесткость
1
2
Sin
2 „/1 L Г
д С (2-p/Lf У - . ,С„ -2pL
Затем, реиая совместно (б) и (З), получают простую формулу для расчета кривой
о- Ро/Ь(I- P/L)
- ГТ:р:7ьТ1 -77L
При достижении катком крайнего верх- верхнего положения тормозное усилие достигает величины
Р С (L - pj G,
2 po/L Л
так при P/L 0,90; -Р 18 Гт, т.е. каток небольшого веса может создать значительные тормозные усилия
При этом достигается дополнительный эффект - уменьшение инерционных усилий, действующих в системе
10
рх-
1527102
Фоомула изобретения Устройство для торможения цилиндрических изделий на наклонных направляющих, содержащее смонтированные на раме с возможностью поворота в вертикальной плоскости и взаимодействия одними своими концами с изделием рычаги, второй конец каждого из которых связан с гибкой тягой и механизм натяжения последней, отличающееся тем, что, с целью повьппения надежности за счет саморегулирования усилия торможения механизм натяжения содержит закрепленный на раме сектор с выпуклой криволинейной рабочей поверхностью, имеющей на обоих концах стопорные упоры, свободно установленный на ней каток с осью которого шарннрно связан один конец гибкой тяги, и барабан, закрепленный в нижней части сектора и соединенный с вторым концом гибкой тяги с возможностью ее навивки, причем вторые концы рычагов жест ко прикреплены к валу упомянутого барабана.
15
20
25
фиг. 2
Фиг.З
