1 tx
ff4f
JJ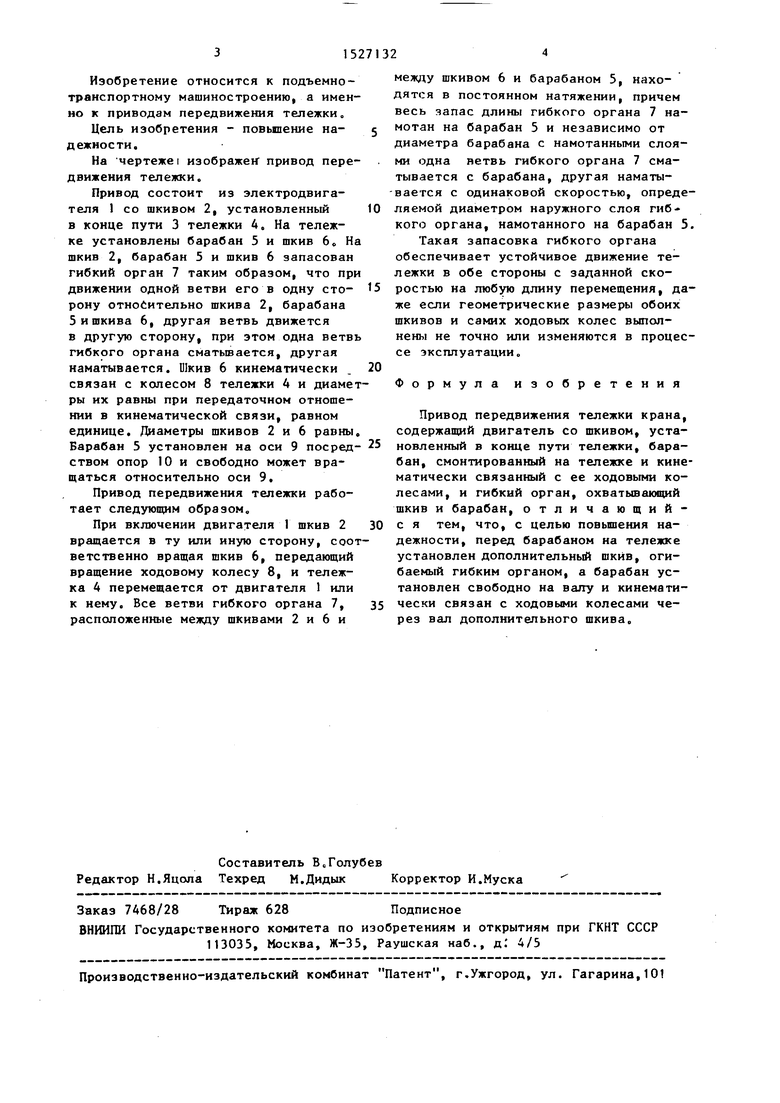
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод передвижения тележки | 1980 |
|
SU901243A1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ПЕРЕДВИЖЕНИЯ ГРУЗА | 2001 |
|
RU2194005C2 |
| Подъемно-транспортное устройство | 1976 |
|
SU912624A1 |
| Устройство для замены ленты на конвейере | 1978 |
|
SU941251A1 |
| Привод передвижения тележки (его варианты) | 1980 |
|
SU1044585A1 |
| Устройство для замены ленты на конвейере | 1980 |
|
SU939342A1 |
| ГРУЗОПОДЪЕМНАЯ ТЕЛЕЖКА С КАНАТНОЙ ТЯГОЙ | 2005 |
|
RU2288163C1 |
| Устройство для подвода энергии к колесной тележке | 1985 |
|
SU1379236A1 |
| Устройство для удлинения транспортных средств с замкнутым тяговым канатом | 1983 |
|
SU1263882A1 |
| Грузовая тележка для крана мостового типа | 1975 |
|
SU517554A1 |
Изобретение относится к подъемно-транспортному машиностроению, а именно к приводам передвижения тележек. Цель изобретения - повышение надежности. Привод передвижения тележки 4 содержит электродвигатель 1 со шкивом 2, установленный в конце пути тележки, барабан 5, установленный на тележке 4, и гибкий орган 7, намотанный на шкив 2 и барабан 5. Между шкивом 2 и барабаном 5 на тележке 4 установлен дополнительный шкив 6, огибаемый гибким органом 7. Барабан 5 установлен свободно на оси 9, а кинематическая связь на колеса 8 тележки 4 осуществляется от дополнительного шкива 6. 1 ил.
r
Изобретение относится к подъемно- транспортному машиностроению, а именно к приводам передвижения тележки.
Цель изобретения - повьшение на- дежности.
На чертеже изображен привод передвижения тележки.
Привод состоит из электродвигателя 1 со шкивом 2, установленный в конце пути 3 тележки А. На тележке установлены барабан 5 и шкив 6, На шкив 2, барабан 5 и шкив 6 запасован гибкий орган 7 таким образом, что при движении одной ветви его в одну сто- рону относительно шкива 2, барабана 5 и шкива 6, другая ветвь движется в другую сторону, при этом одна ветвь гибкого органа сматьшается, другая наматывается. Шкив 6 кинематически связан с колесом 8 тележки А и днамет ры их равны при передаточном отношении в кинематической связи, равном единице. Диаметры шкивов 2 и 6 равны. Барабан 5 установлен на оси 9 посред- ством опор 10 и свободно может вращаться относительно оси 9,
Привод передвижения тележки работает следующим образом.
При включении двигателя 1 шкив 2 вращается в ту или иную сторону, соответственно вращая шкив 6, передающий вращение ходовому колесу 8, и тележка 4 перемещается от двигателя 1 или к нему. Все ветви гибкого органа 7, расположенные между шкивами 2 и 6 и
между шкивом 6 и барабаном 5, находятся в постоянном натяжении, причем весь запас длины гибкого органа 7 намотан на барабан 5 и независимо от диаметра барабана с намотанными слоями одна ветвь гибкого органа 7 сматывается с барабана, другая наматы- -вается с одинаковой скоростью, определяемой диаметром наружного слоя гибкого органа, намотанного на барабан 5,
Такая запасовка гибкого органа обеспечивает устойчивое движение тележки в обе стороны с заданной скоростью на любую длину перемещения, даже если геометрические размеры обоих шкивов и самих ходовых колес выполнены не точно или изменяются в процессе эксплуатации.
Формула изобретения
Привод передвижения тележки крана, содержащий двигатель со шкивом, установленный в конце пути тележки, барабан, смонтированный на тележке и кинематически связанный с ее ходовыми колесами, и гибкий орган, охватывакиций шкив и барабан, отличающий- с я тем, что, с целью повьш1ения надежности, перед барабаном на тележке установлен дополнительный шкив, огибаемый гибким органом, а барабан установлен свободно на валу и кинематически связан с ходовыми колесами через вал дополнительного шкива.
| Привод передвижения тележки (его варианты) | 1980 |
|
SU1044585A1 |
