1
1455062
i Изобретение относится к машинострое- Ыю, в частности к пневмогидравличес- ким приводам, и может быть применено в промышленных роботах и станках с программным управлением.
Цель изобретения - повышение надежности и улучшение динамических характеристик.
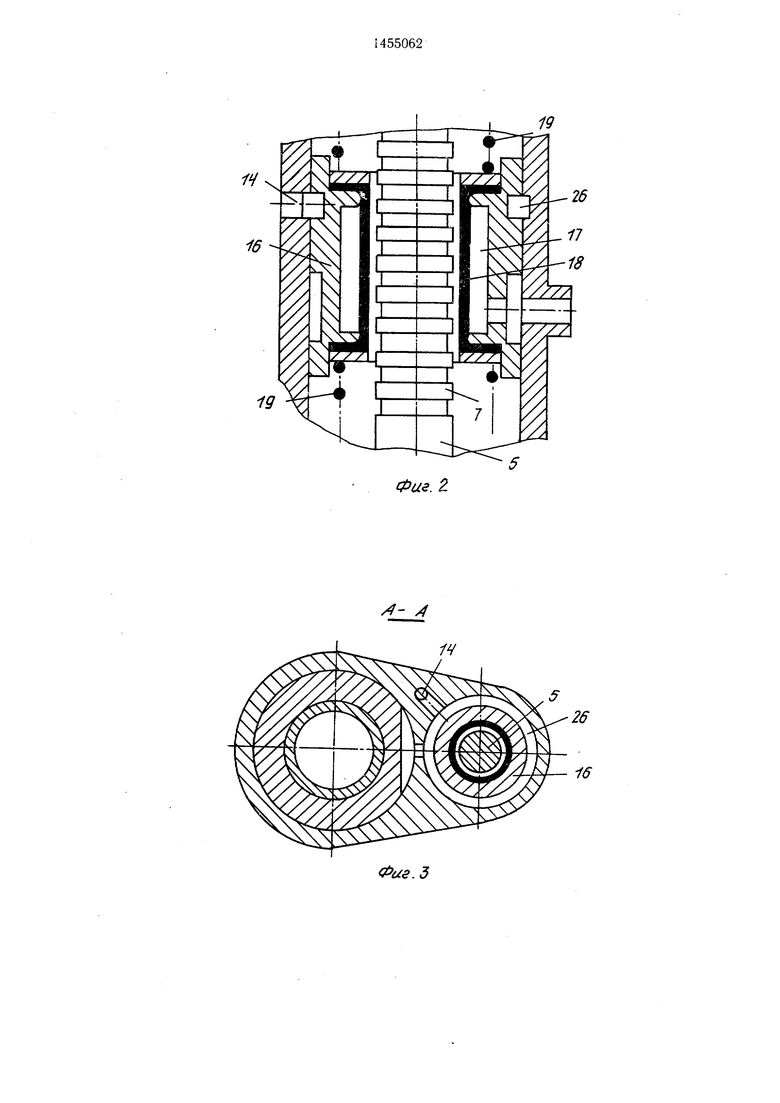
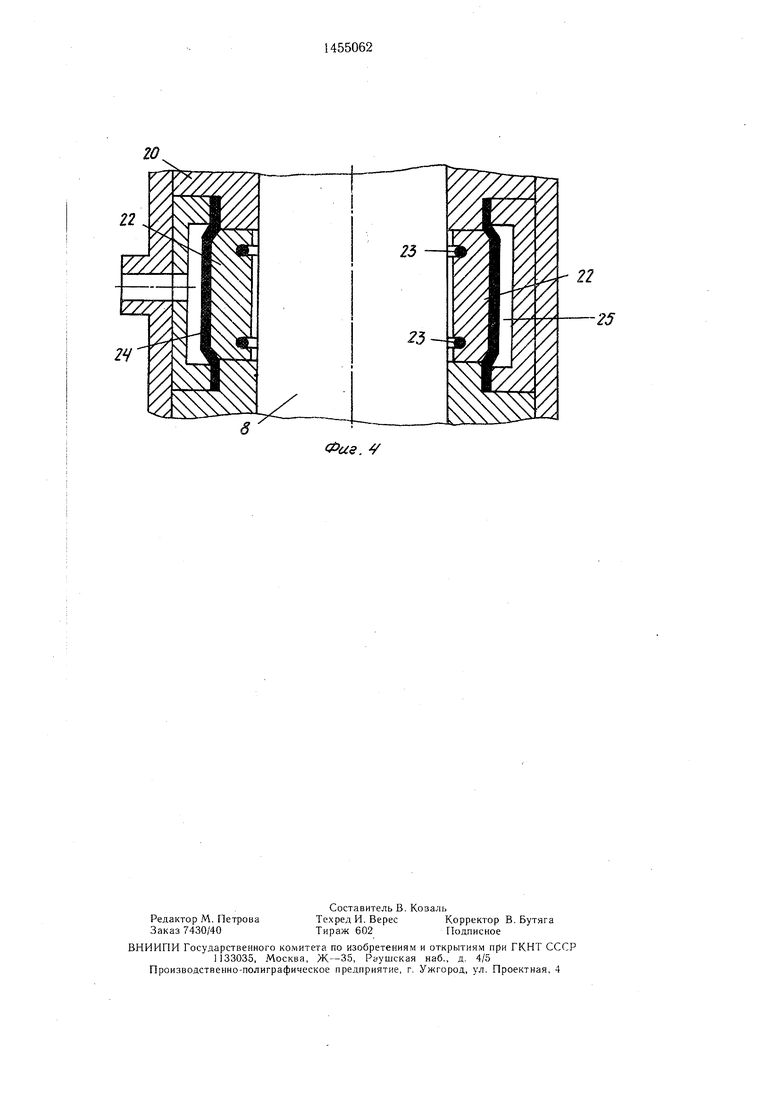
На фиг. 1 представлена принципиальная схема привода; на фиг. 2 - устройство управляемого золотника; на фиг. 3 - сечение А-А на фиг. 1; на фиг. 4 - устройство управляемого пневмофиксатора. I Моментный позиционный пневмогидро- |привод содержит цилиндр 1 с установленным в нем поршнем 2 с образова- |нием рабочих полостей 3 и 4, элемент I фиксации, выполненный в виде подвижного I штока 5, жестко связанного с поршнем 2, iпредотврашая поворот последнего относительно оси 6 цилиндра 1. Шток 5 имеет рельефную поверхность 7. С поршнем 2 жестко связан шток 8, внутри которого размеш,ен выходной вал 9. Последний кинематически связан с поршнем 2 посредством шариковинтового механизма 10. Кроме того, привод содержит гидравлическое демпфирующее устройство, включаюш,ее поршень 11, образующий с цилиндром 1 полости 12 и 13, соединенные между собой перепускным каналом 14, на котором в цилиндрической расточке 15 цилиндра 1 установлен золотник 16 с управляющей пневмо- камерой 17 и эластичной стенкой 18. В расточке 15 также размещены возвратные пружины 19, обеспечивающие стабилизацию золотника 16 в нейтральном положении. В крышке 20 (фиг. 1 и 4) размещен пневмофиксатор 21, содержащий сегментные обкладки 22, подпружиненные со стороны штока 8 кольцами. , 23 и размещенные внутри эластичной манжеты 24, установленной в крышке 20 с образованием управляющей камеры 25. На золотнике 16 выполнена кольцевая проточка 26.
Моментный позиционный пневмогидро- привод работает следующим образом.
Выходной вал 9 приводится во вращение при подаче рабочей среды в одно из полостей, например 3. Жестко соединенные между собой порщень 2, штоки 5 и 8 и поршень 11 перемешаются вниз (фиг. 1). При этом жидкость из полости 12 через перепускной канал 14 и кольцевую проточку 26 золотника 16 (фиг. 1 и 3) вытесняется в полость 13. В заданной точке начала демпфирования воздух под давлением подается в управляющую пневмока- меру 17 золотника 16 (фиг. 2). При этом эластичная стенка 18 входит в контакт с рельефной поверхностью 7 штока 5, что приводит к фиксации золотника 16 на
0
5
0
5
30
35
40
45
50
штоке 5. При их совместном перемещении происходит.дросселирование канала 14, что приводит к уменьшению скорости перемещения штока 8 и скорости вращения вала 9. Позиционирование выходного вала 9 происходит с помощью пневмофиксатора 21. В этот момент скорость вращения вала 9 минимальна, усилие и инерционная нагрузка ведомого звена, приложенная к валу 9, в значительной степени компенсируются гидравлическим демпфирующим устройством. Воздух под давлением подается в управляющую камеру 25 пневмофиксатора 21 (фиг. 4). При этом сегментные обкладки 22 прижимаются к поверхности щтока 8, фиксируя его относительно цилиндра 1.
При сбросе давления из камеры 25 и камеры 17 обкладки 22 под действием пружинных колец 23 освобождают шток 8, а золотник 16 под действием одной из пружин 19, сжатой в процессе демпфирования, возвращается в нейтральное положение, от-крывая канал 14, и вал 9 продолжает движение.
Таким образом, устройство пневмогидро- привода позволяет осуществлять изменение скорости перемещения выходного вала 9 по определенному закону, осуществлять его позиционирование в любых заданных положениях диапазона возможного перемещения, что значительно улучщает динамические характеристики и расщиряет эксплуатационные возможности привода данного типа. Простота устройства привода, статически уравновешенного золотника 16, обладающего малой массой, и наличие пневмофиксатора 21, с помощью которого осуществляется окончательное позиционирование выходного вала 9, повыщают надежность и точность его позиционирования.
Формула изобретения
Моментный позиционный пневмогидро- привод,. содержащий цилиндр с установленными в нем порщнем с элементом фиксации от поворота вокруг оси цилиндра и выходным валом, кинематически связанным с поршнем посредством шариковинтового механизма, отличающийся тем, что, с целью повышения надежности и улучшения динамических характеристик, привод дополнительно снабжен гидравлическим устройством, выполненным в виде золотника с эластичной стенкой, установленного в цилиндре с образованием управляющей пневмокамеры, а элемент фиксации выполнен в виде подвижного штока с рельефной поверхностью, жестко соединенного с поршнем с возможностью взаимодействия с эластичной стенкой.
i9
19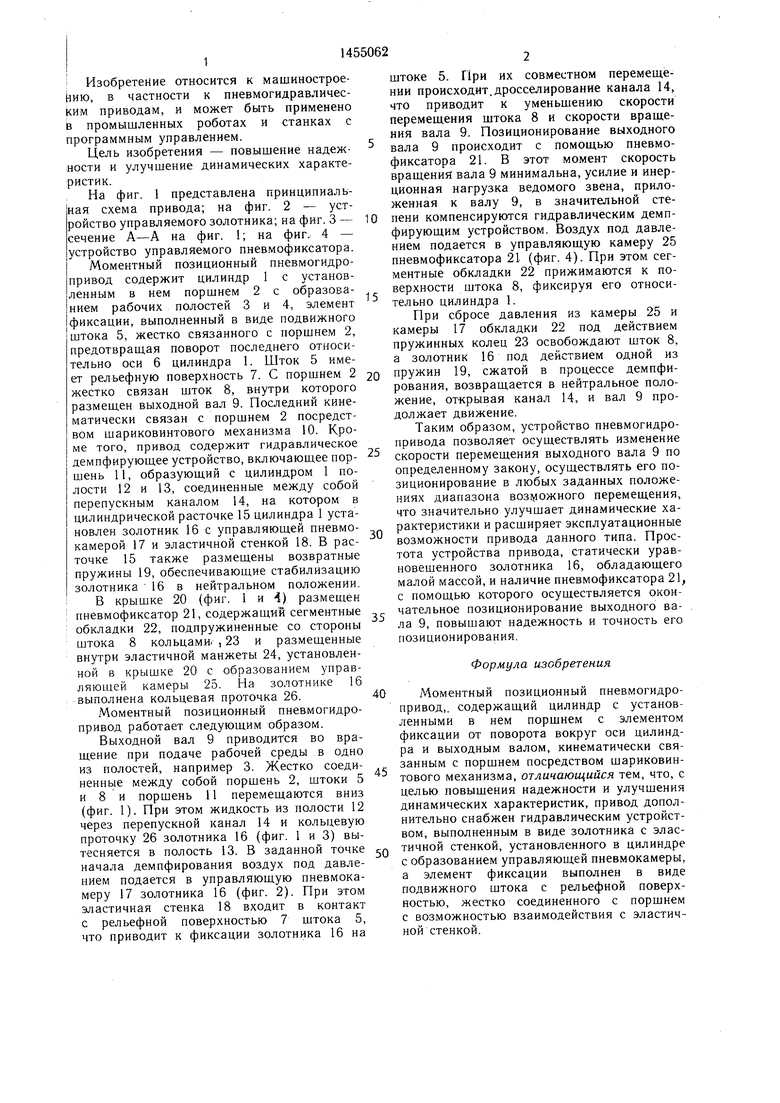
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционный пневмогидропривод | 1985 |
|
SU1273656A1 |
| Следящий позиционный пневмогидропривод | 1988 |
|
SU1527420A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Тормозное устройство | 1989 |
|
SU1739134A1 |
| Пневмогидравлический следящий привод | 1980 |
|
SU876376A2 |
| Позиционный следящий привод | 1986 |
|
SU1399522A1 |
| Пневмогидравлический цифровой позиционный привод | 1981 |
|
SU1021827A1 |
| Позиционный пневмогидропривод | 1987 |
|
SU1481509A1 |
| Следящий позиционный привод | 1987 |
|
SU1511471A1 |
| Модуль манипулятора | 1987 |
|
SU1512763A1 |
Изобретение м. б. использовано в промышленных работах и станках с программным упраблением. Цель изобретения - AV повышение надежности и улучшение динамических характеристик пневмогидропривода. В цилиндре 1 установлены поршень 2 с элементом фиксации от поворота вокруг оси цилиндра 1 и выходной вал 9. Вал 9 кинематически связан с поршнем 2 посредством шариковинтового механизма 10. Гидравлическое демпфирующее устр-во включает золотник 16 с эластичной стенкой, к-рый установлен в цилиндре I с образованием управляющей пневмокамеры. Элемент фиксации выполнен в виде подвижного штока 5 с рельефной поверхностью. Шток 5 жестко соединен с пор шнем 2 с возможностью взаимодействия с эластичной стенкой. В крышке 20 размещен пневмофиксатор 21, с помощью к-рого происходит позиционирование вала 9 в любых заданных положениях диапазона перемещения. 4 ил. S (Л NU СП сд о 05 to
Фиг.г
/}-
14
Фие.5
12
Физ.
| Устройство для преобразования возвратно-поступательного движения поршней в направленное непрерывное вращение выходного вала | 1975 |
|
SU734429A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
