гг
С7//г/
см
Изобретение относится к механизмам для направления резака в машинах для кислпродпой резки.
Известно устройство для резки круглых ш:и эллиптических отверстий в цилиндрах и трубах изнутри, в котором зависимость между врапштельным движением и осевым движением направляющего кронштейна достигается при номоши составного механизма и, таким образом, контур резания можно изменить только изменением отношения нлеч рычага. Перенастройка устройства на обработку поверхностей с различными формами требует точной и утомительной наладочной работы. Кроме того, устройство нельзя использовать для резки труб.
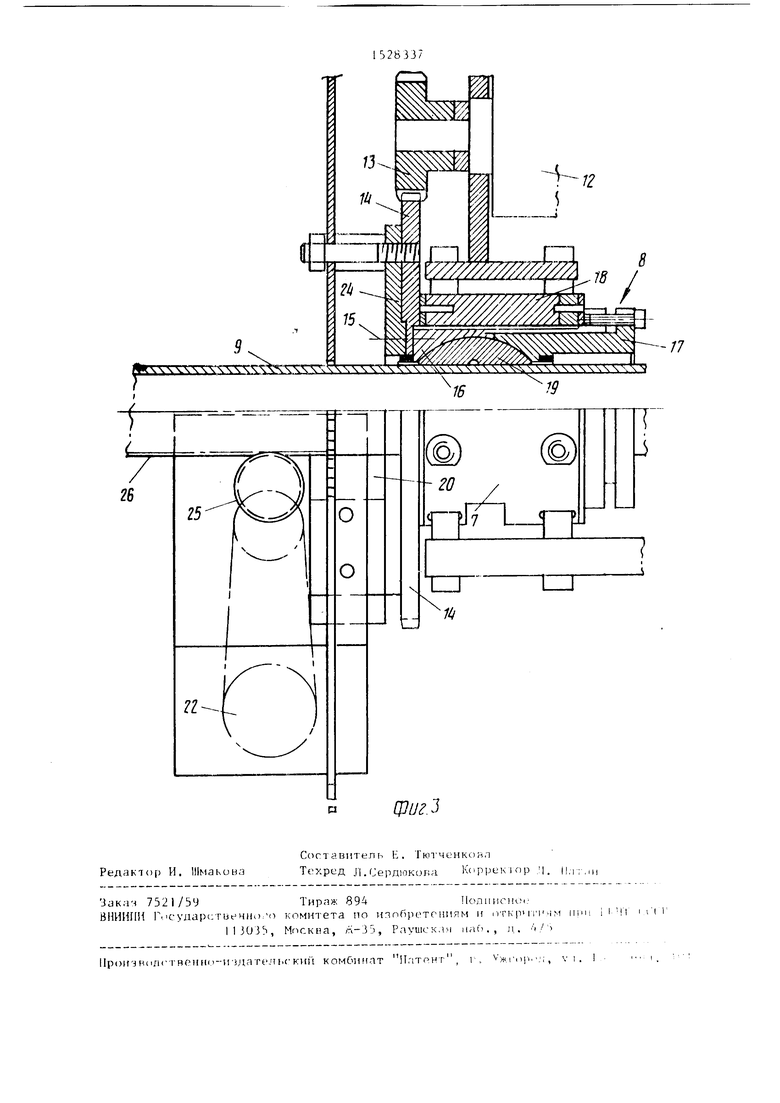
Несущая секция 7 снабжена управляемым приводом 12 вращения, например шаговым или двигателем посю- яиного тока. Привод 12 приводит во вращение ведущую шестерню 13, которая находится в зацеплении с зубчатым ободом ведомой шестерни 14, установленной при помощи подшипника 8 па основании {фиг. З). Винты 15, разнесенные по зубчатому венцу, окружающему вал 9, служат для прикрепления ведомой шестерни 14 к секции
16.Эта секция, в свою очередь, прикреплена винтами к другой половине
17.Поверхности, примыкающие к основанию секции 18, покрыты соответствующим скользящим несуишм материалом. Таким образом, секции 16 и 18 вместе
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕНОСНОЕ УСТРОЙСТВО ДЛЯ КИСЛОРОДО-АЦЕТИЛЕНОВОЙ РЕЗКИ | 1973 |
|
SU395199A1 |
| Устройство для вырубки заготовокиз лиСТОВОгО МАТЕРиАлА | 1978 |
|
SU795962A2 |
| Устройство для кислородной резки цилиндрических заготовок | 1979 |
|
SU789252A1 |
| Устройство для вырубки заготовок из плоского материала | 1983 |
|
SU1107933A1 |
| СТАНОК ДЛЯ РЕЗКИ ТРУБ | 2003 |
|
RU2242333C1 |
| Устройство для вырубки заготовок из плоского материала | 1984 |
|
SU1234003A1 |
| Устройство для гибки петли из проволоки | 1989 |
|
SU1745397A1 |
| Каретка А.С.Кривовязюка к устройству для вырубки заготовок из плоского материала | 1983 |
|
SU1114485A1 |
| Механизм расстановки свечей | 1990 |
|
SU1789011A3 |
| КОРОБКА ПЕРЕДАЧ | 1991 |
|
RU2017034C1 |
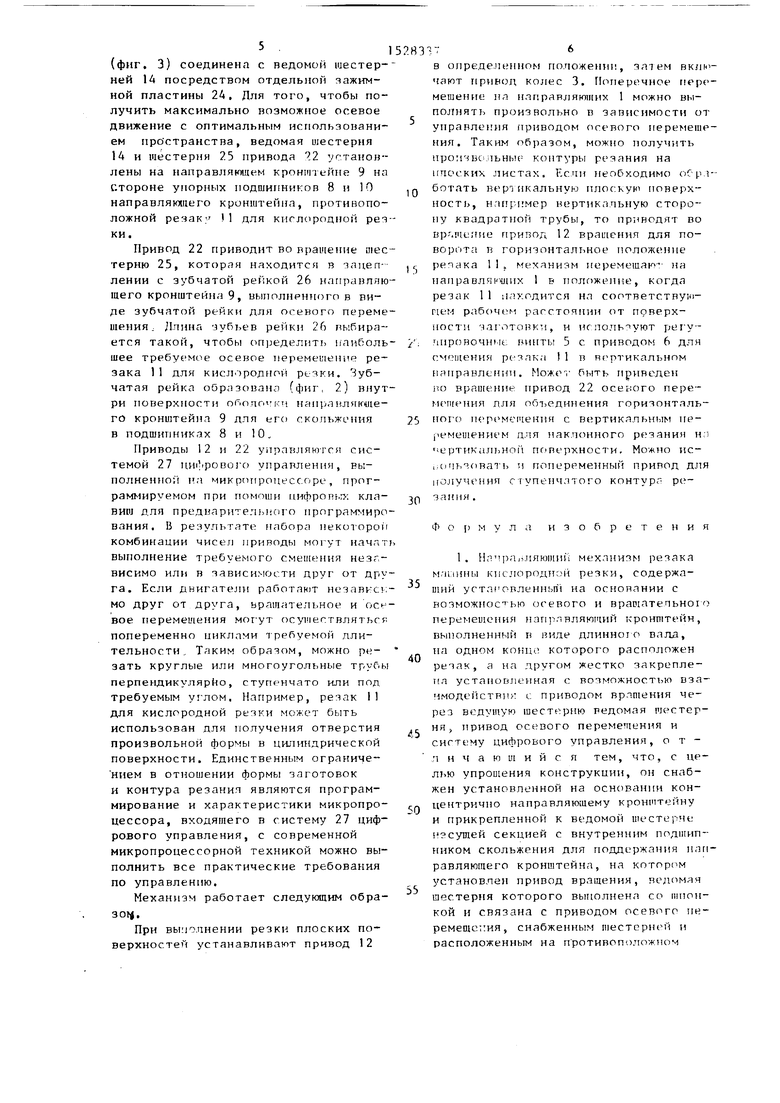
Изобретение относится к механизмам для направления резака в машинах для кислородной резки. Цель изобретения - упрощение конструкции. Резак 11 для кислородной резки закреплен на конце направляющего кронштейна 9, выполненного в виде длинного вала. Направляющий кронштейн 9 имеет возможность осевого перемещения и вращения вокруг своей оси. Приводы 12 и 22 управляются системой цифрового управления. В направляющем кронштейне 9 установлена зубчатая рейка, взаимодействующая с шестерней 25 привода 22 осевого перемещения, а на поверхности кронштейна 9 выполнена канавка, в которой перемещается шпонка 20 ведомой шестерни 14, взаимодействующей с приводом 12 вращения через ведущую шестерню 13. Направляющий механизм позволяет резать круглые или многоугольные трубы перпендикулярно, ступенчато или под требуемым углом. 3 з.п. ф-лы, 3 ил.
Известно также устройство для рез- 2Q образуют подщиппик скольжения, поз3CI
35
ки, в котором паправляюший механизм выполнен в виде подвгекного основания с несущей секцией и направляющим кронщтейном, установленным с возможностью регулировки его высоты. Пап- 25 равляющ1ш кронштейн выполнен полым и установлен с возможностью вращения и осевого перемещения. Привод обеспечивает любую комбинацию движений. Недостатком устройства является сложность конструкции.
Целью изобретения является упрощение конструкции.
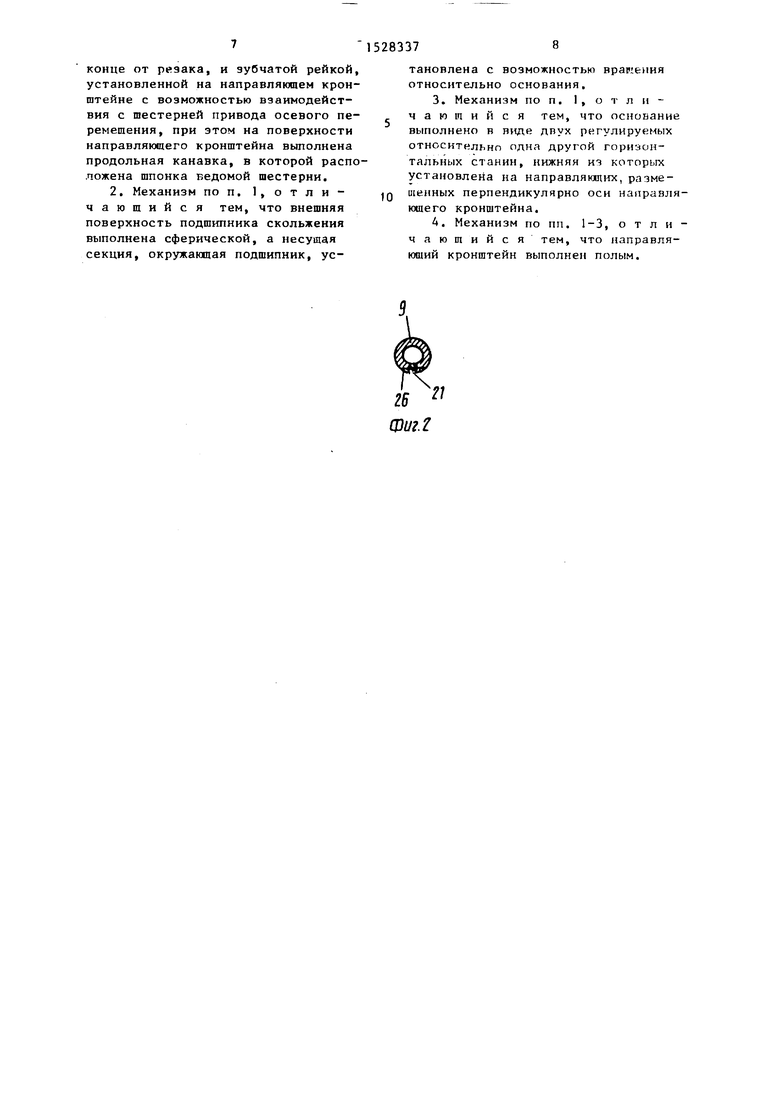
На фиг. 1 показан направляющий механизм; на фиг. 2 - нанравляющий кронштейн, поперечный разрез; на фиг. 3 - детали механизма (часть из них в осевом разрезе).
На направляющих 1 устаиовлено основание, выполненное в виде станины 2, которая перемещается на колесах 3 и песет иа себе станину.4 с регули1эовочными пинтами 5 о Трос, цепь ичи аналогичный нривод 6 может быть использовап для вращения винтов 5 для регулировки высоты станины 4. Последняя имеет цилиндрическую несущую секцшо 7, снабженную внутренним подшипником 8 скольжения для поддержания направляю01его кронштейна 9, и подшипник 10, через который проходит паправляющий кронштейн 9. Последний содержит длинный вал, предпочтительно полую трубу, и может . вращаться в подшипниках 8 и 10, а также скользить в осевом направлении. 55 Свободный коней направляющего кронштейна 9 снлбжен резаког- 1 для кислородной реяки:
40
45
50
воляющий осуществлять вращение секции 16. Таким образом, ведомая щес- терня 14 установлена на основании с возможностью вращении. Для того, чтобы возможные отклонения направляющего кронштейна 9 не мещали его осевому перемещепию через подщип- ник 8, внутренняя часть секций 16 и 17 снабжена втулкой 19 подшипника, впешпяя поверхность которой образует сферический подшипник для компенсации возможных отклонений направляющего кронштейна 9, когда он проходит через подщиппик 8, Таким образом, направляющий крощтейн 9 скользит в осевом направлении по внутренней поверхности несущей секции.
На ведомой шестерне 14 установлена шпонка 20, кромКа которой находится в скользящем зацеплении с продольной канавкой 21, проходящей по направляюи1ему кронштейну 9. Если ведомая щестерня 14 вращается, вместе с ней вращается направляющий крон- 9. Одновременно последний может перемещаться в осевом направлении.
Для осевого движения направляющего кронштейна 9 предусмотрен другой управляемый привод 22 осевого переме щения (шаговый двигатель или двигатель постоянного тока), соединенный с ведомой шестерней 14 для совместного вращения с направляюьчим кронщтейном 9. Соединение может быть осуществлено при помощи отдельной зажимной пластины 23 (фиг. 1), а также при помощи шпонки 20, которая
CI
5
5
5
0
5
0
воляющий осуществлять вращение секции 16. Таким образом, ведомая щес- терня 14 установлена на основании с возможностью вращении. Для того, чтобы возможные отклонения направляющего кронштейна 9 не мещали его осевому перемещепию через подщип- ник 8, внутренняя часть секций 16 и 17 снабжена втулкой 19 подшипника, впешпяя поверхность которой образует сферический подшипник для компенсации возможных отклонений направляющего кронштейна 9, когда он проходит через подщиппик 8, Таким образом, направляющий крощтейн 9 скользит в осевом направлении по внутренней поверхности несущей секции.
На ведомой шестерне 14 установлена шпонка 20, кромКа которой находится в скользящем зацеплении с продольной канавкой 21, проходящей по направляюи1ему кронштейну 9. Если ведомая щестерня 14 вращается, вместе с ней вращается направляющий крон- 9. Одновременно последний может перемещаться в осевом направлении.
Для осевого движения направляющего кронштейна 9 предусмотрен другой управляемый привод 22 осевого перемещения (шаговый двигатель или двигатель постоянного тока), соединенный с ведомой шестерней 14 для совместного вращения с направляюьчим кронщтейном 9. Соединение может быть осуществлено при помощи отдельной зажимной пластины 23 (фиг. 1), а также при помощи шпонки 20, которая
5
(фиг, 3) соединена с недомой шестерней 1А посредством отдельной яажим- ной пластины 24, Для того, чтобы получить максимально вoзмoжfIoe осевое движение с оптимальным использованием пространства, ведомая шестерня 14 и шестерня 25 привода .2 установлены на направляющем кронипеппе 9 на г.тороне упорных подшипников 8 и 10 направлякхиего кронштейна, противоположной резак, II для кпглородной рея ки.
Привод 22 приводит во вращение шестерню 25, которая находится в зацеплении с зубчатой рейкой 26 направляющего кронштейна 9, ВЫПОЛНРНТЮГО в виде зубчатой рейки для осевого перемещения, /1лина зубьев рейки 26 г Ь бира- ется такой, чтобы oпlJeдeлнть наибольшее требуемое осевое перемеьчепие резака 11 для кислородной резки. Зубчатая рейка образована (фиг, 2) внутри поверхности оболочки напранляртше- го кронштейна 9 для его скольжи ния в подшипниках 8 и 10,
Приводы 12 и 22 управляются системой 27 пи1:фово1-о управлении, вы- нолненпо; на микропроцессоре, программируемом при помоши пифровг.ж клавиш для предварпте:и пс1го программирования. В результате набора некоторой комбинации чисел приводы могут начат выполнение требуемого смешения независимо или в зависимости друг от дру га. Если днигатели работан1Т пезавис1: МО друг от друга, ьрашательное и осевое перемещения могут осупмествляться попеременно пиклами требуемой длительности. Таким образом, можно резать круглые или многоугольные трубы перпендикулярно, ступенчато или под требуемым углом. Например, резак 11 для кислородной резки может быть использован для получения отверстия произвольной формы в цилиндрической поверхности. Единственным ограниче- нием в отношении формы заготовок и контура резания являются программирование и характеристики микропроцессора, входящего в систему 27 цифрового управления, с современной микропроцессорной техникой можно выполнить все практические требования по управлению.
Механизм работает следующим обра30ti.
При выполнении резки плоских поверхностей устанавливают привод 12
15283
10
25
30
35
40
45
50
35
в определепном положентп ., затем вклн - чают привод колес 3, Псшеречное перемещение па паправляющих 1 можно выполнять произвольно в зависимости от управления приводом осевого перемещения. Таким образом, можно полу1Г)1ТЬ произвольные коптуры резания на плоских листах. необходимо оСрл- ботать вертикальную плоскун (товерх- ность, например вертикальную сторону квадратной трубы, то приводят во вр лпеипе привод 12 враьчения для поворота в горизонтальное положение резака 1 1 . механизм перемешаю на паправлян1ип1х 1 в положение, когда резак 1 1 11ЛХОДИТСЯ на соответствуш- пем рабочем расстоянии от поверхности заготовки, и используют регу- ппроночнме винты 5 с приводом 6 для смещения резака 11 в вертикальном ьгаправлспип. Можгг быть приведен iu) Bpaiiiefnie привод 22 осевого перемещения для об1)едипения горизонтального перемещения с вертикальным перемещением для наклонного резания нл leiJTHKajiiiHofi поверхности. Можно ис- liCJfibTOBaTi, я попеременный привод для получения ступенчатого контурл ре- занпя.
Ф о ) м у л а изобретения
конце от резака, и зубчатой рейкой, установленной на направляющем кронштейне с возможностью взанмодейст- вия с шестерней привода осевого пе- ремешення, при этом на поверхности направляющего кронштейна выполнена продольная канавка, в которой расположена шпонка ведомой шестерни.
тановлена с возможностью врар;.ения относительно основания.
