фиг Л
Изобретение относится к посадочным устройствам вертолетов, которые обеспечивают посадку вертолета на неровной или сильно наклоненной поверхности.
Цель изобретения - расширение эксплуатационной возможностей посадочных устройств и вертолета в целом путем обеспечения безопасной и гарантированной посадки машины на неровной или на наклоненной поверхности, что особенно требуется для спасательных вертолетов и вертолетов, использующихся в горной местности.
Цель достигается тем, что посадочное устройство содержит выдвижные стойки с опорными элементами, размещенные подвижно на кронштейнах, гиростабилизатор и выдвижные штоки, каждый из которых размещен на кронштейне, а также лебедку с гибкими связями, приводом и отводными блоками, причем отводные блоки размещены на концах выдвижных стоек и на кронштейнах, гибкие связи одним концом закреплены на кронштейнах, а другим - на барабане лебедки и выполнены взаимодействующими с отводными блоками, при этом маховик гиростабилизатора установлен в горизонтальной плоскости, барабан лебедки кинематически соединен с маховиком гиростабилизатора, а кронштейны снабжены подпружиненными фиксаторами и их приводом, взаимодействующими со стойками.
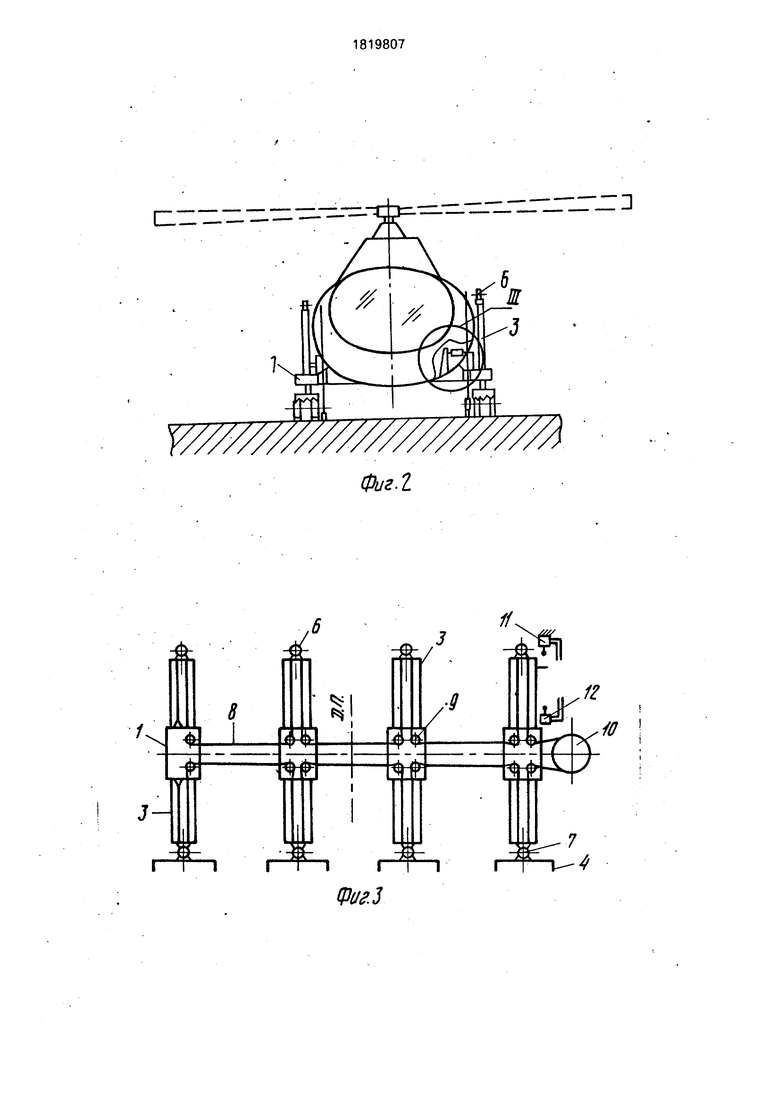
На фиг. 1 изображен вертолет с устройством посадки, вид сбоку; на фиг. 2 - то же, вид спереди; на фиг. 3 - один из возможных вариантов развернутой схемы тросовой оснастки системы подъема-опускания стоек; на фиг. 4 - храповой механизм стопора для стоек; на фиг, 5 - выдвижной шток с датчиками его положения; на фиг. 6 - принципи- альная схема соединения маховика гиростабилизатора с барабаном лебедки; на фиг. 7 - инерционная масса с датчиком, регулирующим нагрузки на стойки.
На вертолете установлены опорные кронштейны 1, на которых поворотно смонтированы колесные шасси 2.
На кронштейнах 1 установлены направляющие для выдвижных стоек 3, содержащих шарнирно закрепленные Урунтозахваты 4, а в других направляющих кронштейнов 1 (или вблизи кронштейнов 1) также с возможностью выдвижения закреплены штоки 5, содержащие ролики на их нижних концах. На концах стоек 3 закреплены блоки 6 и 7, через которые перекинуты гибкие связи 8. концы которых закреплены на кронштейне 1.
На кронштейнах 1 закреплены также блоки 9, через которые гибкие связи 8 перекинуты так же, как и через барабан лебедки 10, на котором закреплены другие концы гибких связей 8.
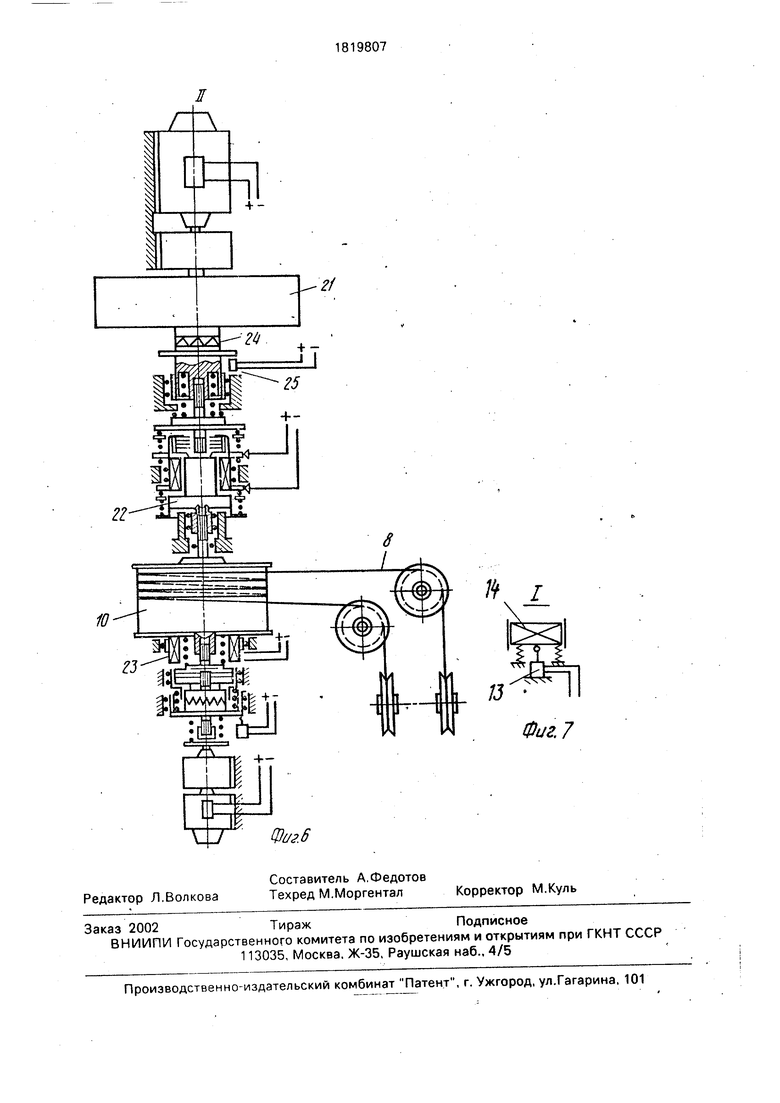
Конечные положения стоек 3 фиксированы датчиками 11 и 12, а вертолет также содержит датчик 13 предельной нагрузки на стойки 3. Датчик 13 контактирует с подпружиненной инерционной массой 14, а стойки 3 могут фиксироваться храповиками 15, задействованными через гидроцилиндры 16, которые содержат поршни со штоками 17 и пружины 18.
Штоки 5 в крайних положениях фиксируются датчиками 19 и 20, а вертолет снабжен гиростабилизатором21, который может быть размещен в фюзеляже машины или снаружи его и должен содержать горизонтально установленный маховик и привод ма- ховика. Маховик гиростабилизатора
кинематически может быть сочленен с барабаном лебедки 10 через фрикционную муфту 22 с электромагнитным управлением ею, а привод лебедки 10 может быть подключен к барабану лебедки или отключен отбарабана с помощью другой фракционной муфты 23 также с электромагнитным управлением ею (эта муфта может быть не установлена). Соединение маховик-барабан содержит также зубчатую подпружиненную муфту 24
с датчиком 25.
Описываемое устройство работает следующим образом.
При посадке машины на горизонтальную поверхность стойки 3 подняты в исходное положение до срабатывания датчиков 11. Привод лебедки 10 выключен, барабан лебедки застопорен с помощью электромагнитного колодочного или ленточного тормоза (не показан, а в случае использования
самотормозящегося червячного редуктора в приводе лебедки тормоз можно не ставить).
Штоки 5 опущены, датчики 13, 19, 20 обесточены, Гиростабилизатор не работает.
Машина обычным путем опускается на колеса 2, штоки 5 поднимаются за счет упора в посадочную поверхность (если они не имеют отдельного привода подъема-опускания штоков).
0 При посадке на наклонную или на неровную поверхность происходит следующее,
Датчики 13, 19, 20 подключают к системе сигнализации посадки. Включают в рабо5 чий режим гиростабилизатор, в котором маховик раскручивают до расчетной величины. Вертолет приближают к посадочной поверхности до контакта штоков 5 с , посадочной поверхностью и срабатывания датчиков 20.
Срабатывание датчиков 19 запрещает дальнейшее опускание вертолета. В случае, если включаются датчики 19, но. ка одном из штоков 5 не включается датчик 20, то автоматически должен быть подан сигнал отме- ны посадки в данной точке. После срабатывания датчиков 20 на всех штоках снижение вертолета можно прекратить, необходимо включить привод лебедки 10 на перемотку тросов 8 и опускание стоек 3.
После того, как одна из стоек коснется посадочной поверхности, она автоматически прекращает свое движение вниз и начи- нают опускаться другие стойки 3. Гиростабилизатор удерживает машину от крена.
После того, как все стойки 3 упрутся в грунт, может быть произведена проверка несущей способности грунта на возможность посадки машины ь данной точке. Проверка грунта производится автоматически путем быстрого опускания сразу всех точек 3 и сообщением нагрузки Р от вертолета грунту. Усилие Р равно или более веса вертолета, Быстрое движение стоек вниз обеспечивается отключением барабана лебедки 10 от его привода через включение электромагнитной муфты 23 и отключение связанной с ней фрикционной муфты от редуктора привода лебедки 10 (см. фиг, 7) и одновременным сочленением барабана лебедки 10 с вращающимся маховиком гиростабилиза- тора 21. Сочленение барабана лебедки с маховиком производится включением электромагнитной муфты 22 и связанной с ней фрикционной муфты в работу (см. фиг. 7).
Регулировка необходимого усилия Р производится при монтаже устройства путем регулировки величины поджатия пружины под массой 14 (см. фиг. 8), связанной с датчиком 13, или регулировкой величины иоджатия пружины кулачковой муфты и связанного с ней датчика 25 (см. фиг. 7).
. Срабатывание датчика 25 осуществляется за счет передачи крутящего момента расчетной величины кулачковой муфте 24, а срабатывание датчика 13 производится за счет ускорения вертолета, передаваемого, последнему от стоек 3. При необходимости проверку несущей способности грунта или снега в точке посадки можно повторить.
После срабатывания датчиков 13 или 25 включаются в работу золотники системы управления гидросистемы на выпуск масла из рабочих полостей гидроцилиндров 16. Пру- жинами 18 поршни 17 гидроцилиндров 16 смещаются и храповики 15 фиксируют стойки в их опущенном рабочем положении.
Несущий и рулевой винты машины могут быть отключены от их привода. Гиростабилиэатор также отключается от его привода маховик останавливается, посадка машины закончена.
При взлете машины включают в работу несушки и рулевой винты, поднимают вертолет, дают масло в гидроцилиндры 16, освобождают стойки 3 и, включив в работу привод барабана лебедки 10, поднимают стойки 3 в их исходное положение до срабатывания датчиков 11.
Устройство отличается простотой выполнения, небольшим весом и позволяет производить посадку машины в особо сложных условиях ее эксплуатации, чем достигается расширение эксплуатационных
возможностей вертолета,
Формула изобретен и я 1. Посадочное устройство вертолета, содержащее выдвижные стойки с опорными элементами, размещенные подвижно на
кронштейнах, отличающееся тем, что, с целью повышения эксплуатационных возможностей, оно снабжено гиростабилизато- ром, выдвижными штоками, каждый из которых размещен на кронштейне, выдвижной стойки и лебедкой с гибкими связями, приводом и отводными блоками, причем отводные блоки размещены на концах выдвижных стоек и на кронштейнах, гибкие связи одним концом закреплены на кронштеинах, а другим - на барабане лебедки и выполнены взаимодействующими с отводными блоками, при этом маховик гиростаби- лизатора установлен в горизонтальной плоскости.
2. Устройство по п. 1,отличающее- с я тем, что барабан лебедки кинематически соединен с маховиком гиростабилизатора. 3. Устройство поп. 1,отличающее- с я тем. что оно снабжено подпружиненными фиксаторами, размещенными на кронштейнах и взаимодействующими со стойками, и приводом фиксаторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕРТОЛЕТ | 1990 |
|
RU2030328C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ВЫДВИЖНОЙ СЕКЦИИ АНГАРА | 2018 |
|
RU2676995C1 |
| УСТАНОВКА ДЛЯ ПОГРУЖЕНИЯ И ИЗВЛЕЧЕНИЯ СВАЙ | 2001 |
|
RU2208090C1 |
| ГУСЕНИЧНЫЙ ТРАНСПОРТЕР И СПОСОБ ПОГРУЗКИ НА НЕГО ПАРОМА | 2006 |
|
RU2332322C1 |
| ВЗЛЕТНО-ПОСАДОЧНЫЙ КОМПЛЕКС С УНИВЕРСАЛЬНЫМ СИЛОВЫМ УСТРОЙСТВОМ | 2012 |
|
RU2497714C2 |
| СКЛАДНОЙ БЛОК РАЗБОРНОГО МОСТА | 2020 |
|
RU2758315C1 |
| Устройство для динамического уплотнения грунтов | 1986 |
|
SU1469019A1 |
| Способ посадки вертолета и система для его осуществления | 1991 |
|
SU1819822A1 |
| КАНТОВАТЕЛЬ ДЛЯ СБОРКИ И СВАРКИ ИЗДЕЛИЙ | 2004 |
|
RU2281844C2 |
| РАСПАШНОЙ БОРТ СПЕЦИАЛЬНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2399537C1 |

Изобретение относится к авиационной технике, а именно к взлетно-посадочным устройствам летательных аппаратов. Целью изобретения является повышение эксплуатационных возможностей. При посадке на неровную и наклонную поверхность включают гиростабилизатор 21 и вертолет снижается до контактов с посадочной поверхностью всех штоков 5. Включается привод лебедки, который перематывает трос, закрепленный за стойки 3. Каждая стойка 3 опускается на необходимую длину. Проверка плотности грунта производится путем сочленения. 2 з,п. ф-лы, 7 ил,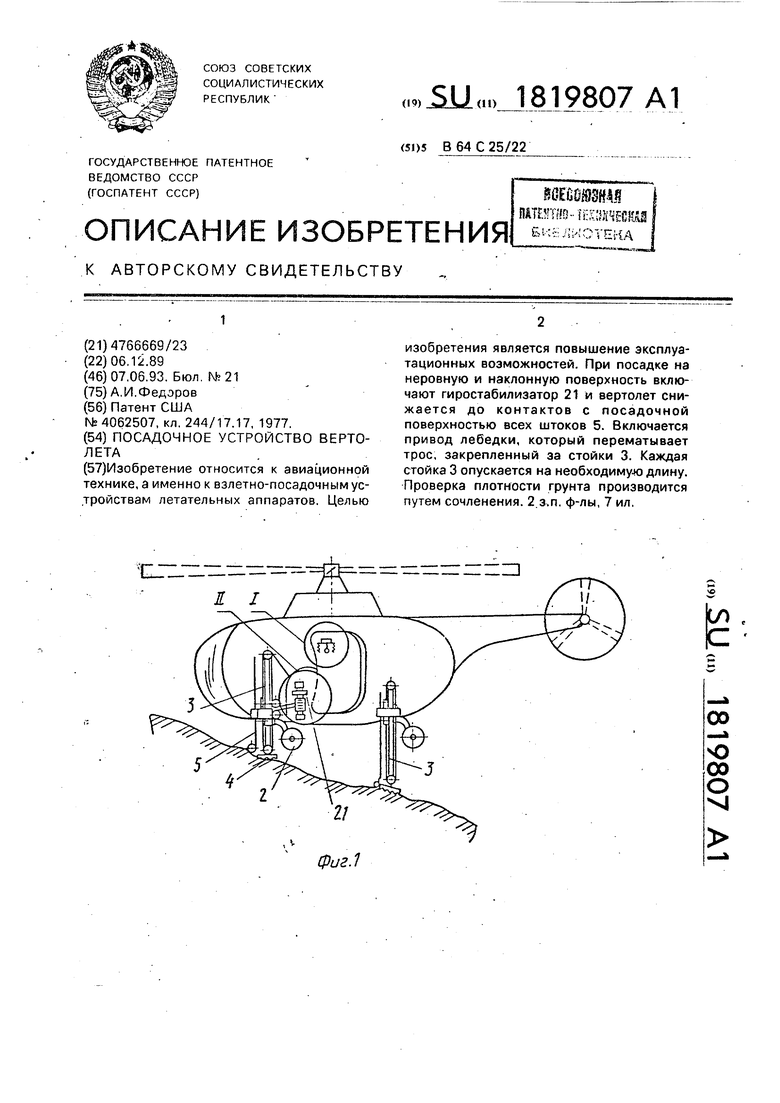
Фиг.1
18 /7 Я
Фиг4
7
у / /
/ у / / / / / / / / / / / / /
хUe.
2f
-J
Фиг.6
0 I
Фи г. 7
| Патент США №4062507, кл | |||
| Нагревательный прибор для центрального отопления | 1920 |
|
SU244A1 |
