1
(21)4296009/24-24
(22)13.03.37
(46) 15.12.39. Бюл. № 46
(71)Институт проблем управления, Московский завод точных измерительных приборов и Государственный научно-исследовательский институт по промышленной и санитарной очистке газов (SU) и Лутомаатиотоймисто А.Хакала KU (FI)
(72)А.П.Шубин, Т.К.Ефремова,
А.А.Тагаевская, З.И.Белов, Е.О.Барский, В. Э. Эрдман , П.И.Дудкин (SU) и Антти Хакала (FI) (53) 621.525(083.3) (56) Ав.торское свидетельство СССР № 1043589, Ю1. G 05 3 11/60, 1933.
Авторское свидетельство СССР № 1363135, кл. G 05 В 15/00, кл. G 05 В 11/53, 01.07.86.
Е| ремова Т.К., Тагаевская А.А., Шубин А.Н. Пневматические комплексы технических средств автоматизации.- М.: Машиностроение, 1937, с. 280, с. 18.
(54) ППЕВМОЭЛЕЮТОППАЯ СИСТЕМА ЦЕНТ- РАЛИЗОВАПНОГО КОПТРОЛЯ И УПРАВЛЕП1Ш (57) Изобретение касается пневмоэлек- тронных систем централизованного контроля и управления. Целью изобретения является повышение точности системы при регулировании соотношений расхода. Отличие системы от прототипа, обеспечивающее достижение поставленной цели, состоит в том, что на каждый агрегат 1 технологического процесса добавляется блок 7 переменных коэ11х)иииентов соотношения, позволяющий корректировать коэффициент соотношения у регуляторов расхода. 2 ил.
С
S
00
СП
ю
5г№гЛ
fflra -
г}
OLIL
т
4-п L5Jn )
TtA
rs
00
со
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная система управления производственными процессами | 1973 |
|
SU492852A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1980 |
|
SU935876A1 |
| Пневмоэлектронная система централизованного контроля и управления | 1986 |
|
SU1363135A1 |
| Устройство для связи управляющего вычислительного комплекса с пневматическими регуляторами | 1983 |
|
SU1163330A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1980 |
|
SU953625A1 |
| Пневматическая система централизованного контроля и управления | 1980 |
|
SU962848A1 |
| Пневматическая система централизованного контроля и управления | 1980 |
|
SU1001006A1 |
| Пневматическая система централизованного контроля и управления агрегатами с непрерывными технологическими процессами | 1981 |
|
SU1043589A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1985 |
|
SU1341617A1 |
| Пневматическое устройство управления | 1980 |
|
SU881665A1 |
Изобретение касается пневмоэлектронных систем централизованного контроля и управления. Целью изобретения является повышение точности системы при регулировании соотношений расхода. Отличие системы от прототипа, обеспечивающее достижение поставленной цели, состоит в том, что на каждый агрегат 1 технологического процесса добавляется блок 7 переменных коэффициентов соотношения, позволяющий корректировать коэффициент соотношения у регуляторов расхода. 2 ил.
ai
IT
.-IMft f
(fuel
Изобретение относится к пневмо- электронным системам централизован - него контроля и управления для автоматизации непрерывных технологических процессов, включающих процессы термического сжигания химических реагентов и газовых топлив в химии, нефтехимии, нефтепереработке и других отраслях промышлеиности,
Целью изобретения является повышение точности системы.
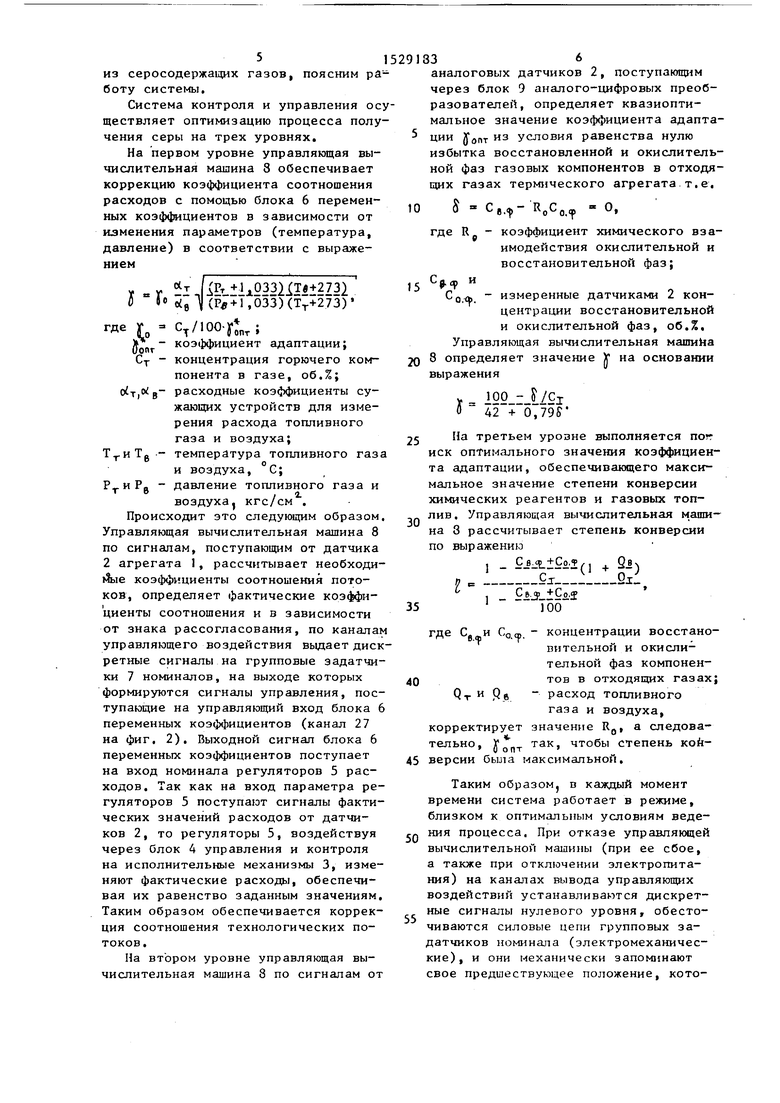
На фиг. 1 представлена блок-схема пневмоэлектронной системы централизованного контроля и управления; на фиг, 2 - структурная схема пневматического блока переменных коэффициентов соотношения расходов,
Пневмоэлектроннаясистема, централизованного контроля и управления (фиг, 1) содержит п однотипных технологических агрегатов 1, аналоговые датчики 2,,,,.,2, исполнительные механизмы 3,,,,,,3, блок 4 управления и индикации, регуляторы 5, ,,,,5 расходов, блоки 6;,,,,,6 переменных коэффициентов соотношения расходов, блоки 7 4,,,,,7 групповых задатчиков номиналов, управляющую вычислительную машину 3,,два блока 9 и 10 аналого- цифровых преобразователей и задатчик 11 дистанционного управления.
Выходы датчиков 2,,,,,2 подсоединены к первой группе 12. информационных входов блока 4 управления и индикации, через первый блок 9 аналого цифровых преобразователей - к первой 13,,,.,13р группе входных измерительных каналов управляющей вычислительной машины 8, к каналам 14,,,..,14„ переменной регуляторов 5,,,..,5 расхода и каналам 15;,,,,,15 блоков 6;,,,,,6 переменных коэффициентов соотношения расходов. Входы исполнительных механизмов 3 Зщсоеди-
иены с первой группой 16 выходных информационных каналов блока 4 управления и индикации, с вьгход 1ми 17,,,, 1 регуляторов 5, ,,,,, 15,„ расхода и через второй входной информационный канал 13 блока 4 управления и индикации с задатчиком 11 дистанционного управления. Вторая группа 19 выходных информационных каналов блока 4 управления и индикации соединена с отключающими входами регуляторов 5,5 расхода, Первые управляющие входы 20;, ,,., , блоков 7,,...7,у групповых задатчиков номиналов сое
л
п 5 Q
. .,
5
0
5
динены с третьей группой 21 информа- циониых выходов блока 4 управления и индикации, а вторые управляющие
входы 22122 - С каналами 23,,,,,
,, , ,23 вывода дискретной информации управляющей вычислительной машины 8, канал 24 лвода информации которой соединен с четвертым информационным выходом 25 блока 4 управления и индикации. Выходы 254 блока 7 групповых эадатчиков номиналов соединены с каналами 26 входов номинала регуляторов 54 расхода, с каналами 27,, ,,,27 входа номинала блоков 6; I , i6n, переменных коэффициентов соотношения расходов, с третьей группой 28 информационных входов блока 4 управления и индикации и через блок 10 аналого-цифровых преобразователей с второй группой 29 входных измерительных каналов управляющей вычислительной машины 8, Выходы 30,,,,,30 блоков 6 ;,,,,,6 переменных коэффициентов соотношения расходов соединены с входами 26;,,,,,26 номиналов соответствующих регуляторов 5-,,,, ,5
расходов,
I
Блок 6 переменных коэффициентов соотношения расходов (фиг, 2) предназначен для y шoжeния параметра, поступающего на его вход Pg (канал 15) от датчика 2j, на корректирующий коэффициент К, однозначно определяемый уровнем сигнала на его управляющем входе Pupp (канал 27), поступающего с выхода блока 7 групповых задатчиков номинала. Сигнал с выхода блока РВЫХ (канал 30) поступает на вход но№1нала регулятора 5 расхода. Блок 6 содержит дроссельный сумматор 31, элемент 32 сравнения, усилитель 33 мощности выходного сигнала, дроссельный сумматор 34,, одномембранный элемент 35, постоянный дроссель 36 и задатчик 37 опорного давления. В соответствии со структурной схемой блок 6 переменных коэффициентов реализует операц№о Р,,, K(Pg, - Р) + РОП оп опорное давление, равное 0,2 кгс/см, нижний уровень входных и выходных пневматических сигналов (формируется задатчиком 37). К - переменный коэффициент, однозначно зависящий от уровня управлякяцего сигнала :К (Р,рр),
На примере реализации способа управления процессом получения серы
5
из серосодержащих газов, поясним работу системы.
Система контроля и управления осуществляет оптимизацию процесса получения серы на трех уровнях.
На первом уровне управляющая вычислительная машина 8 обеспечивает коррекцию коэффициента соотношения расходов с помощью блока 6 переменных коэффициентов в зависимости от изменения параметров (температура, давление) в соответствии с выражением
. у .11АОЗЗШ«12731 о oiell (Р +1,033) ()
де Г с /юо-у:,;
W - 1Г о о IWK-L t Т и О IJ Т
I
опт
коэффициент адаптации;
Происходит это следующим образом.
15
С-г - концентрация горючего ком- рО
понента в газе, об.%; расходные коэффициенты сужающих устройств для рения расхода топливного газа и воздуха;25
иТр - температура топливного газа и воздуха, °G;
иР.. - давление топливного газа и
1 воздуха, кгс/см .
30
Управляющая вычислительная машина 8 по сигналам, поступающим от датчика 2 агрегата 1, рассчитывает необходи- A)ie коэффициенты соотношения потоков, определяет фактические коэффициенты соотношения и в зависимости от знака рассогласования, по каналам управляющего воздействия выдает дискретные сигналы на групповые задатчи- ки 7 номиналов, на выходе которых формируются сигналы управления, поступающие на управляющий вход блока 6 переменных коэффициентов (канал 27 на фиг, 2), Выходной сигнал блока 6 переменных коэффициентов поступает на вход номинала регуляторов 5 расходов. Так как на вход параметра регуляторов 5 поступают сигналы фактических значений расходов от датчиков 2, то регуляторы 5, воздействуя через блок 4 управления и контроля на исполнительные механизмы 3, изменяют фактические расходы, обеспечивая их равенство заданным значениям. Таким образом обеспечивается коррекция соотношения технологических потоков.
На втором уровне управляющая вычислительная машина 8 по сигналам от
0
336
аналоговых датчиков 2, поступающим через блок 9 аналого-цифровых преобразователей, определяет квазиоптимальное значение коэффициента адаптации УОПТ условия равенства нулю избытка восстановленной и окислительной фаз газовых компонентов в отходящих газах термического агрегата.т.е.
S
Ce.f .чр
О,
где R коэффициент химического взаимодействия окислительной и восстановительной фаз;
Ср.. и
CQ.Q, - измеренные датчиками 2 концентрации восстановительной и окислительной фаз, об.%. Управляющая вычислительная машиНа 8 определяет значение jf на основании выражения
у 100 ll/Ci О 42 + 0,795
На третьем уровне выполняется nor иск оптимального значения коэффициента адаптации, обеспечивающего максимальное значение степени конверсии химических реагентов и газовьпс топ- лив. Управляющая вычислительная маши- на 8 рассчитывает степень конверсии по выражению
J C e cL±Co,T, QB.
(
П
, Ci.j.±Co,f 100
О
и
л с Q
5
где Cg и Со.(р, - концеитрации восстановительной и окислительной фаз компонентов в отходящих газах; QT и Ре - расход топливного
газа и воздуха,
корректирует значение Rg, а следовательно, так, чтобы степень кой- версии была максимальной,
Таким o6pa3OMj о каждый момент времени система работает в режиме, близком к оптимальным условиям ведения процесса. При отказе управляющей вычислительной машины (при ее сбое, а также при отключении электропитания) на каналах вывода управляющих воздействий устанавливаются дискретные сигналы нулевого уровня, обесточиваются силовые цепи групповых за- датчиков номинала (электромеханические), и они механически запоминают свое предшествующее положение, которое однозначно определяет выходной пневматический сигнал на их выходах, Так как этот сигнал ранее соответствовал значению ведения процесса в оптимальных условиях, то при отказах, сбоях и отклонениях электропитания управляющей вычислительной машиньт система обеспечивает работу агрегатов в режимах, близких к оптимальным до момента устранения аварийных ситуаций управляющей вычислительной машины.
Формула изобретения
Пневмоэлектронная система централизованного контроля и управления, содержащая датчики, подключенные к первой группе информационных входов блока управления и индикации и через первый блок аналого-цифровых преобразователей к первой группе входных измерительных каналов управляющей вычислительной машины и каналам переменной регуляторов расхода по числу датчиков, исполнительные механизмы, связанные первой группой информационных выходов блока управления и индикации с выходами регуляторов расхода и второй группой инфорг ационных входов блока управления и индикации.с выхода1 и задатчиков дистанционного управления, причем вторая группа информационных выходов блока управления соединена с отключающими входами
Редактор А.Лежнина
Фие
Составитель О.Гудкова Техред Л. Сердюкова
Заказ 7640/42
Тираж 788
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. А/5
регуляторов расхода, блок групповых задатчиков номиналов, выходы которых соединены через второй блок аналого- цифровых преобразователей с второй группой входных измерительных каналов управляющей вычислительной машины, с каналами номиналов соответствующих регуляторов расхода и третьей группой информационных входов блока управления и индикации, первая группа управляющих входов каждого блока групповых задатчиков номиналов соединена с третьей группой информацио 1ных вы- г ходов блока управления и индикации, а вторая группа управляющих входов каждого блока групповых задатчиков но1 1иналов соединена с каналами вывода дискретной информации управляющей вычислительной машины, канал ввода дискретной информации ко горой соединен с четвертым информационным выходом блока управления и индикации, отличающаяся тем, что, с целью повышения точности системы при регулировании соотношения расходов, в нее в каждый контур регулирования соотношения расходов введен блок переменных коэффициентов соотнощения, выходаьо подключенный к каналам зада- }Ш11 соответствующих регуляторов рас- У:ОДОВ, управляющими входами - к выходам соответствующих блоков групповых задатчиков номиналов, а информационными входами - к выходам соответст0
5
0
5
вуютдах датчиков.
Корректор Л.Бескид
Подписное
