Изобретение относится к электротехчастности к устройствам для шравлення и регулирования электро- здриводов, li может быть использовано рКля последовательного управлепия электроприводами подъемно-транспортных jKaiunii.
, Цель изобретения - уменьшение га- ()аритов и расширение функциональных ip о 3 м ожн остей.
На фиг. 1 изображеп командоаппарат (рез крьппи, обций вид; на фиг. 2 - разез Л-Л на фп.г. 1; па фиг. 3 - коман оаппарат, вид сверху; на фиг. 4 - азрез Б-Б на фиг. 1.
Командоаппарат содержит корпус 1 упором 2 для ограничения углового юворота, ось 3, снабженную повод- ;ом 4 с закрепленными на нем штифтом и пружинами 6, зубчатые секторы 7 .8, зубчатые колеса 9 и 10, соеди- епные с коммутационных уст- ойств - задатчиками скорости 11 и
2, микровыключатели 13, 14, рукоят- jfy 15 управления с КРЕОЛКОЙ 16 заня- ости рук оператора и двуплечим ры- агом 17, шарнирно связанньм с осьюЗ
корпусе 1 выполнен Z - .образный г|аз 18 под рукоятку 15 управления,
граничиваю1ций перемещение двуплечего рычага. 17, для предотвращения слу- айного включения обратного ход.а, икровыключатели 19 и 20, закреплен- ые па корпусе 1 и установленные с гозможност.ью взаимодействия с двуплет им рьиагом 17 для управления другим рабочим органом (например, грузозах- ватом), .пружина 21 для возврата зуб- ч|атых секторов 7 и 8 в исхо.дноё поло- ярение, а пружины б служат для возвра- ifa двуплечего рычага 17 в исходное г(ол.ожение„ Зубчатые секторы 7 и 8, . рукоятка 15 управления с поводком 4 и двуплечим рычагом 17 расположены lia оси 3 „
Командоаппарат работает следуюя(им с бразом„
В исходном положении командоаппа- рата рукоятка 15 управления находится в средней части Z-образного па- .за 18. Кнопка занятости рук оператора не зажата. Зубчатые секторы 7 и 8 11за1Модействуют с упором 2 при по- ь(ощи пружины 21 и поводка 4 через н|тифт 5. Не взаимодействуют пружины 6 и микровыключатели 19 и 20 с дву- Плечим рычагом 17 и поводок 4 с мик- ровыключателямл 13 и 14. Задатчики 11
гQ
5
0
5
0
5
0
5
0
5
и 12 скорости находятся в исходном положении, осуществляя управление исполнитель)ым механизмом (не показан), и через зубчать е колеса 9 и 10 связаны с зубчатыми секторами 7 и 8. Нажатием кнопки 16 занятости рук командоаппарат включается в работу. Под действием плавного перемещения рукоятки 15 управления по Z-образному пазу 18 начинает вращаться ось 3 и поводок 4. и1тифт 5, взаимодействуя с одним из зубчатых секторов 7 или 8, вращает его, растягивая пружину 21. Зубчатый сектор 7 или 8, взаимодействуя с задатчиками 11 или 12 скороС ти, вращает его, плавно увеличивая скорость вращения исполнительного механизма. Поводок 3 своими боковыми сторонами начинает взаимодействовать с микровыключателями 13 или 14. Нри плавном возвращении рукоятки 15 управления в исходное положение штифт 5 освобождает зубчатьй сектор, например 7 или 8, и пружина 21, сжимаясь, возвращает зубчатый сектор 7 или 8 в исходное положение, и, взаимодействуя с задатчиками 11 или 12 скорости, плавно уменьшает скорость вращения исполнительного механизма. При перемещении рукоятки 15 управления в противоположную сторону цикл повторяется с изменением направления вращения исполнительного механизма. Перемещая рукоятку управления 15 по Z-образному пазу 18, двуплечий рычаг 17 вступает во взаимодействие с одной из пружин 6 и микровыключателем 19 или 20 для управления другим рабочим органом (например,грузо- захвата в толчковом peжIiмe) . При перемещении в противоположную сторону двуплечий рычаг 17 возвра111,ается в ис- ходное положение, а затем входит во взаимодействие с другой пружиной 6 и микровыключателем 19 или 20, меняя направление перемещения рабочего органа. При освобождении рукоятки 15 управления кнопка 16 занятости рук размыкает цепь управления исполнительным механизмом, а пружина 21 сжимается и возврагцает в исходное положение сектор 7 .или 8 и под действием штифта 5 возвращает рукоятку 15 управления в среднюю часть Z-образного паза 18, а пружины 6 - в исходное положение.
Размещение зубчатых секторов и ру- КОЯТК.И управления с проводником на
П
JF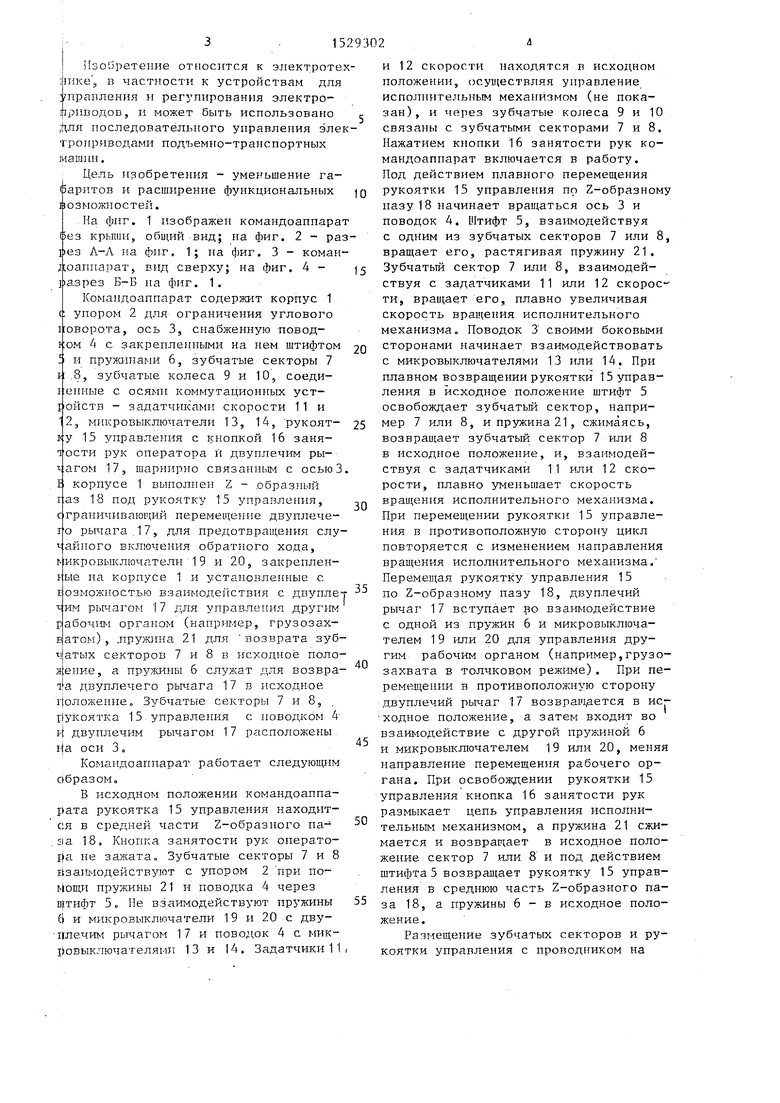
| название | год | авторы | номер документа |
|---|---|---|---|
| Командоаппарат | 1984 |
|
SU1188798A1 |
| Замок | 1986 |
|
SU1395796A1 |
| Замок | 1984 |
|
SU1285136A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ НАВОДКОЙ | 1997 |
|
RU2117900C1 |
| РУЧКА УПРАВЛЕНИЯ | 1995 |
|
RU2085993C1 |
| Устройство для измерения силы и выносливости мышц | 1986 |
|
SU1426540A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ НАВОДКОЙ | 1999 |
|
RU2165581C2 |
| Устройство управления | 1985 |
|
SU1312553A1 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ | 1971 |
|
SU319976A1 |
| ПРИСПОСОБЛЕНИЕ К АВТОМАТИЧЕСКИМ ТОКАРНЫМ СТАНКАМ ДЛЯ ПОДАЧИ МАТЕРИАЛА | 1931 |
|
SU38565A1 |
Изобретение относится к электротехнике, в частности к устройствам для управления и регулирования электропроводов. Цель изобретения - уменьшение габаритов и расширение функциональных возможностей. Командоаппарат содержит корпус 1 с упором 2, ось 3, снабженную поводком, который взаимодействует своим штифтом 5 с зубчатыми секторами 7 и 8, а боковыми сторонами - с микровыключателями при перемещении рукоятки управления. При этом зубчатые секторы 7 и 8, связанные с зубчатыми колесами 9 и 10, воздействуют на задатчики скорости, на осях которых установлены зубчатые колеса 9 и 10. 2 з.п.ф-лы, 4 ил.
Составитель Л.Новикова Редактор Т.Лазаренко Техред Л.Олийнык Корректор М.Васильева
Заказ 7749/48
Тираж 696
ВШйШИ Государственного комитета по изобретениям и открытиям при 1ЖНТ СССР 113035, Москва, Ж-35, Раушская наб., д. А/5
VJU2.5
Подписное
| Командоаппарат | 1984 |
|
SU1188798A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для переключения переключателей | 1987 |
|
SU1457009A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
