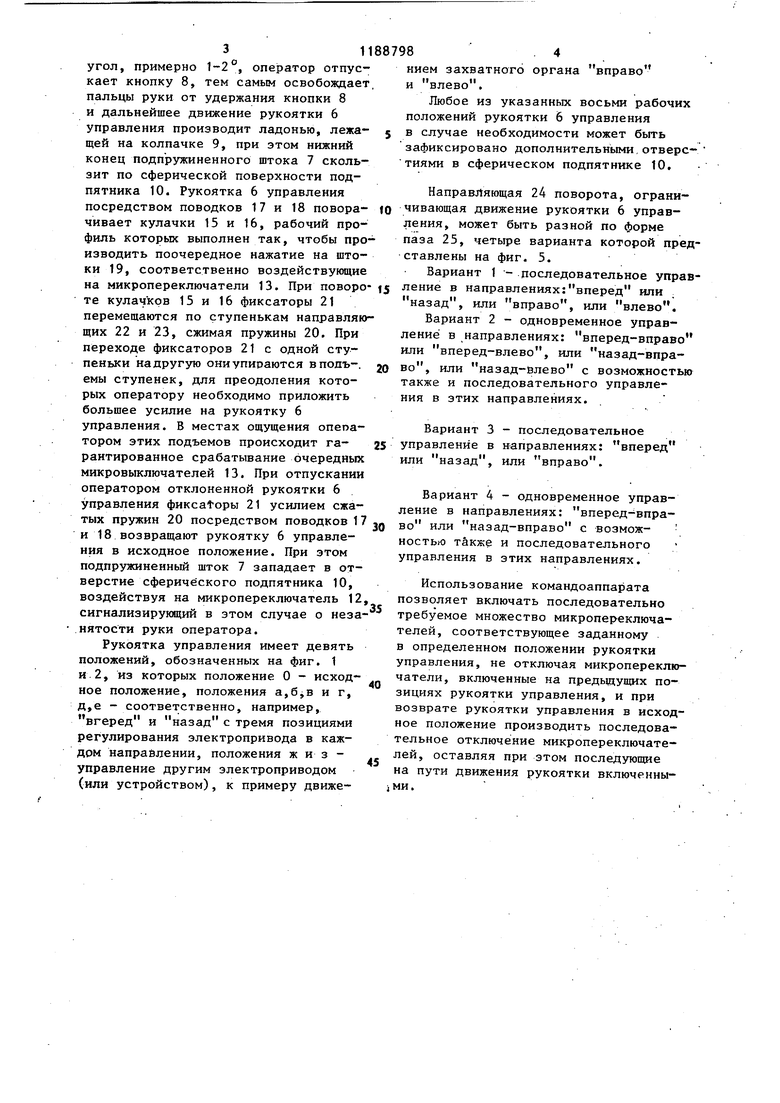
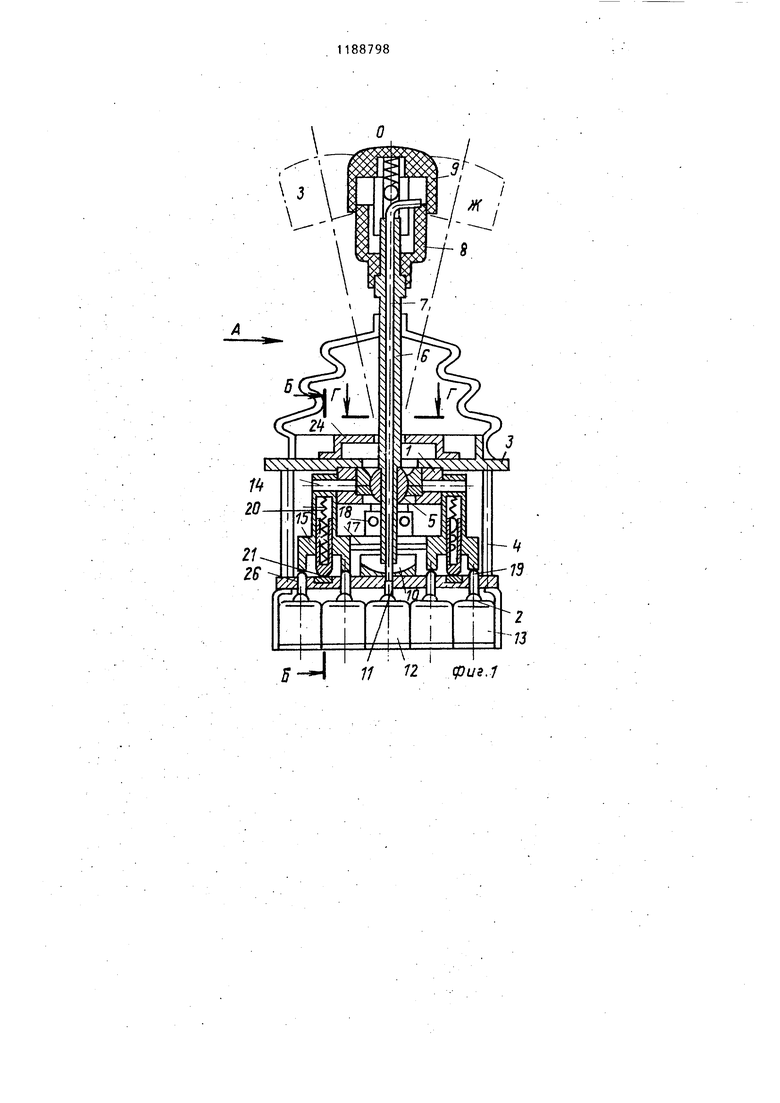
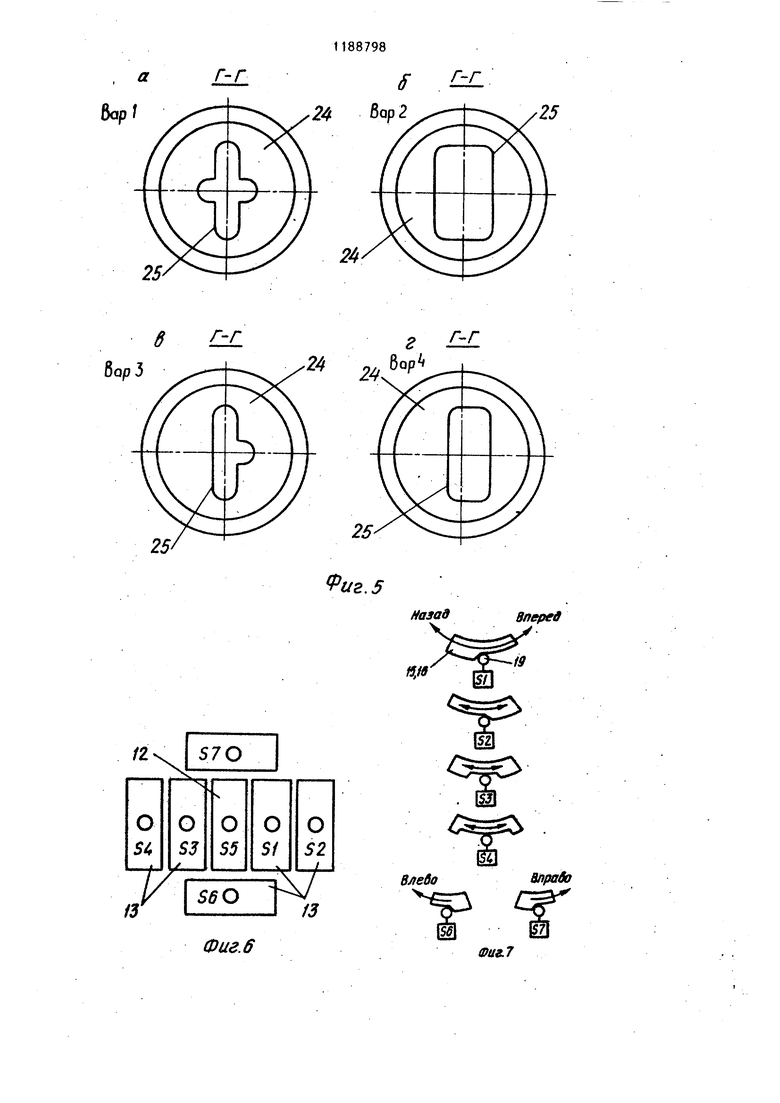
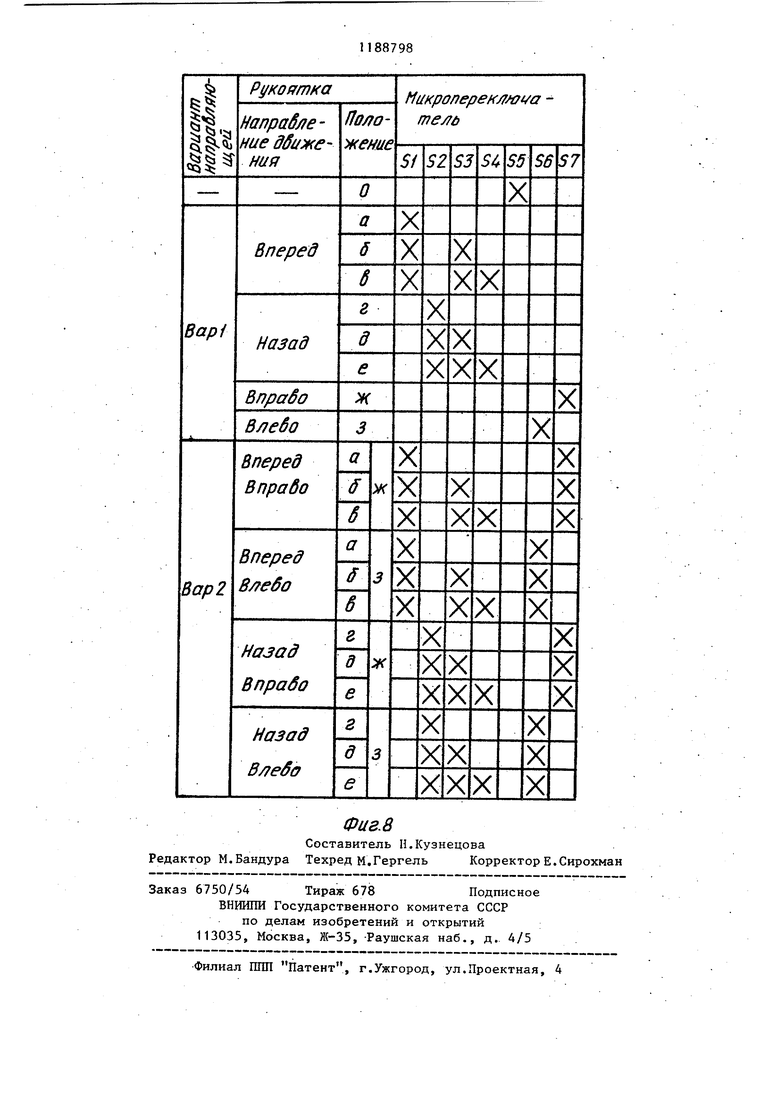
Изобретение относится к устройст вам для управления и регулирования электроприводов и может быть исполь зовано для последовательного или од новременного управления электроприводами подъемно-транспортных машин, например кранов-щтабелеров, перегру дателей, манипуляторов и т.п. Цель изобретения - расширение эксплуатационных возможностей, области применения командоаппарата, повышение надежности,, . На фиг. 1 изображен командоаппарат в разрезе; на фиг, 2 - вид А на фиг. 1; на фиг. 3 - разрез В-Б на фиг. 1; на фиг. 4 - разрез В-В н фиг. 2; на фиг. 5-а,б,в,г - сечение Г-Г на фиг. 1 (варианты конфигу рации пазов в направляющей поворота рукоятки управления; на фиг. 6 - ра положение микропереключателей, вид сверху; на фиг. 7 - кулачки во взаимодействии с микропереключателя ми; на фи1. 8 - таблица срабатывани микропереключателей в зависимости от направления движения рукоятки управления и варианта исполнения направляющей. Предлагаемый командоаппарат содержит корпус 1 с основанием 2 и крышкой 3, последние соединены межд собой стойками 4. В корпус 1 встрое на шаровая опора 5, в которой закреплена полая поворотная рукоятка 6 управления, выполненная разборной и имеющая подпружиненньш шток 7 и телескопически установленные подпружиненную кнопку 8 и колпачок 9, причем кнопка 8 и колпачок 9 имеют возможность свободного вращения вокруг оси рукоятки 6 управления. Подпружиненный шток 7 в исходном положении пропущен через отверстие, выполненное в установленном на основании 2 сферическом подпятнике 10, и опирается на шток 11, воздействующий на микропереключатель 12. Сферический подпятник 10 предназначен для дополнительного возврата в исход ное положение отклоненной на определенный угол рукоятки 6 управления и при необходимости для фиксации ее в рабочих положениях посредством выполнения дополнительных отверстий в сферическом подпятнике 10. К нижней части основания 2 прикреплено коммутирующее устройство, вьтолненное в виде блока микропереключателей 13. .Соосно шаровой опоре 5 на корпус ,1 с помощью осей 14 навешены кулачки 15 и 16 в двух вза:имнов перпендикулярных плоскостях, взаимодействующие с рукояткой 6 управления посредством поводкрв 17 и 18. Кулачки 15 и 16 имеют фигурные рабочие профили для взаимодействия со штоками 19 микропереключателей 13. В кулачки 15 и 16 встроены пружины 20 и фиксаторы 21, взаимодействующие с расходящимися от середины ступеньками направляющих 22 и 23 шагового механизма возврата. Ступеньки направляющих 22 и 23 имеют такие уклоны и высоты, чтобы обеспечить принудительное, возвращение рукоятки 6 управления в исходное положение. Шаг ступенек направляющих 22 и 23 соответствует поочередно нажатию кулачков 15 и 16 на штоки 19 микропереключателей 13. На крышке 3 установлена направляющая 24 поворота рукоятки 6 управления в виде пластины со сквозным фигурным пазом 25, конфигурация которого соответствует необходимым положениям рукоятки 6 управления. В основании 2 выполнены отверстия 26 для введения штоков микровыключателей . В исходном положении командоаппарата рукоятка 6 управления находится в вертикальном положении и зафиксирована в этом положении центральным отверстием в сферическом подпятнике 10. При этом кнопка 8 опущена, микропереключатель 12 нажат подпружиненным штоком 7, сигнализируя о незанятости руки оператора. Остальные микропереключатели 13 не нажаты. Оператор, поднимая пальцами кнопку 8, опираясь при этом ладонью на колпачок 9, выводит подпружиненный шток 7, выполненный изогнутым на одном конце и со сферой на другом конце, из центрального отверстия в сферическом подпятнике 10, тем са„ьп. выводя рукоятку 6 управления из зафиксированного исходного положения. Микровыключатель 12, на который уже не воздействует подпружиненный шток 7, сигнализирует о занятости руки оператора. Далее оператор наклоняет рукоятку 6 управления в нужном направлении вокруг шаровой опоры 5. После поворота на некоторый угол, примерно 1-2 , оператор отпус кает кнопку 8, тем самым освобождае пальцы руки от удержания кнопки 8 и дальнейшее движение рукоятки 6 управления производит ладонью, лежа щей на колпачке 9, при этом нижний конец подпружиненного штока 7 сколь зит по сферической поверхности подпятника 10. Рукоятка 6 управления посредством поводков 17 и 18 поворачивает кулачки 15 и 16, рабочий профиль которых выполнен так, чтобы про изводить поочередное нажатие на штоки 19, соответственно воздействующие на микропереключатели 13. При поворо те кулачков 15 и 16 фиксаторы 21 перемещаются по ступенькам направляю щих 22 и 23, сжимая пружины 20. При переходе фиксаторов 21 с одной ступеньки на другую ониупираются вподъ-. емы ступенек, для преодоления которых оператору необходимо приложить большее усилие на рукоятку 6 управления. В местах ощущения опеоатором этих подъемов происходит гарантированное срабатывание очередных микровыключателей 13. При отпускании оператором отклоненной рукоятки 6 управления фикcatopы 21 усилием сжатых пружин 20 посредством поводков 1 и 18 возвращают рукоятку 6 управления в исходное положение. При этом подпружиненный шток 7 западает в отверстие сферического подпятника 10, воздействуя на микропереключатель 12 сигнализирующий в этом случае о неза нятости руки оператора. Рукоятка управления имеет девять положений, обозначенных на фиг. 1 и 2, из которых положение О - исходное положение, положения а, и г, д,е - соответственно, например, вгеред и назад с тремя позициями регулирования электропривода в каждом направлении, положения ж и з управление другим электроприводом (или устройством), к примеру движе вправонием захватного органа и влево. Любое из указанных восьми рабочих положений рукоятки 6 управления в случае необходимости может быть зафиксировано дополнительными,отверстиями в сферическом подпятнике 10. Направляющая 24 поворота, ограничивающая движение рукоятки 6 управления, может быть разной по форме паза 25, четьфе варианта которой представлены на фиг. 5. Вариант 1 - последовательное управJ направлениях: вперед или ление назад , или вправо, или влево. Вариант 2 - одновременное управ вперед-вправолениё в направлениях: или вперед-влево, или назад-вцра назад-влевово , или назад-влево с возможностью также и последовательного управления в этих направлениях. Вариант 3 - последовательное направлениях: вперед управление в назад. или вправо. или Вариант 4 - одновременное управ, в направлениях: вперед-впраназад-вправод или с возмож- ностью также и последовательного управления в зтих направлениях. Использование командоаппарата позволяет включать последовательно требуемое множество микропереключателей, соответствующее заданному в определенном положении рукоятки управления, не отключая микропереключатели, включенные на предьщущих позициях рукоятки управления, и при возврате рукоятки управления в исходное положение производить последоваельное отключение микропереключатеей, оставляя при этом последующие а пути движения рукоятки включенны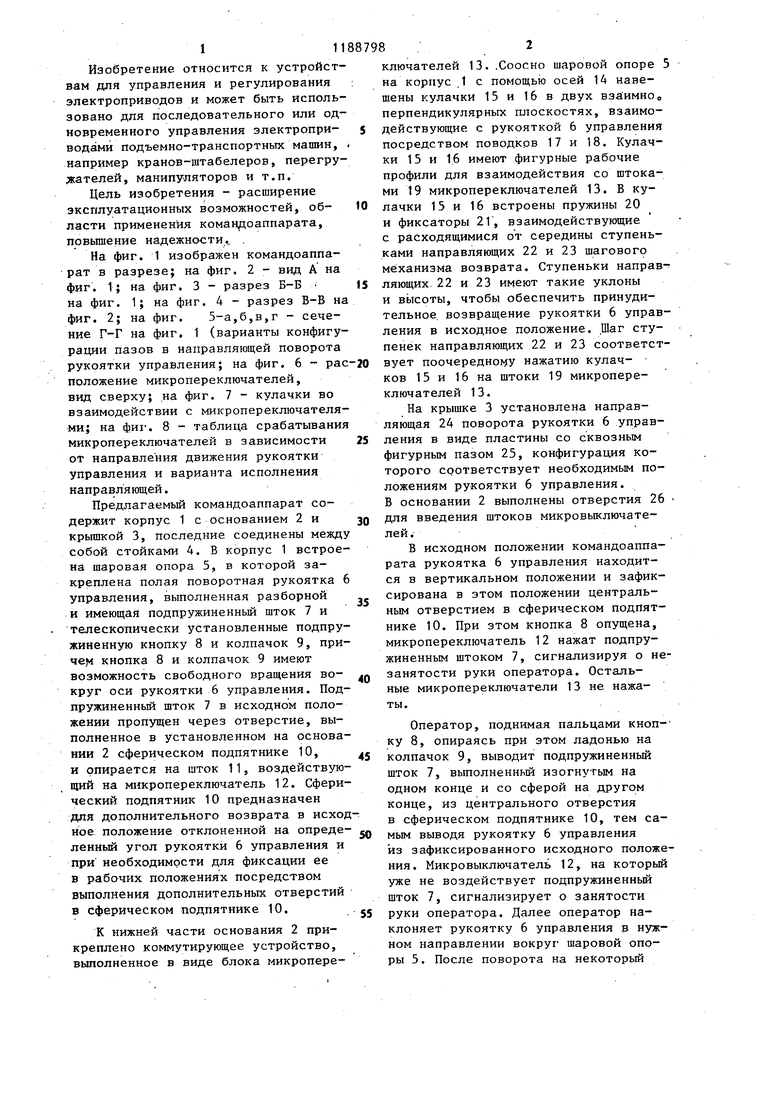
| название | год | авторы | номер документа |
|---|---|---|---|
| Командоаппарат | 1987 |
|
SU1529302A1 |
| РОЛИКОВЫЕ КОНЬКИ | 2003 |
|
RU2252809C2 |
| ПОДЪЕМНИК ДЛЯ ПОГРУЖЕНИЯ ИНВАЛИДА В БАССЕЙН | 1993 |
|
RU2063376C1 |
| Устройство для изготовления гиперболоидных контактных узлов Карташева В.В. | 1987 |
|
SU1554058A1 |
| Устройство ввода команд для системы управления экскаватором | 2023 |
|
RU2809499C1 |
| РОЛИКОВЫЕ КОНЬКИ (ВАРИАНТЫ) | 2005 |
|
RU2295992C2 |
| РУЧКА УПРАВЛЕНИЯ | 1995 |
|
RU2085993C1 |
| Механизм управления раздаточной коробкой передач транспортного средства | 1983 |
|
SU1115931A1 |
| Стенд для сборки и вращения тяжелове ных цилиндрических изделий в процессе сварки | 1973 |
|
SU518310A1 |
| Устройство для тренировки пловцов | 1986 |
|
SU1395343A1 |
1. КОМАНДОАППАРАТ, содержащий корпус, основание, полую рукоятку управления с колпачком и с размещенным в ней подпружиненным штоком, установленную шарнирно в корпусе, .направляющую с пазом, микровыключатели, закрепленные на основании, отличающийся тем, что, с целью расширения эксплуатационных возможностей, повышения надежности, он снабжен поводками, кулачками е различными профилями по числу микровыключателей, сферическим подпятником с отверстием, предназначенным для фиксации в нем рукоятки управления, подпружиненными фиксаторами и направляющими со ступенчатой поверхностью для подпружиненных фиксаторов, основание выполнено с отверстиями по числу микровыключателей, в каждый из которых введен шток одного из микровыключателей, кулачки закреплены на корпусе с возможностью поворота относительно него во взаимно перпендикулярных плоскостях, поводки закреплены на кулачках во взаимно перпендикулярных плоскостях, при зтом рукоятка управления установлена так, что имеет возможность взаимодействия по крайней мере с одним или с несколькими поводками, а ее подпружиненный шток имеет возможность перемещения по сферическому подпятнику, а каждый из кулачков установлен с возможностью взаимодействия с одним из микровыключателей и связан с одним из подпружиненных фиксаторов. 2.Командоаппарат по п. 1, отличающийся тем, что руко(П ятка управления снабжена кнопкой, которая расположена соосно с колпачком с возможностью перемеще1Й я относительно него и взаимодействия с подпружиненным штоком рукоятки управления, причем указанный подпружиненный шток выполнен с одним отогнутым 00 00 концом, а другой его конец имеет сферическую форму. l 3.Командоаппарат по п. 1, о тСО 00 личающийся тем, что паз направляющей для рукоятки управления выполнен прямоугольной формы со скругленными углами или фигурной формы. 4.Командоаппарат по п. 1, о т51ичающийся тем, что подпятник выполнен с дополнительными отверстиями для фиксации в них указанной полой рукоятки в других положениях.
5-5
В-В
2J
(pus.f
Г-Г
CiL
-24 М
57О
г-г
г-г
Фиг. 6
Вправо
Влево
Scrr-V
г л
т ш
Фиг.7
| Командоаппарат | 1977 |
|
SU686097A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3639705, кл | |||
| Мяльно-трепальный станок для обработки тресты лубовых растений | 1922 |
|
SU200A1 |
