(Л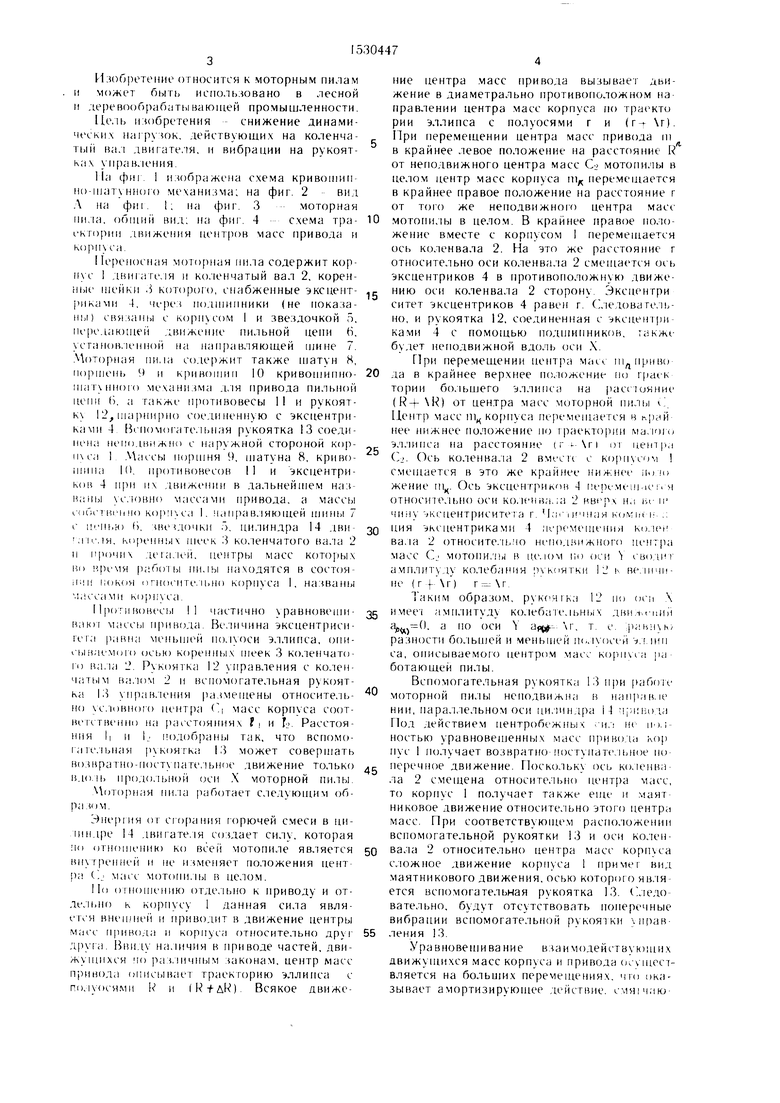
| название | год | авторы | номер документа |
|---|---|---|---|
| Переносная моторная пила | 1990 |
|
SU1794650A1 |
| БЕЗРЕДУКТОРНАЯ МОТОРНАЯ ПИЛА | 2003 |
|
RU2246395C2 |
| Переносная моторная пила | 1976 |
|
SU648403A1 |
| Переносная моторная пила | 1978 |
|
SU695815A1 |
| Переносная моторная пила | 1977 |
|
SU613893A1 |
| Переносная моторная пила | 1976 |
|
SU844278A1 |
| ПЕРЕНОСНАЯ МОТОРНАЯ ПИЛА | 1974 |
|
SU419376A1 |
| Переносная моторная пила | 1976 |
|
SU648400A1 |
| Переносная моторная пила | 1989 |
|
SU1717348A1 |
| БЕНЗИНОМОТОРНАЯ ПИЛА | 2005 |
|
RU2281854C1 |
Изобретение относится к лесной и деревообрабатывающей промышленности. Цель изобретения - снижение динамических нагрузок, действующих на коленчатый вал двигателя, и вибрации на рукоятках управления. Переносная моторная пила содержит корпус 1 двигателя, коренные шейки 3 коленчатого вала и звездочку 5, передающую движение пильной цепи 6, установленной на направляющей шине 7. Моторная пила содержит также кривошипно - шатунный механизм, противовесы 11 и рукоятку 12, шарнирно соединенную с эксцентриками 4. Величина эксцентриситета эксцентриков равна меньшей полуоси эллипса, описываемого осью коренных шеек 3 коленчатого вала 2. В результате этого при работе моторной пилы рукоятка 12, соединенная с эксцентриками 4 с помощью подшипников, неподвижна вдоль продольной оси пилы. Уравновешивание взаимодействующих движущихся масс корпуса и привода оказывает амортизирующее действие, смягчающее динамические нагрузки на коленчатый вал. Это позволяет повысить производительность и уменьшить вибрацию на рукоятках управления. 4 ил.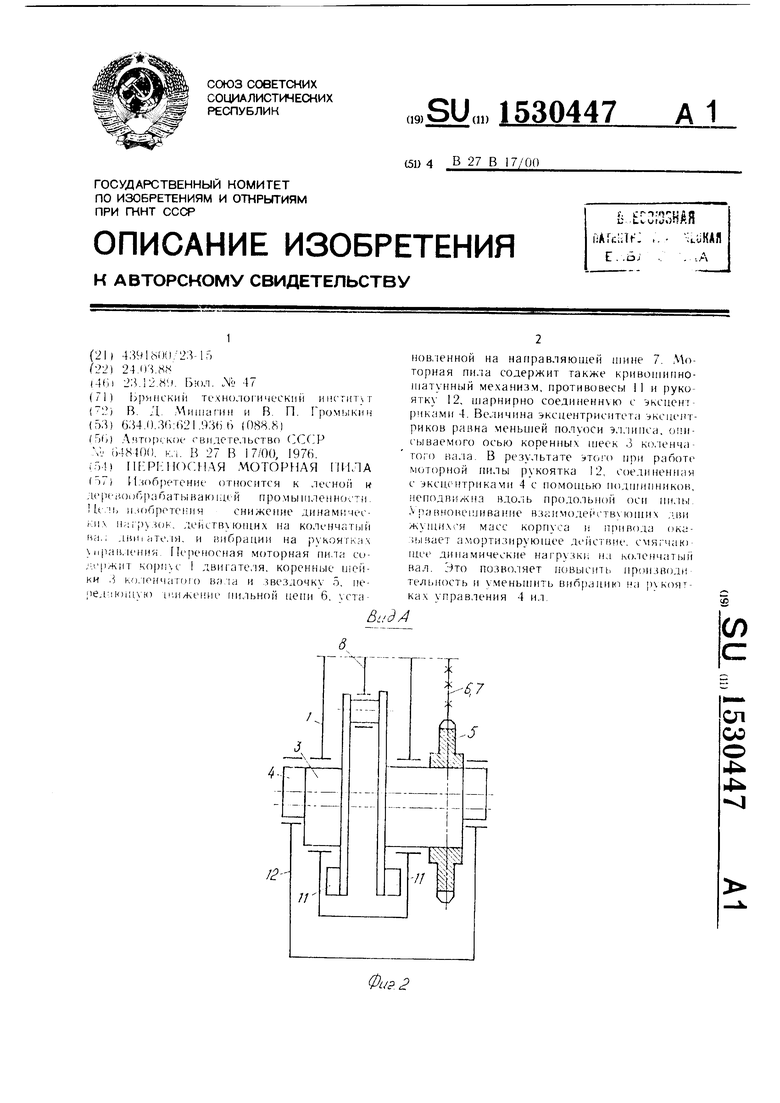
СП
СО
о 1
0.2
Изобретение относится к моторным пилам и может быть исгюль:ювано в лесной и леревообрабат1 1ваю|цей промышленности.
Цель изобретения - снижение динамических нагрузок, действующих на коленча- Tbiil вал двигате. 1я, и вибрации на рукоятках у||)ав.1ения,
11а фиг. 1 изображена схема криво1ии11 но-шатунного механизма; на фиг. 2 вид Л на фи1. 1; на фиг. 3моторная
lUKia. o6iiuiii вид; на фи1 . 4 схема тра- 1.-кг()(1И11 движения иент|1()в масс привода и Kopiiv СИ.
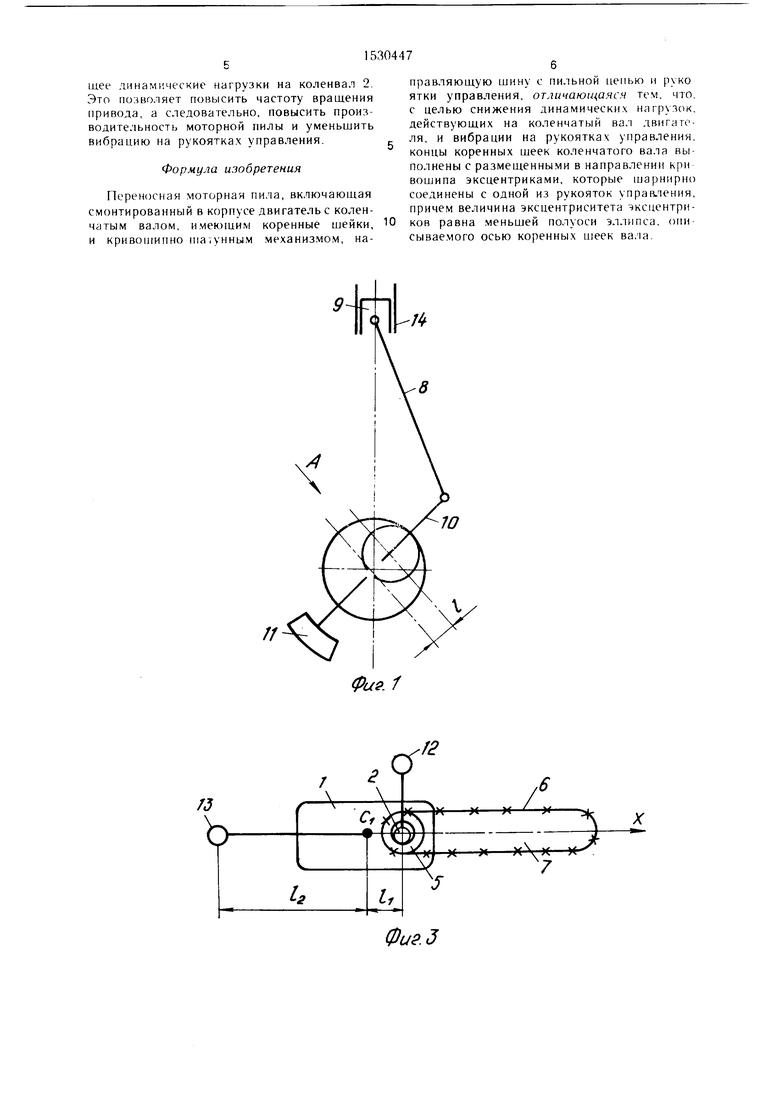
11е)ен()сная моторная пила содержит корпус 1 двигате,1я и ко. 1енчатый вал 2, коренные iiieifKH 3 которою, снабженные эксцент- риками 4, чере.з П()дн1инники (не ноказа- н|,1) связаи| | с ()М I и звездочкой 5, Me|)c.iaK)iHeii движение пильной 1.1ени Н. усганов.к нной на направляющей шине 7. .Моторная пила содержит также 8, MopnieHb 9 и кривошип 10 кривои1ипно- шатчнного механизма д.т привода пильной цени (). а также противовесы II и рукоятшрнирно соединенную с эксиентрик 1
4 Всп()м)гате.11)Ная рукоятка 13соеди- HiMia непгцвижмо с наружной стороной кор- 1 .V accbi нор1ння 9, н атуна 8, криво- 1нниа 1(1. противовесов 11 и зксцентри- кои 4 11)и н движении в дальнейшем n;:tibi ус.ювно массами привода, а массы К1()гт 1-|1ио 1. 1а11рав.1яклцей 1ИИН1 1 7 с iii. iibH) (). ЗВ1МДОЧКН Г), цилиндра 14 дви- мкмя. ко)енны 1неек 3 коленчатого Ba. ia 2 и прочих де1а;1с-й. центры масс которых Ri , )апо || | пилы находятся в состоя- iiiiif покоя относите. И,но корпуса I, на.зван1 1 м..ссами корпуса.
I 1 частично равновеши- Ве/шчина эксцентриси- полуоси эллипса, опитых HieeK 3 коленчато- 1 2 управления с коленI Iponi повесы вак) массы привода, iera равна меньше ciiiiiaeMiMi) (к ьк) коре го Ba.ia 2. Рукоятка
чатым валом 2 и вспомогательная рукоятка 13 управления |)а.смешены относите.1Ь- но словн()го центра С масс корпуса соответственно на расстояниях f| и Го. Расстояния h и L. подобраны так, что вспомо- 1аге.1ьная рукоягка 13 может совери1ать В()звратно-(И)сту11аге,1ьное движение только вдо.1ь продо,1ьной (Х и X моторной пилы.
HH.ia работает следующим обра.ом.
1-)нер1Ия от С1())ания горючей смеси в ци- шндре 14 двигате,1Я создает силу, которая По отношению ко Bc eii мотопиле яв,тяется впугреиией п не и.зменяет положения центра C.j масс MOToiHi.Hji в целом.
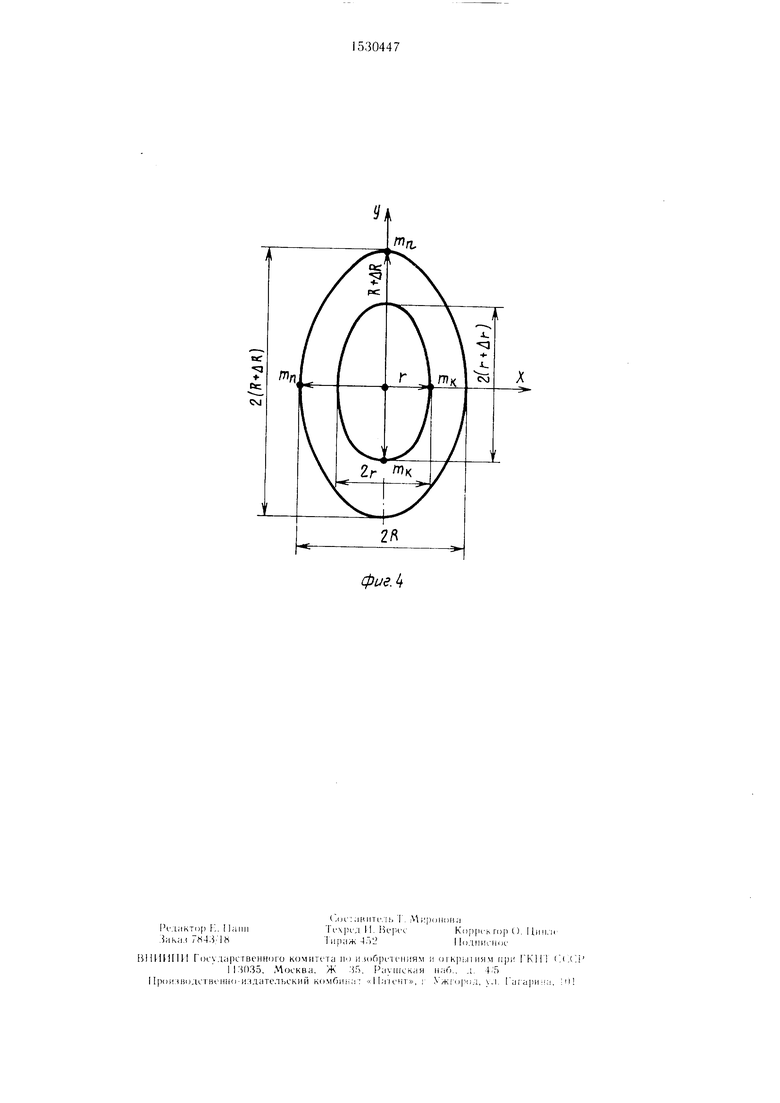
По oTHonieHHK) отде.1ьио к ириводу и отдельно к корпусу 1 данная сила является BHen.meii и приводит в движение центры масс привода п корпуса относительно друг дру1а. Вви.чу наличия в приводе частей, движущихся 1о различным законам, центр масс привода onnciiiBacT траекторию эллипса с ПОЛУОСЯМИ 1 и (RfAR). Всякое движе0
g 0
5
0
5
0
5
0
5
1 нриво (10 r|jacK
ние центра .масс привода вызывает движение в диаметрально противоположном на правлении центра масс корпуса по тра(кто рии эллипса с полуосями г и (г г). При перемещении центра масс привода ni в крайнее левое положение на расстг)яние R от неподвижного центра масс Ci; мотопи, 1ы в целом центр масс корпуса ш перемешается в крайнее правое положение на расстояние г от того же неподвижного центра масс MOTOiui,ibi в целом. В крайнее правое ноло- жение вместе с корпусом 1 перемешается ось коленвала 2. Па это же расстояние г относительно оси коленвала 2 смешается ось эксцентриков 4 в противоположную движению оси коленвала 2 сторону Экспентри ситет эксцентриков 4 равен г. (1|е.довагел1 - но, и рукоятка 12, соединенная с эксце1гг)и- ками 4 с помощью подшипников, также будет неподвижной вдоль оси X.
При перемещении масс да в крайнее верхнее гкможение тории бо,1ьшего эллипса на laccKjwHHC () от центра масс моторной пил)1 :, Центр масс ni ко()пуса пе 1емеп1ается в -,|)ай нее нижнее положение н() граекторки ма.юго эллипса на расстояние (г t Г1 DT центр, (. Ось коленва.та 2 вмесг( с KojiiiycoM 1 смещается в это же крайнее нижнее iio и/ жение 111. Ось эксцентриков 4 перемеш-кт. н OTHOcme.ibHO оси коленна.;а 2 вверх н.; i-,i п чину -)КСцентриситета г. Ча.-iifuiaH Kowiif ii. .; ция эк1 центриками 4 aepeMeiiienH i ко.им- вала 2 относите. ibMo не 1од лижного (1а масс Cj мотопи.чы в целом по оси У сво.чиг амплиту..1у колебания рх коитки 12 г ве.тнчи- не (г f г) г г.
Таким образом, рукоягка 12 но оси . имее амплитуду колебательных дви.и-иий а 0. а по оси У г, т. е. ) разности большей и меньшей п(.,1 осей э.т|ип са, О1шсываемог) центро.м .масс ботаюшей пилы.
Вспомогательная рукоятка 13 при )аботе моторной ПИ.1Ы неподвижна в iaiipaB. le НИИ, пара,1лельном оси цилинд)а 14 ч;;1:во1а Под действием центробежных ил Н( но.:- ностью ypaBHOBenjeHHbix масс привода ко}) пус 1 получает возвратно поступате,1ьное по перечное движение. Поскольку ось ко,1енва ла 2 с.мещена относительно центра Vticc, то корпус 1 получает также еще н маят никовое движение относите.тьно этого центра масс. При соответствующем расположении вспомогательной рукоятки 13 и оси коленвала 2 относительно центра масс корпуса сложное движение корпуса 1 примег вид маятникового движения, осью которого является вспо.могательная рукоятка 13. (Следовательно, будут отсутствовать поперечные вибрации вспомогательной рукоятки iipaB- ,1ения 13.
Уравновешивание взаимодействующих движущихся масс корпуса и привода осуществляется на больших перемещениях, ч го оказывает амортизирующее действие. смя1чаю
щее динамические нагрузки на коленвал 2. Это по:шоляет повысить частоту вращения привода, а следовательно, повысить производительность моторной пилы и уменьшить вибрацию на рукоятках управления.
Формула изобретения
Переносная моторная пила, включаюпдая смонтированный в корпусе двигатель с коленчатым валом, имеющим коренные шейки, и криво1иипно ша.унным механизмом, на
правляющую шину с пильной цепью и руно ятки управления, отличающаяся тем, что, с целью снижения динамических нагрузок, действующих на коленчатый ва. двигателя, и вибрации на рукоятках управления, концы коренных шеек коленчатого вала выполнены с размещенными в направлении кри вошипа эксцентриками, которые шарнирно соединены с одной из рукояток управления, причем величина эксцентриситета чксцентри- ков равна меньшей полуоси эллипса, описываемого осью коренных шеек вала.
/4
3
Фи&. /
фиеЛ
