1
(61) 871018
(21)4302446/31-27
(22)31.08.87
(46) 23.12.89. Бкш.№ 47
(71)Институт проблем машиностроения АН УССР
(72)В„А„Логвин, А.П,Кудряш и А.Н.Гоц
(53)621.822(088„8)
(56)Авторское свидетельство СССР № 871018, кл. G 01 М 13/04, 1981.
(54)МАШИНА ДЛЯ ИСШТАНИЯ ГИДРОДИНАМИЧЕСКОГО ПОДШИПНИКА СКОЛЬЖЕНИЯ
(57)Изобретение относится к машино- строению и позволяет повысить точность и расширить диапазон режимов испытаний. На станине жестко закреплен гидрораспределитель с регулирующим устройством, кинематически связанный с механизмом проворота валов и гидравлически - с механизмом нагружения. Выход электронного блока управления дополнительно соединен с регулирую- 1(ШМ устройством гидрораспределителя. При проведении испытаний изменение аьэтлитуды внешней динамической нагрузки осуществляют одновременно с изменением продолжительности ее действия на подшипник по углу поворота вала путем регулирования величины щели в гидрораспределителе, через которую рабочая жидкость проходит в гидроцилиндр. 1 з.п. ф-лы, 5 ил.
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ испытания гидродинамического подшипника скольжения | 1987 |
|
SU1530970A2 |
| Машина для испытаний гидродинамического подшипника скольжения | 1979 |
|
SU871018A1 |
| Способ испытания гидродинамического подшипника скольжения | 1990 |
|
SU1784850A1 |
| ГИДРОПРИВОД МЕХАНИЗМА ПОВОРОТА СТОЙКИ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2252911C2 |
| ПРЕСС ГИДРОПУЛЬСАЦИОННО-ШАГОВОГО ДЕЙСТВИЯ | 1994 |
|
RU2101121C1 |
| ПРОБИВНОЙ ПРЕСС | 1998 |
|
RU2137596C1 |
| Способ испытания гидродинамического подшипника скольжения | 1979 |
|
SU868413A1 |
| ЧЕТЫРЕХЛИНЕЙНЫЙ ДРОССЕЛИРУЮЩИЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С ПЛОСКИМ ПОВОРОТНЫМ ЗОЛОТНИКОМ И ЦЕНТРАЛЬНЫМ ПРИВОДОМ МОДУЛЬНОГО ИСПОЛНЕНИЯ ДЛЯ ВСТРОЕННОГО МОНТАЖА И ВЫСОКИХ ДАВЛЕНИЙ | 2008 |
|
RU2375610C1 |
| Устройство для определения коэффициента трения смазочных материалов | 2021 |
|
RU2769649C1 |
| Способ определения коэффициента трения смазочных материалов | 2021 |
|
RU2766943C1 |
Изобретение относится к машиностроению и позволяет повысить точность и расширить диапазон режимов испытаний. На станине жестко закреплен гидрораспределитель с регулирующим устройством, кинематически связанный с механизмом проворота валов и гидравлически - с механизмом нагружения. Выход электронного блока управления дополнительно соединен с регулирующим устройством гидрораспределителя. При проведении испытаний изменение амплитуды внешней динамической нагрузки осуществляют одновременно с изменением продолжительности ее действия на подшипник по углу поворота вала путем регулирования величины щели в гидрораспределителе, через которую рабочая жидкость проходит в гидроцилиндр. 1 з.п. ф-лы, 5 ил.
Изобретение относится к машиностроению, может быть использовано при проведении испытаний гидродинамических подшипников скольжения и является усовершенствованием машины по авт. св. № 871018.
Цель изобретения - повышение точности и расширение диапазона режимов испытаний.
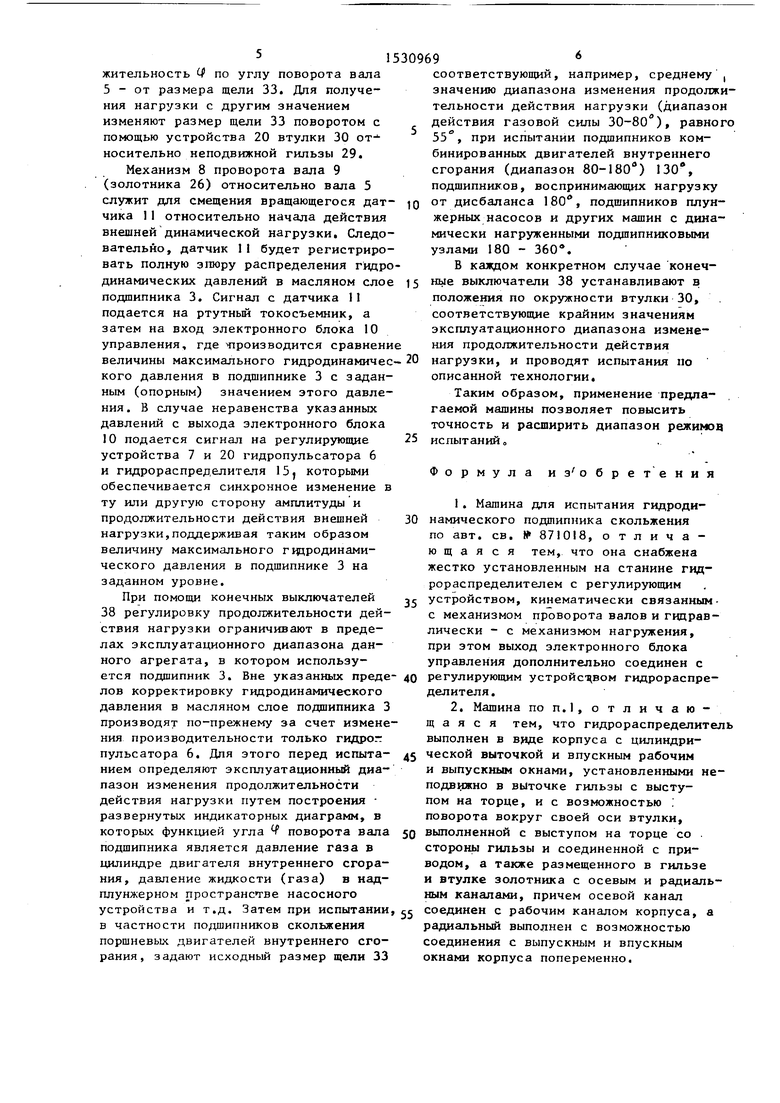
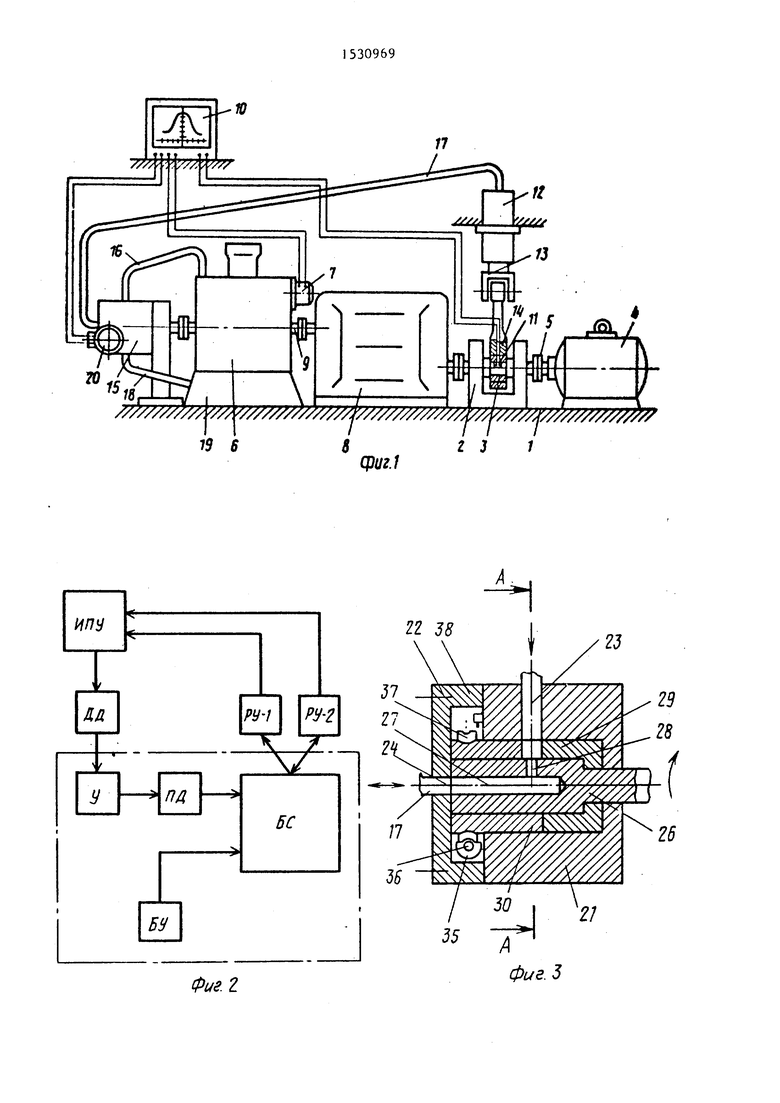
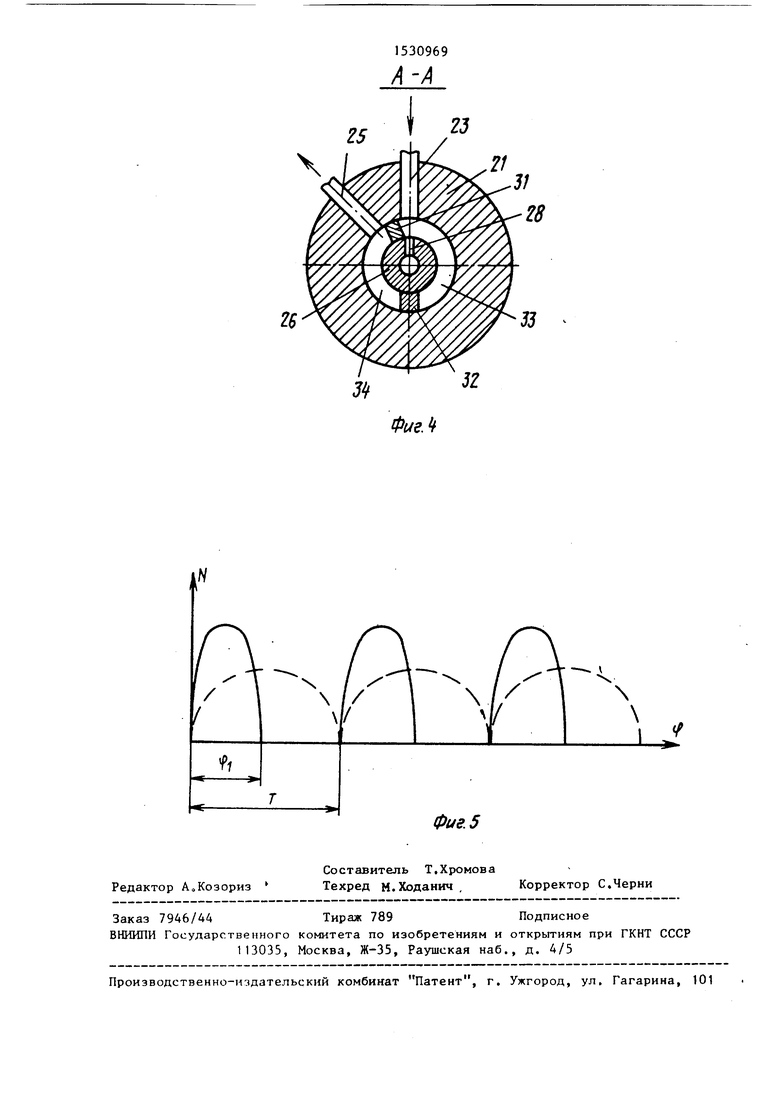
На фиг.1 изображена схема машины; на фиг.2 - функциональная схема управления машиной; на фиг.З - регу- лируемьй гидрораснределитель, продоль ный разрез; на фиг.4 - сечение А-А на фиг.З; на фиг.5 - диаграмма нагружения испытуемого подшипника по углу поворота сопряженного с ним вала на известной (штриховая линия) и предлагаемой машинах (сплошная линия),
Машина (фиго) содержит станину , жестко закрепленное на ней устройство 2 для фиксации испытуемого под- шипника 3, привод 4 вала 5 подшипника 3, механизм нагружения, состоящий из гидроимпульса 6 прямого возбуждения с установленным на нем регулирующим устройством 7, а также механизм 8 проворота вала 9 механизма нагружения относительно вала 5 подшипника 3 и электронный блок 10 для контроля и поддержания в масляном слое подшипника 3 заданной максимальной величины гвдродинамического давления, вход которого соединен посредством ртутного токосъемника (не указан) с установленным в валу 5 датчиком 11 давления, а выход - с регулирующим устройством 7 механизма нагружения.
СП
со о ;о
О)
со
rvj
Механизм нагружения содержит также гидроцилиндр 12, жестко закрепленный на станине 1, шток 13 и шарнирно связанный с ним шатун 14.
Кроме того, машина содержит жестко закрепленный на станине 1 регулиру емый гидрораспределитель 15, который кинематически связан через гидропульсатор 6 с механизмом 8 проворота валов и гидравлически при помощи трубопроводов 16 и 17 напорной магистрали соединен с гидропульсатором 6 и гидроцилиндром 12, а трубопроводо
18разгрузочной магистрали с емкостью
19для рабочей жидкости. Выход электронного блока 10 управления дополнительно соединен с регулирующим устройством 20 гидрораспределителя
Электронный блок 10 обведен штри- ховой линией и включает: У - усилитель сигнала, например, напряжения - и, подаваемого датчиком 11 (ДЦ), ПД - пиковый детектор для выделения максимального значения гидродинамического давления в масляном слое подшипника 3 выраженного в напряжении U, БУ - блок установки опорного значения давления или и or, которым должно производиться сравнение К. блок сравнения напряжений U,, и мдкс выработки управляющих сиг- налов на регулирующие устройства 7 и 20 (РК-1, РУ-2).
Гидрораспределитель 15 (фиг.1, 3 и 4) содержит корпус 21 с крышкой 22, в которых выполнены впускное 23, рабочее 24 и выпускное 25 окна. В корпусе 21 установлен с возможностью вращения золотник 26, кинематически через гидропульсатор 6, связанный с механизмом 8 проворота валов и имеющ осевой 27 и радиальный распределительный 28 каналы. Между корпусом 21 и золотником 26 установлены контакти
рующие гильза 29, закрепленная
неподвижно, и втулка 30, имеющая возможность поворота вокруг своей оси. На контактирующих торцах гильзы 29 и втулки 30 выполнены выступы 31 и 32,
о Q
5
0
5
образующие регулируемые щели 33 и 34.
Регулирующее устройство 20 гидрораспределителя 15 включает червячную передачу, червяк 35 которой зафиксирован на валу 36 привода регулирующего устройства 20 (фиг.1), закрепленного на корпусе 21, а червячное колесо 37 выполнено с втулкой 30. Регулирующее устройство гидрораспределителя 15 имеет также два конечных выключателя 38, закрепленных на корпусе 21 и электрически связанных с приводом регулй- рующего устройства 20. Конечные выключатели 38 могут быть установлены в различных положениях по периметру втулки 30 и имеют возможность контактирования с ее выступом (не указан), а следовательно, выключения привода регулирующего устройства 20 (без отключения его реверса), ограничивая, таким образом, в процессе испытания подшипника 3 диапазон регулирования продолжительности действия нагрузки по углу поворота вала 5.
Машина работает следующим образом,
Включают привод 4, вращение от которого передается на вал 5 и через механизм 8 на вал 9 гидропульсатора 6 и золотник 26 гидрораспределителя .15. Давление рабочей жидкости, создаваемое с определенной амплитудой пульсаций в гидропульсаторе 6, передается по напорному трубопроводу 16 в гидрораспределитель 15, где рабочая жидкость через впускное окно 23 поступает в щель 33, которая при каж-( дом обороте золотника 26 совмещается с распределительным окном 28 указанного золотника 26, тем самым обеспечивая прохождение импульса рабочей жидкости через канал 27 и рабочее окно 24 в напорный трубопровод 17 и гидроцилиндр 12. Далее нагрузка через шток 13 и шатун 14 передается на подшипник 3. При совмещении распределительного окна 28 золотника 26 с щелью 34 также периодически обеспечивается прохождение импульса рабочей жидкости в обратном направлении через рабочее окно 24 и канал 27, но уже в выпускное окно 25 и по разгрузочному трубопроводу 18 - в емкость 19. Период Т (фиго5) следования импульсов создаваемой таким образом нагрузки N зависит от частоты вращения вала привода 4, а также продол-жительность по углу поворота вала 5 - от размера щели 33. Для получения нагрузки с другим значением изменяют размер щели 33 поворотом с помощью устройства 20 втулки 30 от- носительно неподвижной гильзы 29.
Механизм 8 проворота вала 9 (золотника 26) относительно вала 5 служит для смещения вращающегося датчика 11 относительно начала действия внешней динамической нагрузки. Следовательно, датчик 1I будет регистрироВ каждом конкретном случае конечвать полную зпюру распределения гидродинамических давлений в масляном слое 15 выключатели 38 устанавливают в подшипника 3. Сигнал с датчика П положения по окружности втулки 30, подается на ртутный токосъемник, а затем на вход электронного блока 10 управления, где чтроизводится сравнение
соответствующие крайним значениям эксплуатационного диапазона изменения продолжительности действия
величины максимального гидродинамичес- 20 нагрузки, и проводят испытания по
кого давления в подшипнике 3 с задан- описанной технологии.
ным (опорным) значением этого давле- Таким образом, применение предлания. В случае неравенства указанных
давлений с выхода электронного блока
гаемои машины позволяет повысить точность и расширить диапазон режимо
IО подается сигнал на регулирующие устройства 7 и 20 гидропульсатора 6 и гидрораспределителя 15, которыми обеспечивается синхронное изменение ту или другую сторону амплитуды и продолжительности действия внешней нагрузки,поддерживая таким образом величину максимального гвдродинами- ческого давления в подшипнике 3 на заданном уровне.
При помощи конечных выключателей 38 регулировку продолжительности действия нагрузки ограничивают в пределах эксплуатационного диапазона данного агрегата, в котором используется подшипник 3. Вне указанных преде- дО регулирующим устройством гидрораспре- лов корректировку гидродинамического делителя.
давления в масляном слое подшипника 3 2. Машина по п.1, о тл ич аю- производят по-прежнему за счет измене- щ а я с я тем, что гидрораспределитель ния производительности только гидрог выполнен в внде корпуса с цилиндри- пульсатора 6. Для этого перед испыта- 45 ческой выточкой и впускным рабочим нием определяют эксплуатационный дна- и выпускным окнами, установленными не- пазон изменения продолжительности подвижно в вЫточке гильзы с высту- действия нагрузки путем построения пом на торце, и с возможностью . развернутых индикаторных диаграмм, в поворота вокруг своей оси втулки, которых функцией угла f поворота вала 50 выполненной с выступом на торце со .
стороны гильзы и соединенной с приводом, а также размещенного в гильзе и втулке золотника с осевым и радиальным каналами, причем осевой канал устройства и т.д. Затем при испытании, 55 соединен с рабочим каналом корпуса, а в частности подшипников скольжения радиальный выполнен с возможностью поршневых двигателей внутреннего его- соединения с выпускным и впускным рання, задают исходный размер щели 33 окнами корпуса попеременно.
подшипника является давление газа в цилиндре двигателя внутреннего сгорания, давление жидкости (газа) в над- плунжерном пространстве насосного
0
соответствующий, например, среднему , значению диапазона изменения продолжительности действия нагрузки (диапазон действия газовой силы ЗО-вО ), равного 55, при испытании подшипников комбинированных двигателей внутреннего сгорания (диапазон 80-180) 130, подшипников, воспринимающих нагрузку от дисбаланса 180, подшипников плунжерных насосов и других машин с динамически нагруженными подшипниковыми узлами 180 - 360.
В каждом конкретном случае конеч5 выключатели 38 устанавливают в положения по окружности втулки 30,
выключатели 38 устанавливают в положения по окружности втулки 30,
соответствующие крайним значениям эксплуатационного диапазона изменения продолжительности действия
гаемои машины позволяет повысить точность и расширить диапазон режимов
испытаний,
Формула из обре тения
t70
9
////////////Y///
///////////////: ///////////////л /л
w//Y////.
19 68231
сриг.1
ЬУ
Фиг. 2
11
4HIJ/ rtf
r M./
23
.7.
ч X. . X
Zi
36 3
21
35
фиг. J
33
ФиеЛ
