77
Ю 9 25
г 15 го
(Л
СП
оо 1ч:)
N
05 СП)
Фиг.З
приводной барабан 20 со шкивами, смонтированными соосно барабану 20, Р 18 и Р 19 роликового К 14„ Шкивы охватывают ремни 28. От барабана 20 приводятся в движение Р 18 и 19„ Носок 17 размещается между верхним и ниже рас- 4оложенным штучньми грузами, например вшками, и от СЦ 25 осуществляется внедрение К 14 между мешками. Гребен- Q
чатой поверхностью Р 18 приподнимают мешок и перемещают его на Р 19, ас него и барабана 20 мешок подается на К 5. Затем К 14 посредством СЦ 25 пе- ремещается .в направляющих 9 назад и цикл повторяется. Приводные ремни 28 не позволяют при этом отдельным частям мешка провисать между Р 18 и 19. 8 ил.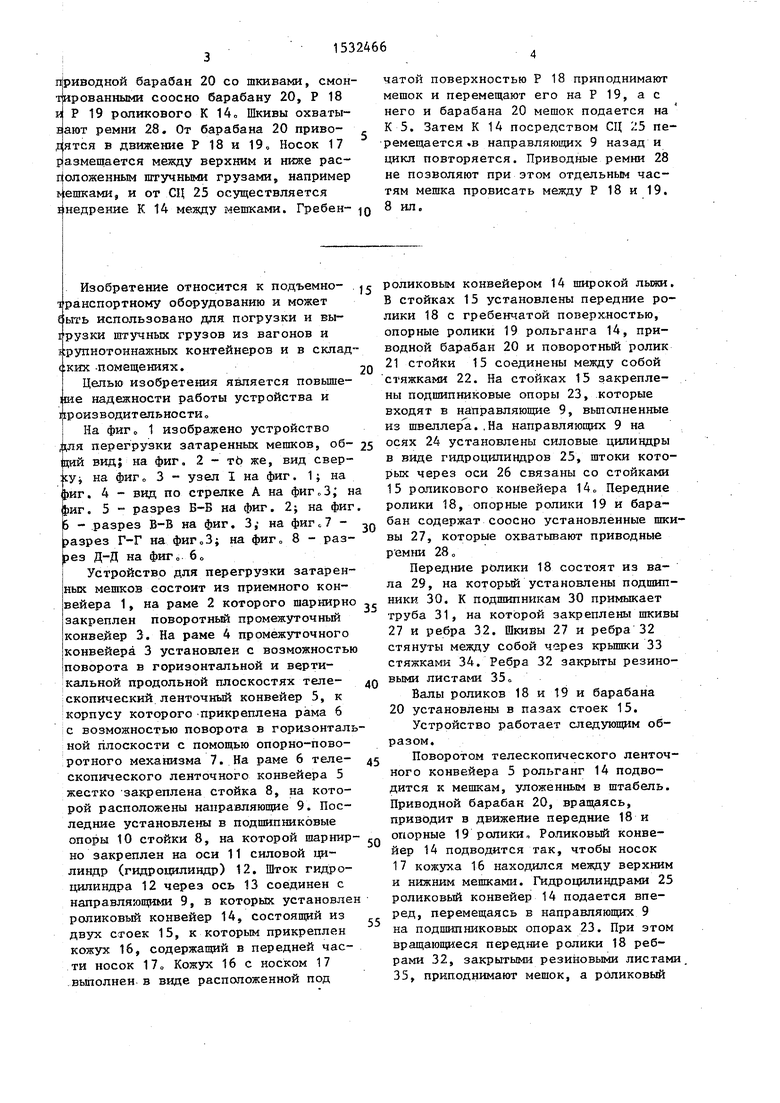
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки штучных грузов | 1989 |
|
SU1722996A1 |
| Устройство для погрузки и разгрузки груза | 1987 |
|
SU1477590A1 |
| МАШИНА ДЛЯ ВЫГРУЗКИ МЕШКОВ ИЗ ВАГОНОВ | 1991 |
|
RU2019487C1 |
| Устройство для выгрузки грузов из вагонов | 1987 |
|
SU1516435A1 |
| УСТРОЙСТВО ДЛЯ УПЛОТНЕНИЯ МЕШКОВ, СОДЕРЖАЩИХ ПОРОШКООБРАЗНЫЕ ИЛИ ГРАНУЛИРОВАННЫЕ МАТЕРИАЛЫ | 2005 |
|
RU2363629C2 |
| Манипулятор для загрузки конвейера мешковыми грузами | 1985 |
|
SU1316949A1 |
| МАШИНА ДЛЯ ПОГРУЗКИ ШТУЧНЫХ ГРУЗОВ В ВАГОНЫ | 1999 |
|
RU2194662C2 |
| Конвейерная система для стабилизации ритма подачи тарно - штучных грузов | 1990 |
|
SU1789456A1 |
| Устройство для пакетирования предметов | 1979 |
|
SU861176A1 |
| Машина для погрузки штучных грузов в вагоны | 1981 |
|
SU962154A1 |
Изобретение относится к подъемно-транспортному оборудованию и позволяет повысить надежность работы устройства и производительность. Устройство содержит ленточный конвейер (К) 5 и сочлененный с ним захватный орган с вращающимся роликом (Р) 18, выполненным с гребенчатой поверхностью, и Р 19. Захватный орган установлен в продольной направляющей 9 и перемещается в ней посредством силового цилиндра (СЦ) 25. Захватный орган выполнен в виде роликового К 14 с расположенным под ним кожухом 16 в виде лыжи с носком 17. Роликовый К 14 имеет приводной барабан 20 со шкивами, смонтированными соосно барабану 20, Р 18 и Р 19 роликового К 14. Шкивы охватывают ремни 28. От барабана 20 приводятся в движение Р 18, 19. Носок 17 размещается между верхним и ниже расположенным штучным грузом, например мешком, и от СЦ 25 осуществляется внедрение К 14 между мешками. Гребенчатой поверхностью Р 18 приподнимают мешок и перемещают его на Р 19, а с него и барабана 20 мешок подается на К 5. Затем К 14 посредством СЦ 25 перемещается в направляющих 9 назад и цикл повторяется. Приводные ремни 28 не позволяют при этом отдельным частям мешка провисать между Р 18 и 19. 8 ил.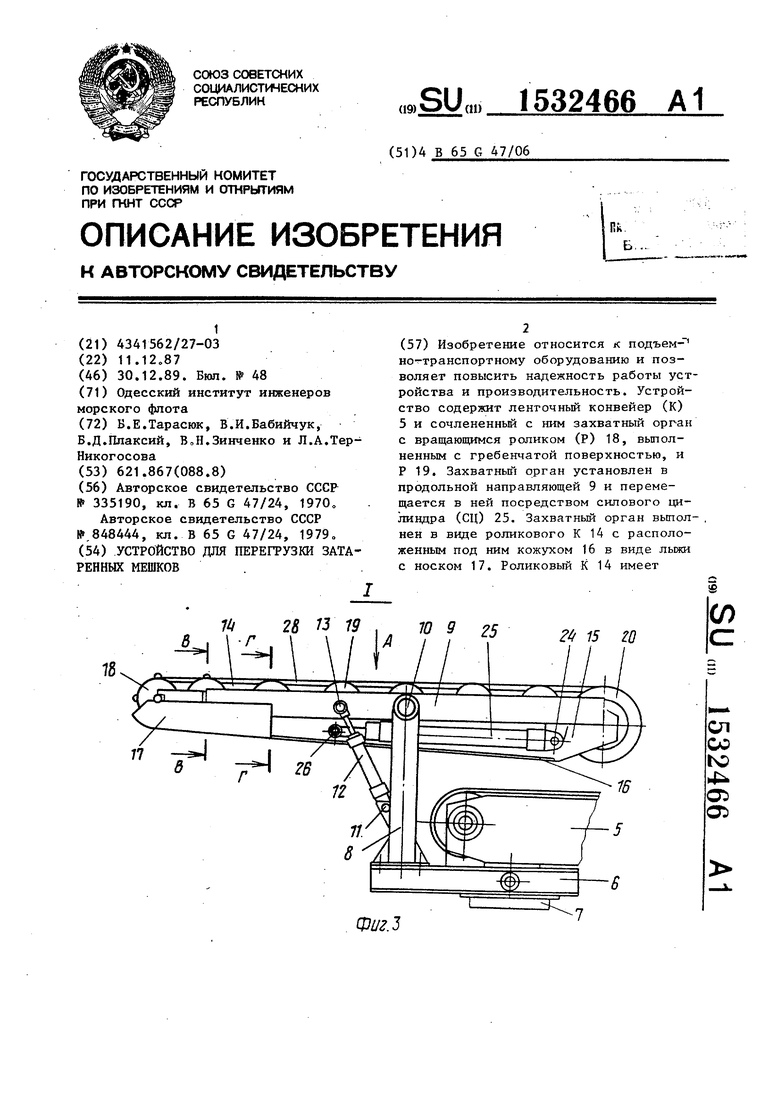
Изобретение относится к подъемно- ранспортному оборудованию и может бьи- ь использовано для погрузки и выгрузки штучных грузов из вагонов и рупнотоннажных контейнеров и в склад ких -помещениях.
Целью изобретения является повьш1е- ше надежности работы устройства и :роизводительностИо
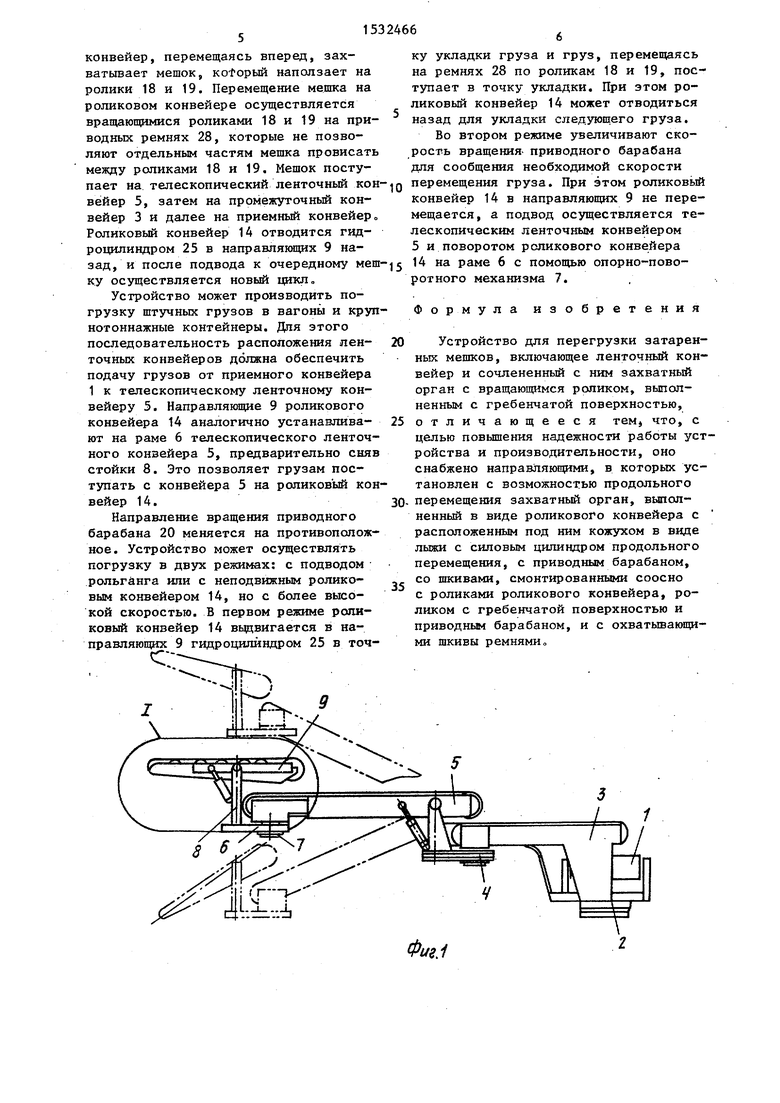
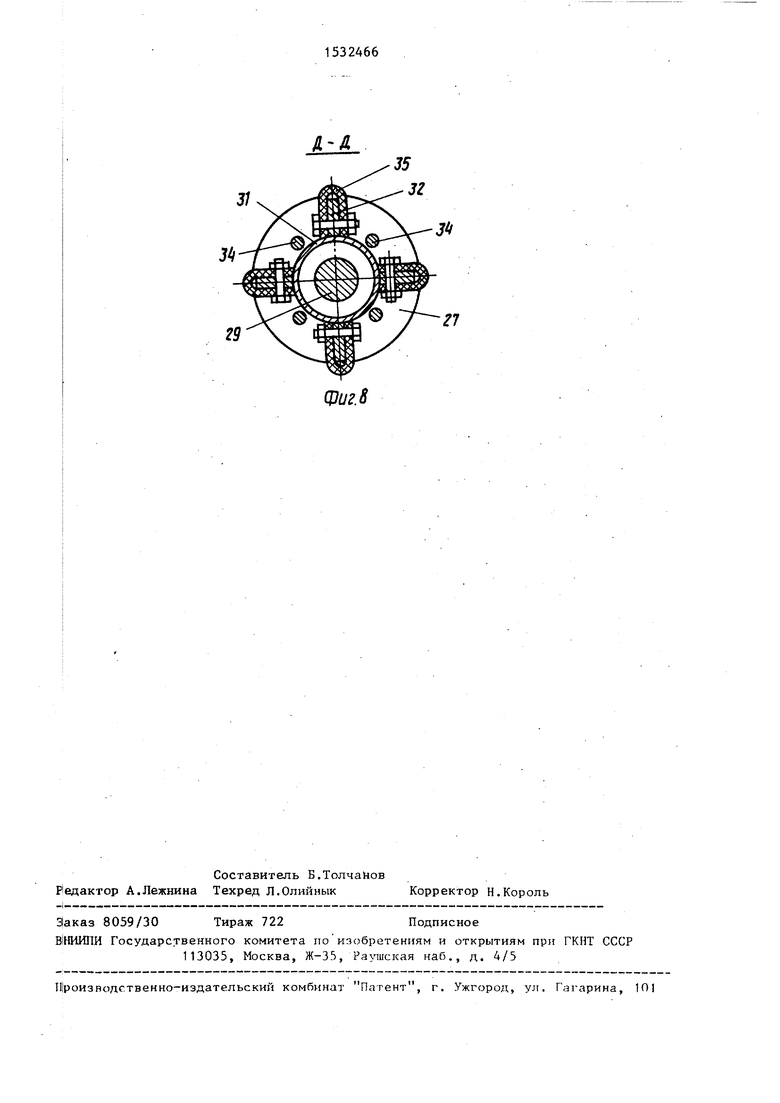
На фиг о 1 изображено устройство для перегрузки затаренных мешков, об- 1щй вид; на фиг, 2 - т6 же, вид свер- cyj на фиг 3 - узел I на фиг. 1; на |)иг. 4 - вид по стрелке А на фиГоЗ н )иг. 5 - разрез В-Б на фиг. 2; на фиг ) - разрез В-В на фиг. 3,- на фиг. 7 - разрез Г-Г на фиг„3; на фиг„ 8 - разрез Д-Д на фиг о 6 о
Устройство для перегрузки затаренных мешков состоит из приемного конвейера 1, на раме 2 которого шарнирно закреплен поворотный промежуточный конвейер 3. На раме 4 промежуточного конвейера 3 установлен с возможностью поворота в горизонтальной и верти- |кальной продольной плоскостях теле- скопический ленточный конвейер 5, к :корпусу которого прикреплена рама 6 с возможностью поворота в горизонтальной плоскости с помощью опорно-поворотного механизма 7. На раме 6 теле- скопического ленточного конвейера 5 жестко закреплена стойка 8, на которой расположены направляющие 9. Последние установлены в подшипниковые опоры 10 стойки 8, на которой шарнир но закреплен на оси 11 силовой цилиндр (гидро1щлиндр) 12. Шток гидроцилиндра 12 через ось 13 соединен с направляющими 9, в которых установле роликовый конвейер 14, состояшрй из двух стоек 15, к которым прикреплен кожух 16, содержащий в передней части носок 17о Кожух 16 с носком 17 .выполнен в виде расположенной под
0
5
д 5 п
5
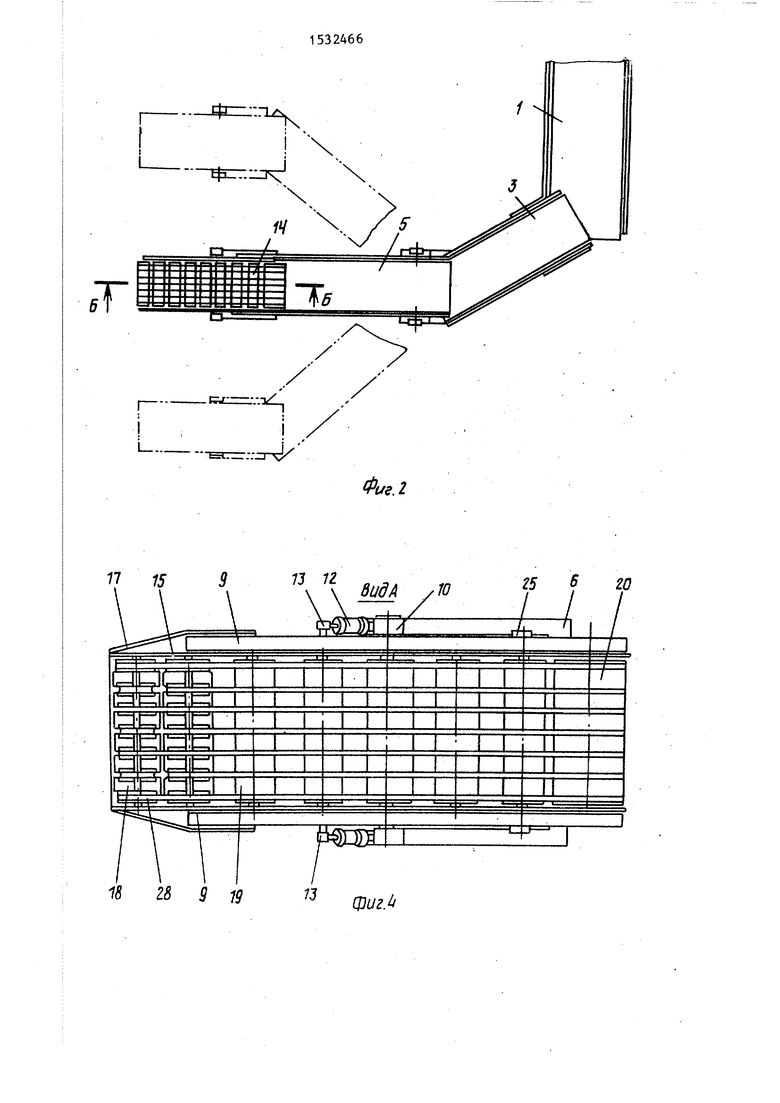
роликовым конвейером 14 широкой лыжи. В стойках 15 установлены передние ролики 18 с гребенчатой поверхностью, опорные ролики 19 рольганга 14, приводной барабан 20 и поворотный ролик 21 стойки 15 соединены между собой стяжками 22. На стойках 15 закреплены подшипниковые опоры 23, которые входят в направляющие 9, выполненные из швеллера.,На направляющих 9 на осях 24 установлены силовые цилиндры в виде гидроцилиндров 25, штоки которых через оси 26 связаны со стойками 15 роликового конвейера 14„ Передние ролики 18, опорные ролики 19 и барабан содержат соосно установленные шкивы 27, которые охватьшают приводные р емни 28 о
Передние ролики 18 состоят из вала 29, на который установлены подшипники 30. К подшипникам 30 примыкает труба 31, на которой закреплены шкивы 27 и ребра 32. Шкивы 27 и ребра 32 стянуты между собой через крьшпси 33 стяжками 34. Ребра 32 закрыты резиновыми листами 35 о
Валы роликов 18 и 19 и барабана 20 установлены в пазах стоек 15.
Устройство работает следующим образом.
Поворотом телескопического ленточного конвейера 5 рольганг 14 подводится к мешкам, уложенным в штабель. Приводной барабан 20, вращаясь, приводит в движение передние 18 и опорные 19 ролики. Роликовый конвейер 14 подводится так, чтобы носок 17 кожуха 16 находди1,ся между верхним и нижним мешками. Гидроцилиндрами 25 роликовый конвейер 14 подается вперед, перемещаясь в направляюш пс 9 на подшипниковых опорах 23. При этом вращающиеся передние ролики 18 ребрами 32, закрытыми резиновыми листами. 35, приподнимают мешок, а роликовый
конвейер, перемещаясь вперед, зах- ватьшает мешок, Kotopiju наползает на ролики 18 и 19. Перемещение мешка на роликовом конвейере осуществляется вращающимися роликами 18 и 19 на приводных ремнях 28, которые не позволяют отдельным частям мешка провисать между роликами 18 и 19. Мешок поступает на телескопический ленточный KOH вейер 5, затем на промежуточный конвейер 3 и далее на приемный конвейер Роликовый конвейер 14 отводится гид- роцилиндром 25 в направляющих 9 назад, и после подвода к очередному меш ку осуществляется новый цикл.
Устройство может производить погрузку штучных грузов в вагоны и крупнотоннажные контейнеры. Для этого последовательность расположения ленточных конвейеров должна обеспечить подачу грузов от приемного конвейера 1 к телескопическому ленточному конвейеру 5. Направляющие 9 роликового конвейера 14 аналогично устанавливают на раме 6 телескопического ленточного конвейера 5, предварительно сняв стойки 8. Это позволяет грузам поступать с конвейера 5 на роликовый конвейер 14.
Направление вращения приводного барабана 20 меняется на противоположное. Устройство может осуществлять погрузку в двух режимах: с подводом рольганга или с неподвижным роликовым конвейером 14, но с более высокой скоростью. В первом режиме роликовый конвейер 14 вьщвигается в направляющих 9 гидроцилйндром 25 в точС:
ку укладки груза и груз, перемещаясь на ремнях 28 по роликам 18 и 19, поступает в точку укладки. При этом роликовый конвейер 14 может отводиться назад для укладки следз ющего груза.
Во втором режиме увеличивают скорость вращения приводного барабана для сообщения необходимой скорости перемещения груза. При этом роликовый конвейер 14 в направляющих 9 не перемещается, а подвод осуществляется телескопическим ленточным конвейером 5 и поворотом роликового конвейера 14 на раме 6 с помощью опорно-поворотного механизма 7.
Формула изобретения
Устройство для перегрузки затареи- ных мешков, включающее ленточный конвейер и сочлененный с ним захватный орган с вращающимся роликом, выполненным с гребенчатой поверхностью,
отличающееся тем что, с целью повышения надежности работы устройства и производительности, оно снабжено направляющими, в которых установлен с возможностью продольного
перемещения захватный орган, выполненный в виде роликового конвейера с расположенным под ним кожухом в виде лыжи с силовым цилиндром продольного перемещения, с приводным барабаном, со шкивами, смонтированными соосно с роликами роликового конвейера, роликом с гребенчатой поверхностью и приводным барабаном, и с охватывакици- ми шкивы ремнямио
II
n.-.
18 гЗ 9 197J
Фие.г
25 S го
фиг.
w
гв
фиг. 5
r Jmr fjir Jr - jf jrjfj,Hi m..
/5 -H
Л
П
Б-s
B S
J/
53
/5
ЪО
Фие.б
фиг Л
д-д
j;
29
фиг. 8
| УСТРОЙСТВО ДЛЯ ВЫГРУЗКИ ЗАТАРЕННЫХ МЕШКОВ ИЗ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 0 |
|
SU335190A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
