сд
О) Uvj 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электроприводом экскаватора и устройство для его осуществления | 1990 |
|
SU1740573A1 |
| Электропривод с ограничением динамических усилий в механизмах экскаватора | 1987 |
|
SU1582314A1 |
| Позиционный электропривод | 1982 |
|
SU1084727A1 |
| СПОСОБ УПРАВЛЕНИЯ ВИНТОВЫМ МЕХАНИЗМОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2013798C1 |
| Система противопомпажного управления компрессорной установкой | 1991 |
|
SU1776886A1 |
| Устройство для двухзонного регулирования скорости многодвигательного электропривода | 1980 |
|
SU875570A1 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
| Способ управления копающим механизмом экскаватора и устройство для его осуществления | 1980 |
|
SU901417A1 |
| СПОСОБ АСИНХРОННОГО УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2010 |
|
RU2450412C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025310C1 |
Изобретение относится к управлению главными электроприводами одноковшовых экскаваторов и предназначено для защиты механического оборудования от аварийных режимов /АР/. Цель - повышение надежности работы экскаватора при одновременной защите его оборудования от АР. Для этого определяют полярность текущего значения скорости перемещения /СП/ и полярность рассогласования между заданным и текущим значениями СП. Затем определяют ускорение перемещения и его полярность и сравнивают ее с полярностью рассогласования заданного и текущего значений СП. При совпадении их погрешностей сравнивают полярности текущего значения СП и ускорения и в случае их совпадения снижают до нуля напряжение преобразователя 6, останавливая двигатель 7. Устройство для осуществления способа состоит из командоаппарата 1, регуляторов скорости 2 и тока 4, датчиков скорости 3 и тока 5, блока 9 ускорения, блоков сравнения /БС/ 8, 10-14 и исполнительного блока 15 защиты преобразователя 6. Соответствие протекающего в приводе режима заданному контролируется блоком 9 ускорения и БС 8, 10-14. В рабочих режимах привода сигнал на выходе БС 12 появляется только при стопорении привода, а на выходе БС 13 напряжение при этом равно нулю. В результате не создается условий для появления сигнала на выходе БС 14, к которому подключен блок 15 защиты преобразователя 6. Сигнал на выходе БС 14 появляется только при возникновении АР. 2 с.п.ф-лы, 3 ил.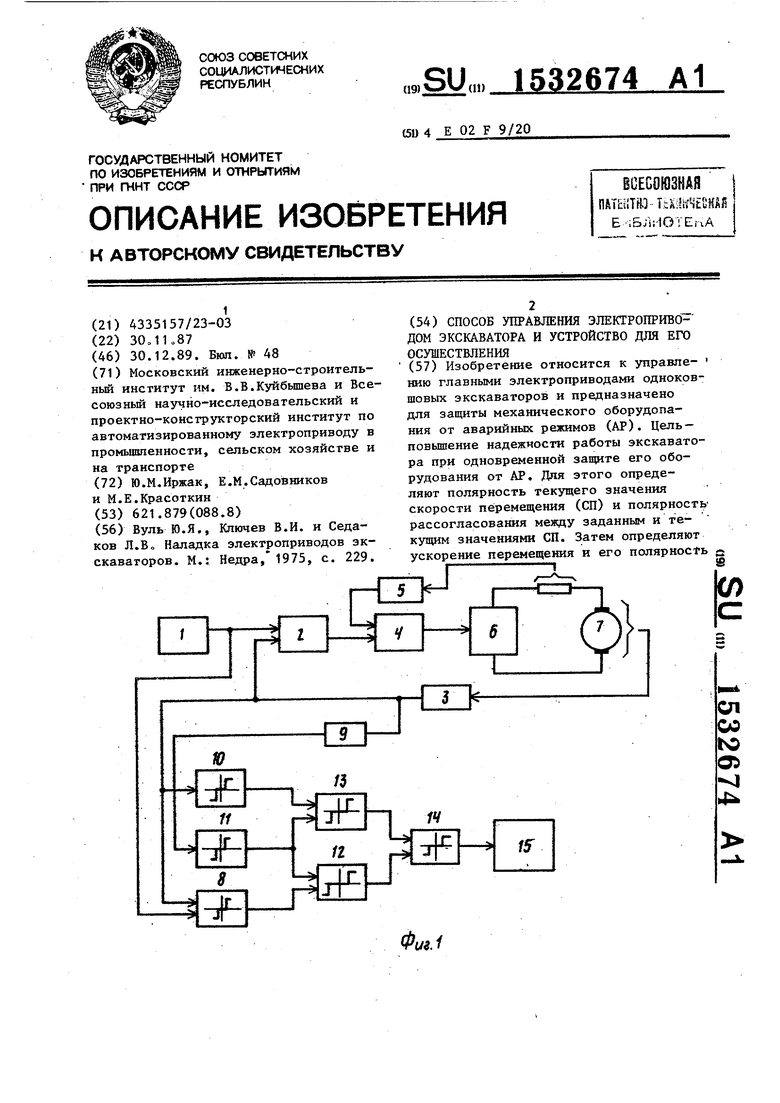
Фм.1
и сравнивают ее с полярностью рассогласования заданного и текущего значений СП. При совпадении их погрешностей сравнивают полярности текущего значения СП и ускорения и в случае их совпадения снижают до нуля напряжение преобразователя 6, останавливая двигатель 7. Устр-во для осуществления способа состоит из командоаппара- га 1, регуляторов скорости 2 и тока 4, датчиков скорости 3 и тока 5, блока 9 ускорения, блоков сравнения (БС) 8, 10-14 и исполнительного бло- 15 защиты преобразователя 6. Соот-
Изобретение относится к управлению 2 главными электроприводами одноковшовых экскаваторов и предназначено для защиты механического оборудования от аварийных режимов, вызванных отказом каких-либо элементов в системах уп- . 2 равления электроприводами.
Целью изобретения является повышение надежности экскаватора в работе при одновременной защите его обору«- дования от аварийных режимов. з
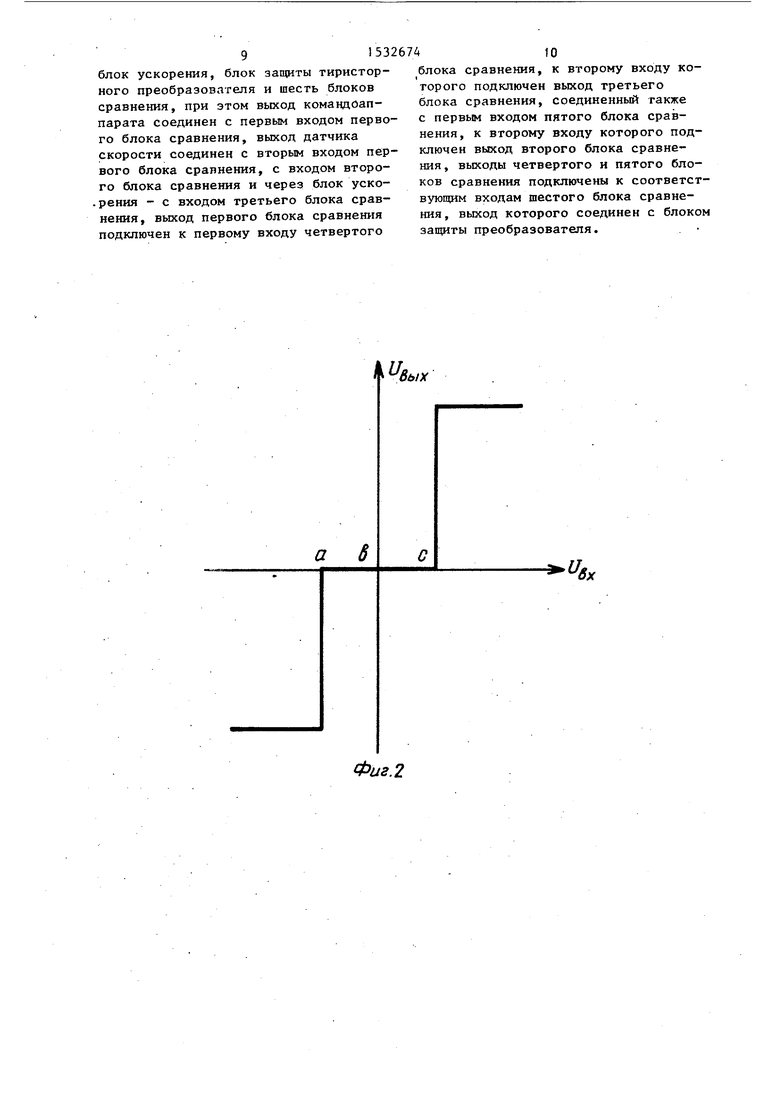
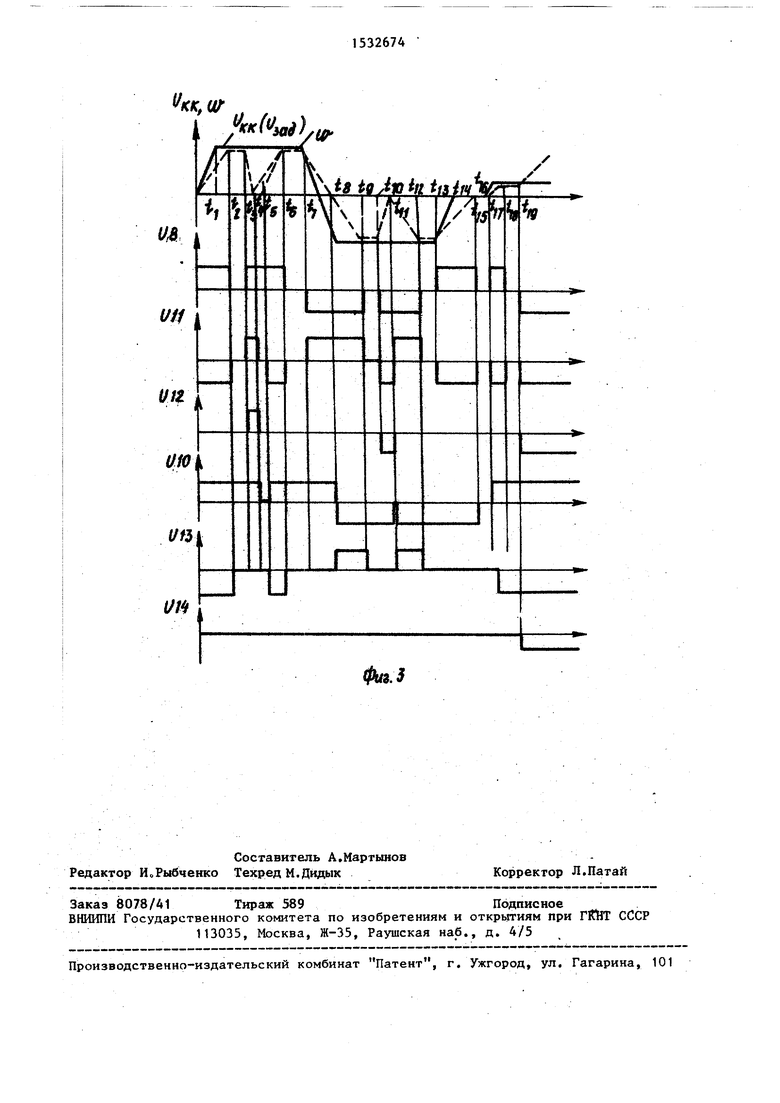
На фиг. 1 изображена функциональная схема устройства, реализующего способ управления электроприводом экс- к.аватора; на фиг. 2 - характеристика вход-выход нелинейных элементов; ., на фиг о 3 - временные диаграммы поэлементного функционирования устройства.
Сущность способа заключается в том, что задают скорость перемещения меха- низка, определяют ее текущее значение, сравнивают их значения, задают в функции полученного рассогласования ток якорной цепи, сопоставляют с текущим его значением и в зависимости от их д рассогласования изменяют напряжение преобразователя, дополнительно определяют полярность рассогласования между заданным и текущим значениями скорости перемещения, выявляют полярность C ускорения, сопоставляют ее с полярностью рассогласования заданного и текущего значений скоростей механизма, при несовпадении их полярностей сравнивают полярности текущего значения скорости перемещения и ускорения и в случае их совпадения снижают до нуля напряжение преобразователя, останавливая привод.
ветствие протекающего в приводе режима заданному -контролируется блоком 9 ускорения и БС 8, 10-14. В рабочих режимах привода сигнал на выходе БС 12 появляется только при стопорении привода, а на выходе БС 13 напряжение при этом равно нулю. В результате не создается условий для появления сигнала на выходе БС 14, к которому подключен блок 15 защиты преобразователя 6. Сигнал на выходе БС 14 появляется только при возникновении АР. 2 с.п. ф-лы, 3 ил.
Устройство, реализующее способ управления электроприводом экскаватора по системе управляемый преобразователь - двигатель с подчиненным регулированием параметров, включает в себя командоаппарат 1, регулятор 2 скорости, датчик 3 скорости, регулятор 4 тока, датчик 5 тока, преобразователь 6, двигатель 7, первый блок 8 сравнения, блок 9 ускорения, второй 10, третий 11, четвертый 12, пятый 13 и шестой 14 блоки сравнения, исполнительный блок 15 защиты преобразователя.
Командоаппарат 1 выходом подключен к первому входу первого блока 8 сравнения и к первому входу регулятора 2 скорости, к второму входу которого подсоединен датчик 3 скорости. Первый вход регулятора 4 тока связан с выходом регулятора 2 скорости, второй вход - с выходом датчика 5 тока. Выход регулятора 4 тока подключен к управляемому преобразователю 6, питающему двигатель 7.
Выход датчика 3 скорости соединен с вторым входом первого блока 8 сравнения , с входом второго блока 10 сравнения и через блок 9 ускорения - с входом третьего блока 11 сравнения. Выход первого блока 8 сравнения подключен к первому входу четвертого блока 12 сравнения. Выход третьего блока 11 сравнения подключен к второму входу четвертого блока 12 сравнения и первому входу пятого блока 13 сравнения. Выход второго блока 10 сравнения подключен к второму входу пятого блока 13 сравнения. Выходы четвертого блока 12 сравнения и пятого
блока 13 сравнения соответственно подключены к первому и второму входам шестого блока 14 сравнения, йыход которого подключен к входу исполнительного блока 15 защиты преобразователя.
Способ осуществляется следующим образом.
Сигнал с командоаппарата 1 подается на вход регулятора 2 скорости, где сравнивается с сигналом, пропорциональным текущей скорости, который определяется с помощью датчика 3 скорости. Напряжение на выходе регулятора 2 скорости определяет задание на ток якорной цепи привода. Это задание на ток сопоставляется с текущим значением тока, определяемым с помощью датчика 5 тока. Сигнал на выходе регулятора 4 тока, зависящий и от его передаточной функции, определяет напряжение преобразователя 6. Скорость двигателя 7 при постоянном потоке возбуждения пропорциональна напряжению преобразователя. Таким образом, в рабочих режимах скорость двигателя определяется соотношением сигналов задания, обратных связей по току и напряжению, а также передаточными функциями системы управления и элект- ромеханической системы привода.
Соответствие протекающего в приводе режима заданному контролируется с помощью блока 9 ускорения и блоков 8, 10-14 сравнения. Как видно из временных диаграмм работы привода и элементов устройства для его управления в режимах разгона, реверса и торможения- (фиг. 3) ускорение и разность между заданным и текущим значениями скоростей имеют одинаковую полярность Полярность разности между заданным и текущим значениями скоростей выявляется с помощью первого блока 8 сравнения, а полярность ускорения - с по- мощью третьего блока 11 сравнения, на вход которого поступает сигнал, пропорциональный ускорению, но с об- ратным знаком. Характеристики первого 8 и третьего 11 блоков сравнения имеют незначительную зону нечувствительности abc (фиг. 2), определяемую в первом случае внешней статистической характеристикой привода, во втором - возможной погрешностью блока 9 ускорения. При одинаковой полярности сигнала, определяемого разностью напряжений, пропорциональных заданной и текущей скоростям, и сигнала, про
Q 0 5 0
Q 5 Q 5
5
порционального ускорению, напряжение на выходе четвертого блока 12 сравнения равно нулю (сигнал на выходе третьего блока 11 сравнения имеет поляр-, ность, обратную полярности ускорения привода). Зона нечувствительности abc (фиг. 2) четвертого блока 12 сравнения определяется из условия появления сигнала на его выходе только при наличии сигналов одной полярности на его входах.
В периоды разгона (O-tg), реверса (tf-tq) и торможения (t,5-t48,фиг.З) сигналы на выходах первого 8 и третьего 11 блоков сравнения имеют различную полярность, поэтому сигнал на выходе четвертого блока 12 сравнения во всех этих режимах равен нулю. Этот сигнал равен нулю и в режимах установившегося движения (промежутки времени са-ц; tQ-t,0; t,s-t tb), поскольку нулю равны и сигналы на выходах первого 8 и третьего 11 блоков сравнения. Шестой блок 14 сравнения имеет зону нечувствительности abc (фиг. 2), определяемую условием появления на его выходе сигнала только в случае наличия сигналов одной полярности на его входах. Поэтому при отсутствии сигнала на выходе четвертого блока 12 сравнения отсутствует сигнал и на выходе шестого блока сравнения. В режиме стопорения механизма, характерном для копающих приводов экскаватора, рассогласование между заданной и текущей скоростями и ускорение механизма имеют различные полярности. На временной диаграмме (фиг. 3) эти режимы соответстпуют промежуткам времени tj-t/i и Ню -ti( . Сигналы на выходах первого 8 и третьего 11 блоков сравнения в этих режимах имеют одну полярность, поэтому на выходе четвертого блока 12 сравнения появляется сигнал (фиг. 2).
На входах пятого блока 13 сравнения сопоставляются сигналы с выходов второго 10 и третьего 11 блоков сравнения . Полярность напряжения на выходе второго блока 10 сравнения обратна полярности скорости привода, полярность напряжения на выходе третьего : блока 11 сравнения обратна действительной полярности ускорения. Поэтому в рабочих режимах разгона, торможения и реверса привода на выходе пятого блока 13 сравнения имеется сигнал, а в режимах установившегося движения
и стопорения этот сигнал равен нулю, что видно из временной диаграммы на фиг. 3 (промежутки времени t«-t5; to-c и др.).5
Таким образом, в рабочих режимах привода сигнал на выходе четвертого блока 12 сравнения появляется только при стопорении привода, а на выходе пятого блока 13 сравнения в этом JQ режиме напряжение равно нулю. Поэтому в любом рабочем режиме привода не создается условий для появления сигнала на выходе шестого блока 14 сравнения, к которому подключен исполни- 1 тельный блок защиты преобразователя. Сигнал на выходе шестого блока 14 сравнения появляется только при возникновении аварийного режима в приводе Рассмотрим это с помощью вре- 2 менной диаграммы (фиг. 3).
В момент времени t в систему управления приводом подается сигнал от командоаппарата 1. В момент времени t )7 скорость механизма до- 2 сгигаег заданной, напряжение на выходе шестого блока 14 сравнения отсутствует, поскольку только на одном его входе имеется сигнал (с выхода пятого блока 13 сравнения). При уста-з новившемся движении (период времени ) сигнал на входах шестого блока 14 сравнения равен нулю, поэтому на его выходе также отсутствует напряжение. Пусть в момент времени t)7 , в результате какой-либо причины возникло явление самог.да, т„е. скорость привода превышает заданную, причем привод не подчиняется управляющему сигналу с выхода командоконт- д роллера.
Поскольку разность между заданным и текущим значениями скорости становится отрицательной, а полярность сигнала на выходе третьего блока 11 сравнения при положительном ускорении также отрицательная, то на выходе четвертого блока 12 сравнения появляется отрицательный сигнало Поскольку скорость и ускорение механизма положи- C гельны,то на выходах третьего 11 и второго 10 блоков сравнения и соответственно на выходе пятого блока 13 сравнения напряжение также отрицательное „ Наличие на входах шестого блока 14 сравнения двух отрицательных сигналов приводит к появлению напряжения на его выходе и к срабатыванию исполнительного блока 15 защиты пре5
0
5 о c о
5 Q
5
образователя. Исполнительный блок 15 снижает напряжение преобразователя 6 до нуля и останавливает привод, предотвращая тем самым аварию
Таким образом, при любом режиме работы привода, отличающемся от заданного, кроме режима стопорения, на выходе шестого блока 14 сравнения появляется напряжение, приводящее к срабатыванию исполнительного блока 15 защиты преобразователя.
Способ управления приводом экскаватора и устройство для его реализации исключают аварийные режимы привода, вызванные отказом элементов системы управления,,
Формула изобретения
и текущим значениями скорости перемещения, ускорение перемещения, полярность ускорения перемещения, сравнивают ее с полярностью рассогласования заданного и текущего значений скоростей перемещения механизма и с полярностью текущей скорости перемещения механизма и в случае совпадения результатов сравнения формируют сигнал на остановку механизма.
блок ускорения, блок защиты тиристор- ного преобразователя и шесть блоков сравнения, при этом выход командоап- парата соединен с первым входом первого блока сравнения, выход датчика скорости соединен с вторым входом первого блока сравнения, с входом второго блока сравнения и через блок уско- .рения - с входом третьего блока сравнения, выход первого блока сравнения подключен к первому входу четвертого
а 8
блока сравнения, к второму входу которого подключен выход третьего блока сравнения, соединенный также с первым входом пятого блока сравнения, к второму входу которого подключен выход второго блока сравнения, выходы четвертого и пятого блоков сравнения подключены к соответствующим входам шестого блока сравнения, выход которого соединен с блоком защиты преобразователя.
А Ч.
Вых
Фиг.2
VKK,W
№ь)
Фаг. 5
| Буль Ю.Я., Ключев В.И | |||
| и Седа- ков Л.В о Наладка электроприводов экскаваторов | |||
| М.: Недра, 1975, с | |||
| Приспособление для подачи воды в паровой котел | 1920 |
|
SU229A1 |
