(Б) ПНЕВМАТИЧЕСКИЙ КОМАНДОАППАРАТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления пневматическим манипулятором | 1978 |
|
SU943647A1 |
| УСТРОЙСТВО для | 1969 |
|
SU258008A1 |
| Пневматический привод грузоподъем-НОгО уСТРОйСТВА | 1978 |
|
SU812695A1 |
| Пневматическая система управления | 1988 |
|
SU1532900A1 |
| Система включения преимущественно для кривошипных прессов | 1981 |
|
SU1085329A1 |
| Привод перемещения стрелы уравновешенного подъемника | 1982 |
|
SU1084229A1 |
| ПНЕВМОПРИВОД МЕХАНИЗМА АВТОМАТИЗИРОВАННОЙ МАШИНЫ | 1998 |
|
RU2140029C1 |
| ПАРОВОЗДУШНЫЙ молот | 1967 |
|
SU199645A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ С ОТКЛЮЧАЕМЫМИ ЦИЛИНДРАМИ | 1997 |
|
RU2116484C1 |
| Устройство управления | 1974 |
|
SU735830A1 |
Изобретение относится к пневматическим командоаппаратам, используемым в пневматических системах управления исполнительными пневмоцилиндрами рабочих органов различных машини механизмов.
Известен пневматический командоаппарат, содержащий источник питания, пневмоцилиндры, распределительный вал с кулачками, конечные клапаны управления пневмоцилиндрами, взаинодейсвующие с кулачками распределительного вала, привод периодического поворота распределительного вала с двухпдзиционным пневмоуправляе№1М клапаном включения привода, конечные клапаны путевого контроля положения поршней пневмоцилиндров, входы которых сообщены с источником питания и атмосферой, а выходы с приводом периодического поворота распределительного вала, при этом привод выполнен в виде пневмомотора и распределительного диска., кинематически связанного с толкателем клапана включения привода, полость управления которого сообщена с выходами конечных клапанов путевого контроля положения поршней пневмоцилиндров D}.
Недостатком известного командоаппарата является сложность конструкции механизма.периодического поворота кулачкового вала, а также трудtoности переналадки на рабочий цикл с изменением числа позиций цикла.
Цель изобретения - упрощение конструкции и расширение функциональных возможностей путем обеспе15чения работы группы пневмоцилиндров в заданной последовательности с возможностью изменения .последовательности их работы и числа позиций рабочего цикла.
20
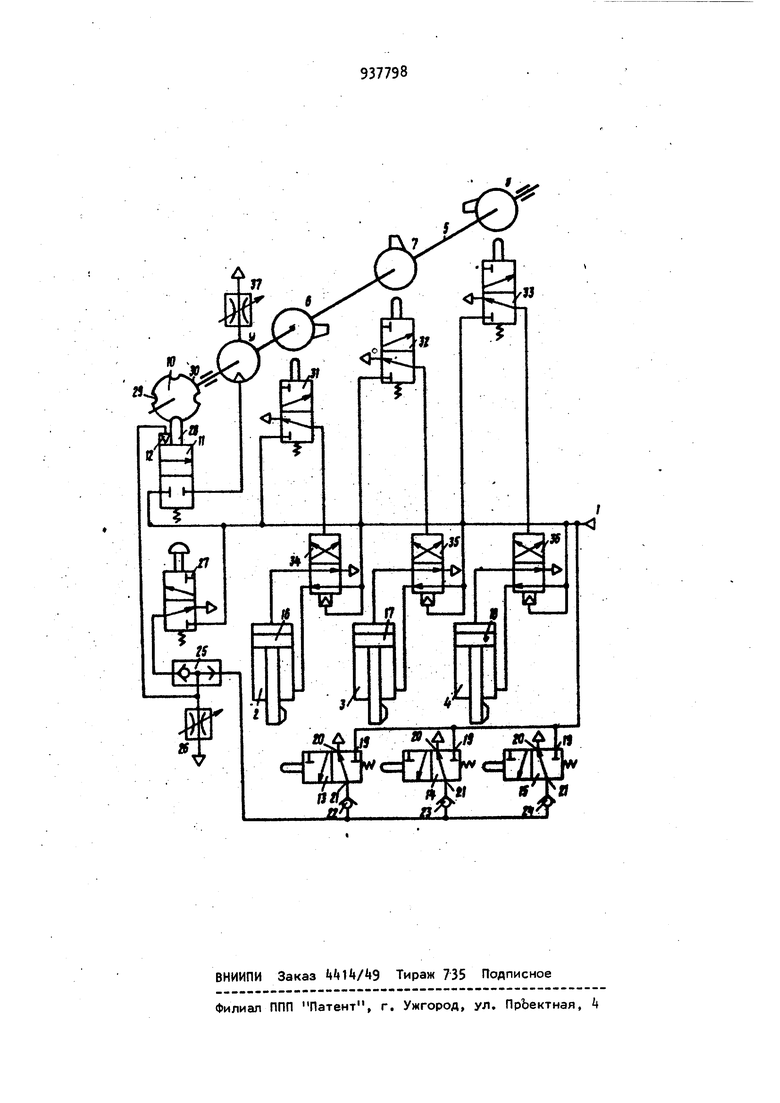
Указанная цель достигается тем, что командоаппарат снабжен клапаном ИЛИ, регулируемым дросселем и обратными клапанами, при этом полость управления клапана включения привода сообщена через дроссель с атмосферой и через клапан ИЛИ и обратные клапаны - с выходами конечных клапанов путевого контроля, а толкатель клапана включения привода установлен с возможностью непосредстве ного взаимодействия с распределитель ным диском. На чертеже представлена схема пре лагаемого командоаппарата. Командоаппарат содержит источник 1 питания, пневмоцилиндры 2-, распределительный вал 5 с кулач1ками 6-8, привод периодического лово 1рота распределительного вала 5, выполненный а виде пневмомотора 9 с распределительным диском 10 и двухпозиционным клапаном 11 включени привода с полостью 12 управления, ко нечные клапаны 13-15 путевого контроля поршней 16-18 пневмоцилиндров 2-. Входы 19 и 20 клапанов 13-15 со общены с источником питания 1 и атмосферой соответственно, а выходы 21 через обратные клапаны 22-2 через клапан 25 ИЛИ с полостью 12 управления, сообщенной через регулируемый дрйссель 26 с атмосферой. Командоаппарат снабжен пусковым клапаном 27. Толкатель 28 клапана 11 взаимодействует с впадинами 29 и цилинд рической поверхностью 30 распределительного диска 10. Кулачки 6-8 взаим действуют с конечными клапанами 31-33 управления пневмоцилиндрами 2- соответственно. Пневмоцилиндры 2- через распределители- сообщены, с источником питания 1 и атмосферой . Дроссель 37 предназначен для регулировки угловой скорости пневмомотора 9 Командоаппарат работает следующим образом. кратковременном нажатии на клапан 27 сжатый воздух через клапан 25 ИЛИ поступает в полость 12 пнев; моуп авления клапана 11. При этом кл пан 11 переключается на подвод сжато го воздуха в пневмомотор 9|« Одновременно толкатель 28 клапана 11 выходи из впадины i9 распределительного диска 10 и при повороте распределительного диска 10 контактирует с цилиндрической поверхностью 30 диска. 10, оставляя клапан :11 во включенном положении до захода в следующую впадину 29. Пневмомотор 9 приводит во вращение распределительный вал 5, на угол, определяемый профилем диска 10. В конце поворота толкатель 28 клапана 11 входит в очередную впадину 29 распределительного диска 10. Клапан 11 переключается и разобщает пневмомотор 9 от источника питания 1. Одновременно кулачком 6 на первой позиции рабочего цикла включается конечный клапан 31, переключается распределитель З на подВОД сжатого воздуха в бесштоковую полость исполнительного пневмоцилиндра 2. Поршень 16 пневмоцилиндра 2 совершает рабочий ход. В конце хода переключается клапан 13 на подвод пневмЬсигнала через обратный клапан 22 и 25 в полость 12 пневмоуправления клапана 11, вновь переключается клапан 11 на подвод сжатого воздуха в пневмомотор 9. Происходит очередной поворот распределительного вала 5 на включение второй позиции рабочего цикла, в результате которого поршень 16 пневмоцилиндра 2 возвращается в исходное положение, а поршень 17 пневмоцилиндра 3 совершает рабочий ход. Аналогично происходит включение в работу пневмоцилиндра 4 и возврат поршня 17 пневмоцилиндра 3 в исходное положение на третьей прзйции. Наличие регулируемого дросселя 26, постоянно сообщающего полость 12 пневмоуправления клапана 11 с атмосферой, обеспечивает кратковременность пневмосигналов, поступающих от конечных клапанов 13-15 через обратные клапаны 22-2. Эти пневмосигналы выводят толкатель 28 клапана 1 1 из впадины 29 распределительного диска 10, после чего клапан 11 остается включенным до захода толкателя 28 в следующую впадину 29 делительного диска 10. В конце рабочего цикла при нажатии на клапан 15 происходит автоматическое отключение командоаппарата. Для возобновления работы командоаппарата необходимо кратковременное нажатие на клапан 27. При необходимости непрерывной работы командоаппарата он снабжается дополнительным кулачком (не показан) для автоматического переключения клапана 11 на начальную позицию рабочего цикла, причем это переключение может осуществляться как непосредственно от дополнительного конечного трехлинейного клапана (не показан) , так и через реле времени (не показано J для осуществления паузы в цикле работы командоаппарата. Переналадка командоаппарата на обеспечение работы группы пневмоцилиндров в заданной последовательности с возможностью изменения как последовательности их работы так и числа позиций рабочего цикла (числа Исполнительных пневмоцилиндров ) сводится к перестановке кулачков распределительного вала, изменению их числа и замене делительного дйс.ка. .:. . . . Такое «йполнение командоаппарата позволяет существенно упростить его конструкцию и расширить 4 ункциональные возиожности с одновременным повышением надежности р«й5оты. Формула изобретения Пневматический командоаппарат, со держащий источ1«1К питания, пневмоцилиндры, распределительный вал с ку лачками, конечные клапаны управления пневмоцилийдрами, взаймодействуйциё с кулачкакм распределительного вала, привод периодического поворота распределительного вала с двухпозициоНным пневмоуправляемым клапаном включения привода, конечные клапаны путевого контроля положения поршней пневмоцияиндров, входы которых сообщены с йсточни«к м питания и атмосферой, а выхода - с приводом периодического поворота расгределительного вала, при этом привод выполнен в ви де пневж ютора и распределительного диска, кинематически связанного с толкателем клапана включения привода, полость управления которого сообщена с выходами конечных клапанов путевого кoнtiэoля положения поЕшней. пневмоцил14ндров« о т л и ч а ю щ и йс я тем,- что, с целью расширения « функциональных возмсякностей и упрощения конструкции, командоаппарат снабжен клапаном ИЛИ, регулируемым дросселем и обратными клапанами, при этом полость угфавления клапана включения привода сообщена через дроссель с атмосферой и через клапан ИЛИ и обратные клапаны - с выходами конечных клапанов путевого контроля, а толкатель клапана включения привода установлен с возможностью непосредственного взаимодействия с распределительным диском. Источники информации, принятые во внимание при экспертизе Т, Авторское свидетельство СССР № 5610Т4, кл, F 15 В 11/20, 197.
ts
